 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Active Visual Perching with Quadrotors on Inclined Surfaces
Paper and Code
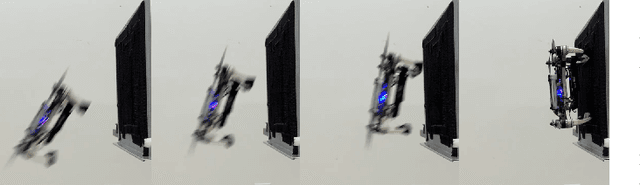
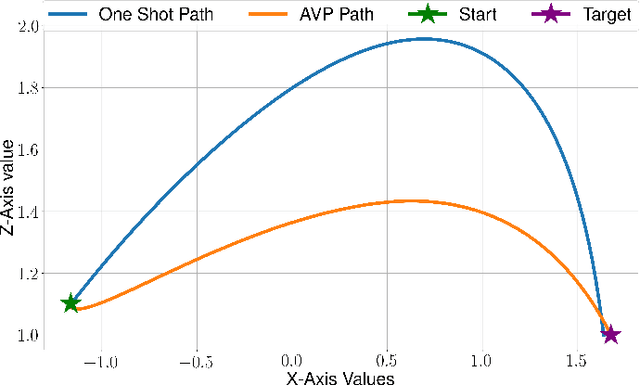
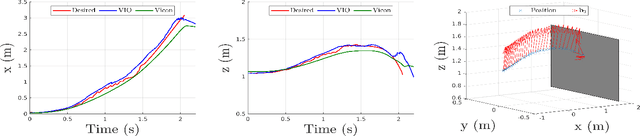
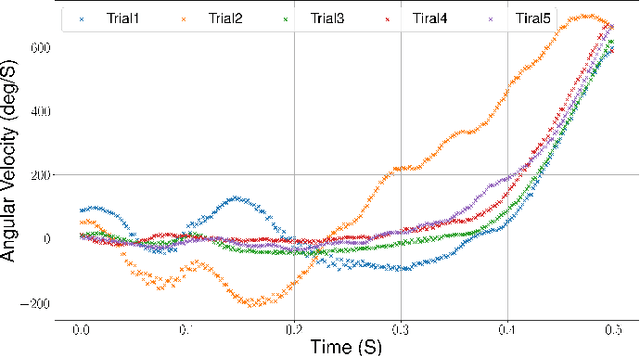
Autonomous Micro Aerial Vehicles are deployed for a variety tasks including surveillance and monitoring. Perching and staring allow the vehicle to monitor targets without flying, saving battery power and increasing the overall mission time without the need to frequently replace batteries. This paper addresses the Active Visual Perching (AVP) control problem to autonomously perch on inclined surfaces up to $90^\circ$. Our approach generates dynamically feasible trajectories to navigate and perch on a desired target location, while taking into account actuator and Field of View (FoV) constraints. By replanning in mid-flight, we take advantage of more accurate target localization increasing the perching maneuver's robustness to target localization or control errors. We leverage the Karush-Kuhn-Tucker (KKT) conditions to identify the compatibility between planning objectives and the visual sensing constraint during the planned maneuver. Furthermore, we experimentally identify the corresponding boundary conditions that maximizes the spatio-temporal target visibility during the perching maneuver. The proposed approach works on-board in real-time with significant computational constraints relying exclusively on cameras and an Inertial Measurement Unit (IMU). Experimental results validate the proposed approach and shows the higher success rate as well as increased target interception precision and accuracy with respect to a one-shot planning approach, while still retaining aggressive capabilities with flight envelopes that include large excursions from the hover position on inclined surfaces up to 90$^\circ$, angular speeds up to 750~deg/s, and accelerations up to 10~m/s$^2$.