 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
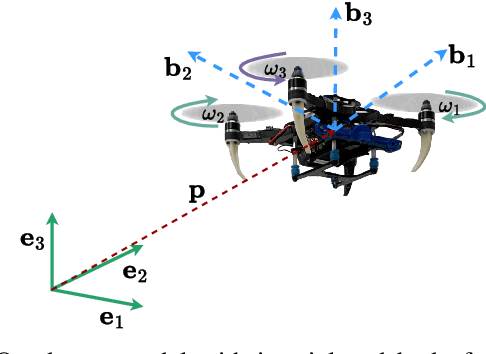
Add to EdgeExperimental System Design of an Active Fault-Tolerant Quadrotor
Apr 09, 2024Quadrotors have gained popularity over the last decade, aiding humans in complex tasks such as search and rescue, mapping and exploration. Despite their mechanical simplicity and versatility compared to other types of aerial vehicles, they remain vulnerable to rotor failures. In this paper, we propose an algorithmic and mechanical approach to addressing the quadrotor fault-tolerant problem in case of rotor failures. First, we present a fault-tolerant detection and control scheme that includes various attitude error metrics. The scheme transitions to a fault-tolerant control mode by surrendering the yaw control. Subsequently, to ensure compatibility with platform sensing constraints, we investigate the relationship between variations in robot rotational drag, achieved through a modular mechanical design appendage, resulting in yaw rates within sensor limits. This analysis offers a platform-agnostic framework for designing more reliable and robust quadrotors in the event of rotor failures. Extensive experimental results validate the proposed approach providing insights into successfully designing a cost-effective quadrotor capable of fault-tolerant control. The overall design enhances safety in scenarios of faulty rotors, without the need for additional sensors or computational resources.
From Propeller Damage Estimation and Adaptation to Fault Tolerant Control: Enhancing Quadrotor Resilience
Oct 19, 2023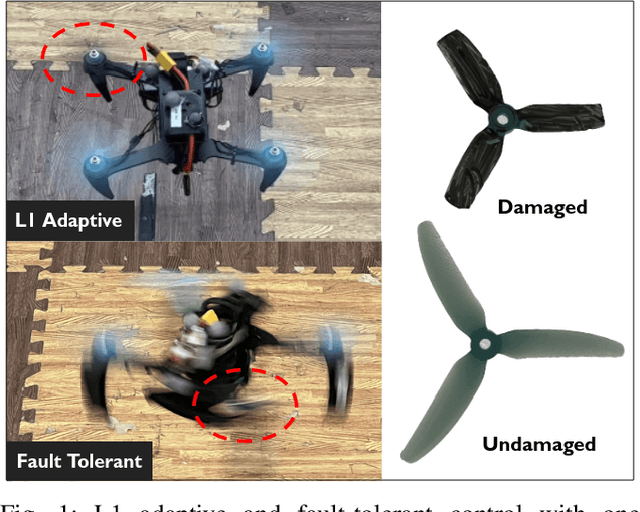
Aerial robots are required to remain operational even in the event of system disturbances, damages, or failures to ensure resilient and robust task completion and safety. One common failure case is propeller damage, which presents a significant challenge in both quantification and compensation. We propose a novel adaptive control scheme capable of detecting and compensating for multi-rotor propeller damages, ensuring safe and robust flight performances. Our control scheme includes an L1 adaptive controller for damage inference and compensation of single or dual propellers, with the capability to seamlessly transition to a fault-tolerant solution in case the damage becomes severe. We experimentally identify the conditions under which the L1 adaptive solution remains preferable over a fault-tolerant alternative. Experimental results validate the proposed approach, demonstrating its effectiveness in running the adaptive strategy in real time on a quadrotor even in case of damage to multiple propellers.
Geometric Fault-Tolerant Control of Quadrotors in Case of Rotor Failures: An Attitude Based Comparative Study
Jun 23, 2023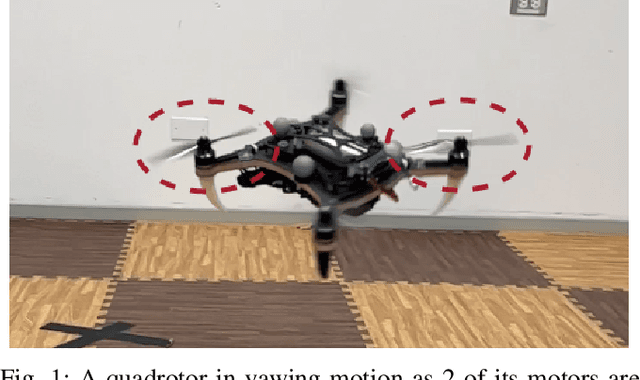

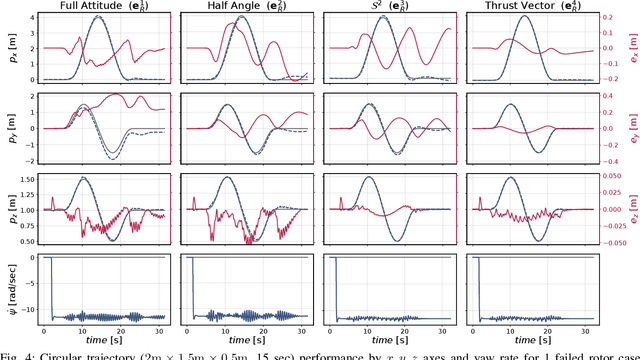
The ability of aerial robots to operate in the presence of failures is crucial in various applications that demand continuous operations, such as surveillance, monitoring, and inspection. In this paper, we propose a fault-tolerant control strategy for quadrotors that can adapt to single and dual complete rotor failures. Our approach augments a classic geometric tracking controller on $SO(3)\times\mathbb{R}^3$ to accommodate the effects of rotor failures. We provide an in-depth analysis of several attitude error metrics to identify the most appropriate design choice for fault-tolerant control strategies. To assess the effectiveness of these metrics, we evaluate trajectory tracking accuracies. Simulation results demonstrate the performance of the proposed approach.