 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Fault-Tolerant Control of Quadrotors in Case of Rotor Failures: An Attitude Based Comparative Study
Paper and Code
Jun 23, 2023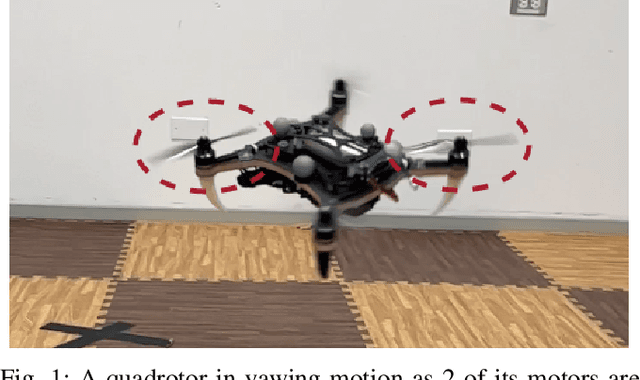
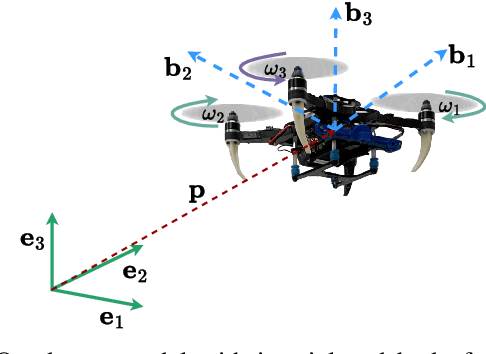

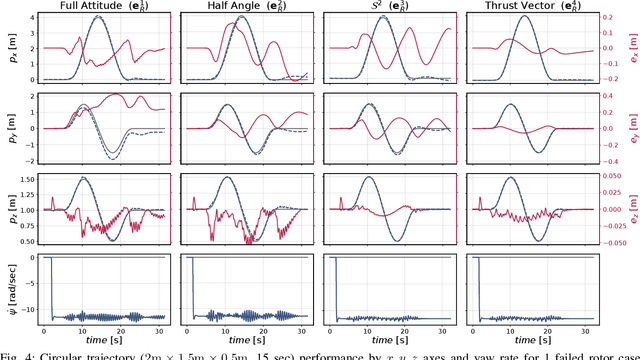
The ability of aerial robots to operate in the presence of failures is crucial in various applications that demand continuous operations, such as surveillance, monitoring, and inspection. In this paper, we propose a fault-tolerant control strategy for quadrotors that can adapt to single and dual complete rotor failures. Our approach augments a classic geometric tracking controller on $SO(3)\times\mathbb{R}^3$ to accommodate the effects of rotor failures. We provide an in-depth analysis of several attitude error metrics to identify the most appropriate design choice for fault-tolerant control strategies. To assess the effectiveness of these metrics, we evaluate trajectory tracking accuracies. Simulation results demonstrate the performance of the proposed approach.