 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Aware Human-Robot Collaborative Transportation and Manipulation with Multiple MAVs
Paper and Code
Oct 12, 2022


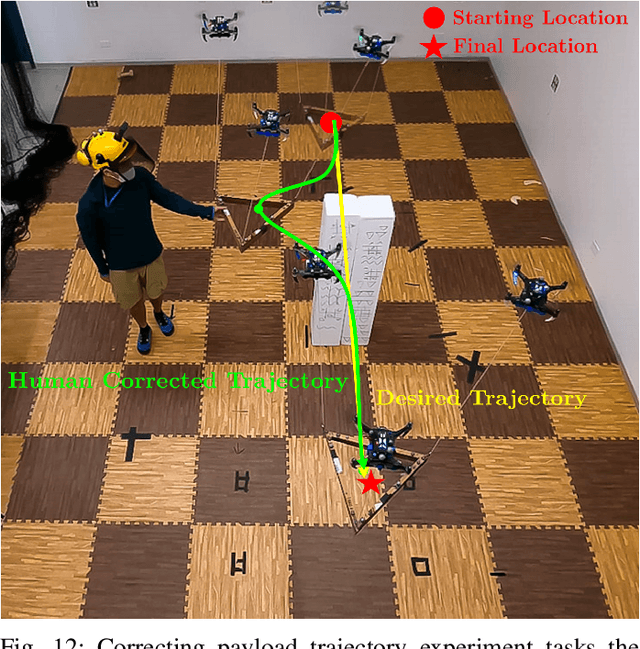
Human-robot interaction will play an essential role in many future industries and daily life tasks, enabling robots to collaborate with humans and reduce their workload effectively. Most existing approaches for human-robot physical collaboration focus on collaboration between humans and grounded robots. In recent years, very little progress has been made in this area when considering aerial robots, which present increased versatility and mobility compared to their grounded counterparts. This paper proposes a novel approach for safe human-robot collaborative transportation and manipulation of a cable-suspended payload with multiple aerial robots. We leverage the proposed method to enable seamless and transparent interaction between the transported objects and a human worker while considering safety constraints during operations by exploiting the redundancy of the internal transportation system. The critical system components are (a) a distributed force-sensor-free payload external wrench estimator; (b) a 6D admittance controller for human-aerial-robot collaborative transportation and manipulation; (c) a safety-aware controller that exploits the internal system redundancy to guarantee the execution of additional tasks devoted to preserving the human or robot safety without affecting the payload trajectory tracking or quality of interaction. We validate the approach through extensive real-world experiments, including the robot team assisting the human in transporting and manipulating a load or the human helping the robot team navigates the environment. To our best knowledge, this work is the first to create an interactive and safety-aware pipeline for quadrotor teams to collaborate physically with a human operator to transport and manipulate a payload.