 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Data-Driven Fault Diagnosis scheme based on Recursive Dempster-Shafer Combination Rule *
Dec 13, 2022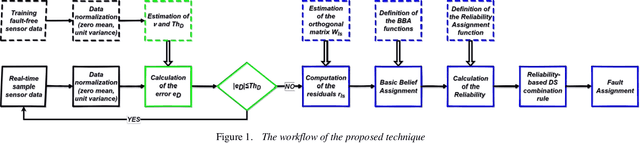
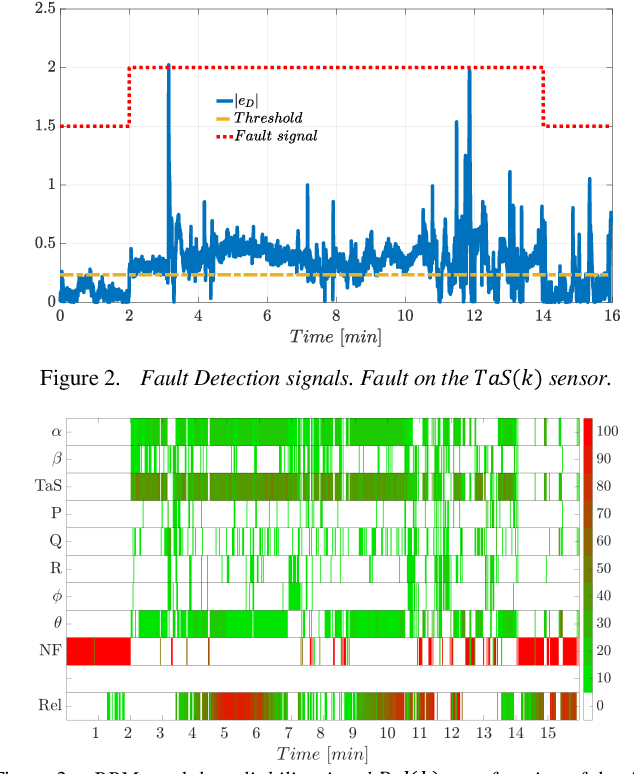
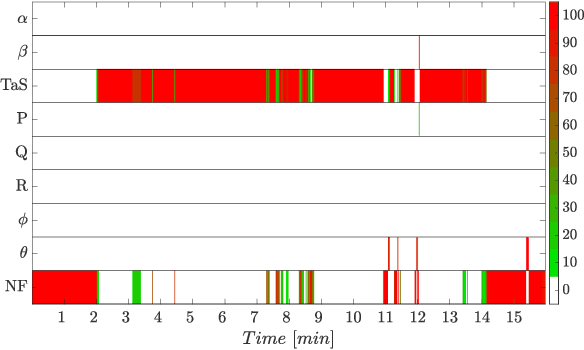
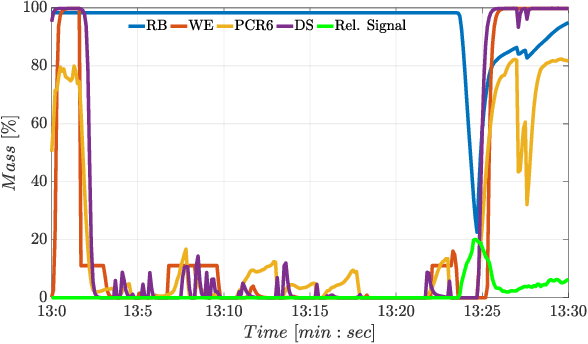
In-flight sensor fault diagnosis and recursive combination of residual signals via the Dempster-Shafer (DS) theory have been considered in this study. In particular, a novel evidence-based combination rule of residual errors as a function of a reliability measure derived from streaming data is proposed for the purpose of online robust sensors fault diagnosis. The proposed information fusion mechanism is divided into three steps. In the first step, the classic DS probability mass combination rule is applied; then, the difference between the previous posterior mass and the current prior mass associated with fault events is computed. Finally, the increment of the posterior mass of a fault event is weighted as a function of a reliability coefficient that depends on the norm of control activity. A Sensor Fault Isolation scheme based on the proposed combination rule has been worked out and compared with well-known state-of-the-art recursive combination rules. A quantitative analysis has been performed exploiting multi-flight data of a P92 Tecnam aircraft. The proposed approach showed to be effective, particularly in reducing the false alarms rate.
PCA Methods and Evidence Based Filtering for Robust Aircraft Sensor Fault Diagnosis
Dec 13, 2022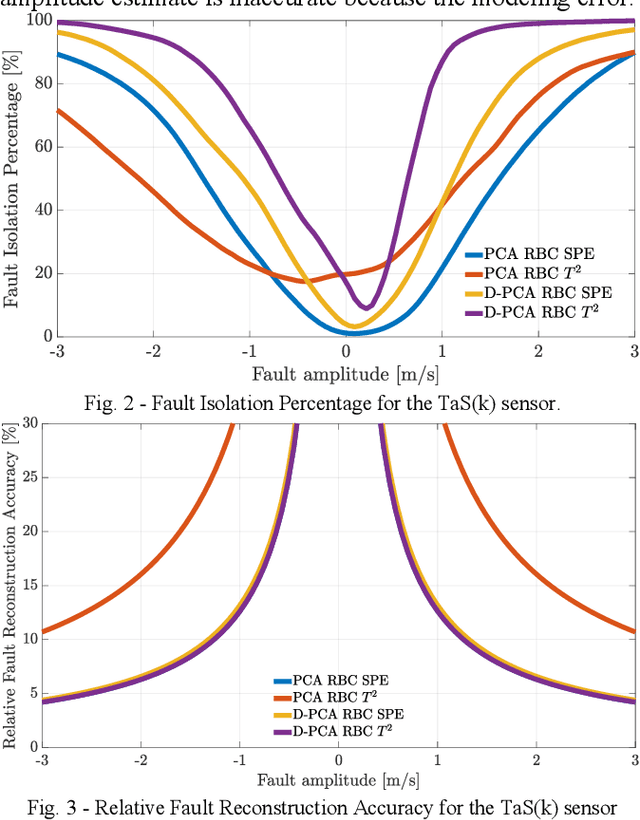
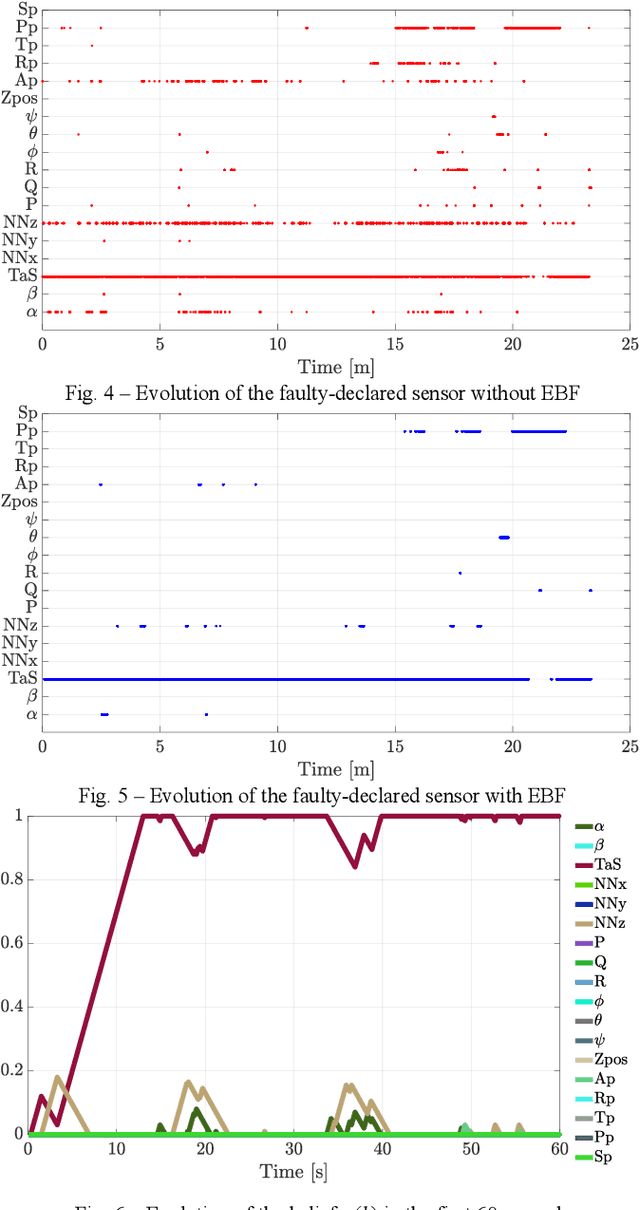
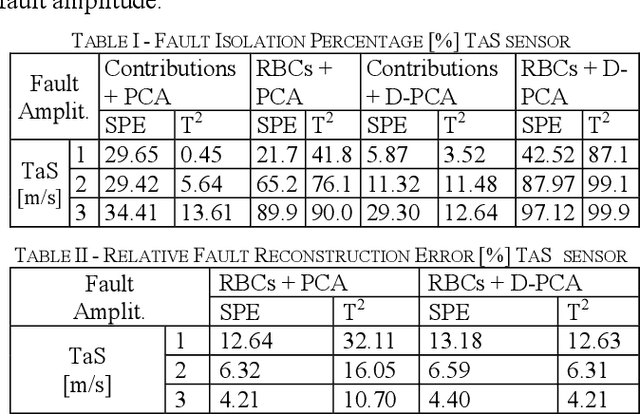
In this paper PCA and D-PCA techniques are applied for the design of a Data Driven diagnostic Fault Isolation (FI) and Fault Estimation (FE) scheme for 18 primary sensors of a semi-autonomous aircraft. Specifically, Contributions-based, and Reconstruction-based Contributions approaches have been considered. To improve FI performance an inference mechanism derived from evidence-based decision making theory has been proposed. A detailed FI and FE study is presented for the True Airspeed sensor based on experimental data. Evidence Based Filtering (EBF) showed to be very effective particularly in reducing false alarms.
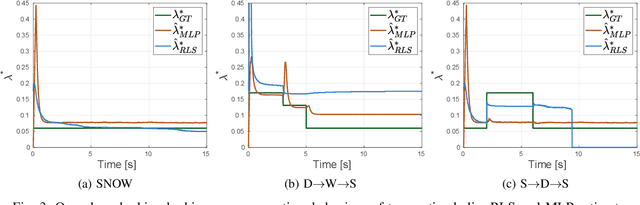
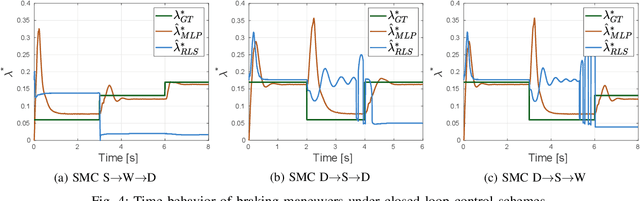
Tire-road friction estimation and uncertainty assessment to improve electric aircraft braking system
Nov 14, 2022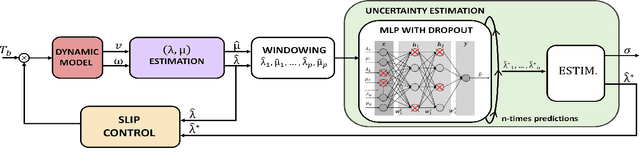
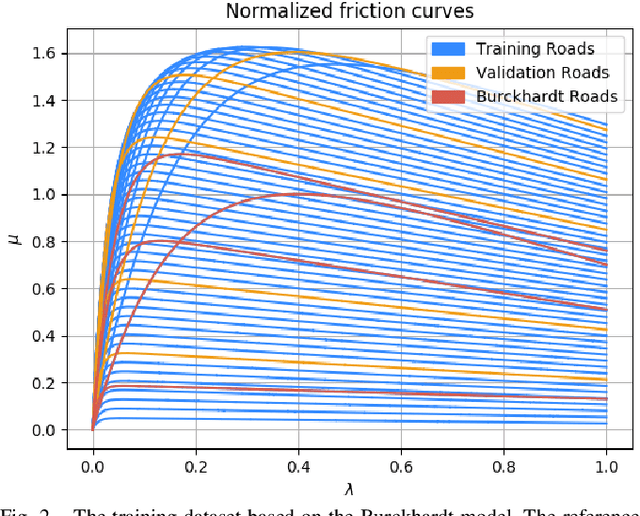
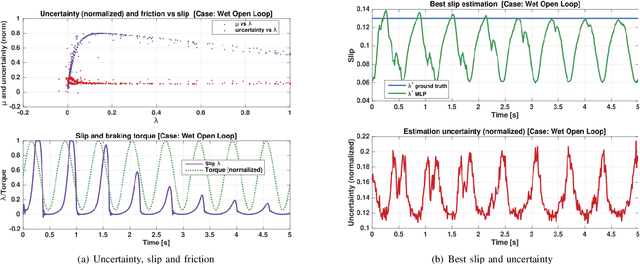
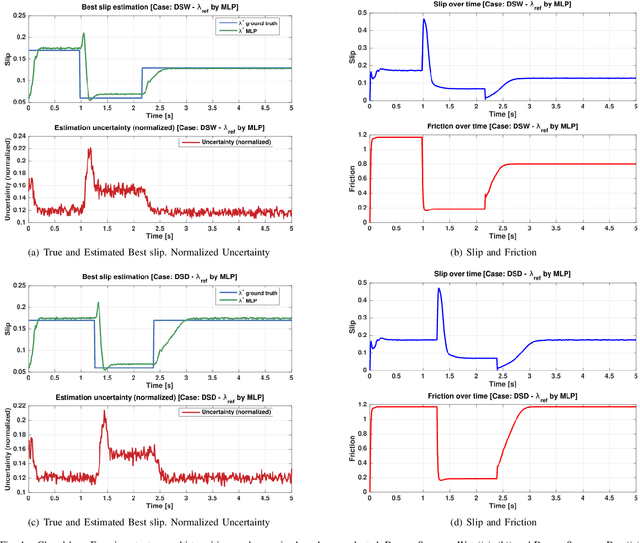
The accurate online estimation of the road-friction coefficient is an essential feature for any advanced brake control system. In this study, a data-driven scheme based on a MLP Neural Net is proposed to estimate the optimum friction coefficient as a function of windowed slip-friction measurements. A stochastic NN weights drop-out mechanism is used to online estimate the confidence interval of the estimated best friction coefficient thus providing a characterization of the epistemic uncertainty associated to the NN block. Open loop and closed loop simulations of the landing phase of an aircraft on an unknown surface are used to show the potentiality and efficacy of the proposed robust friction estimation approach.
A Data-Driven Slip Estimation Approach for Effective Braking Control under Varying Road Conditions
Nov 04, 2022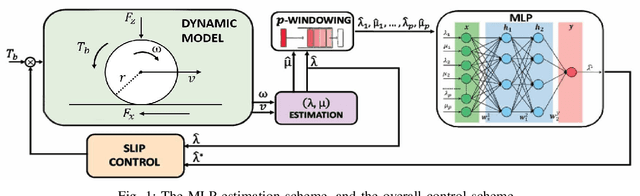
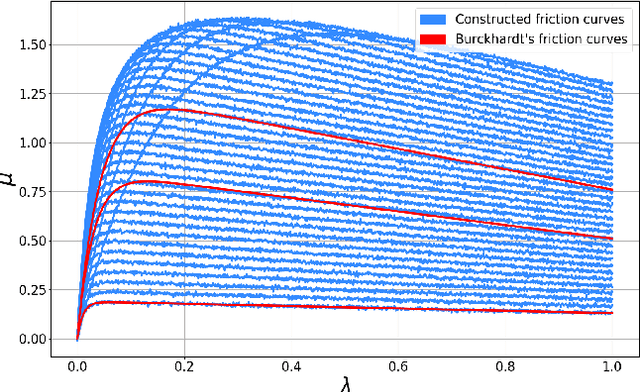
The performances of braking control systems for robotic platforms, e.g., assisted and autonomous vehicles, airplanes and drones, are deeply influenced by the road-tire friction experienced during the maneuver. Therefore, the availability of accurate estimation algorithms is of major importance in the development of advanced control schemes. The focus of this paper is on the estimation problem. In particular, a novel estimation algorithm is proposed, based on a multi-layer neural network. The training is based on a synthetic data set, derived from a widely used friction model. The open loop performances of the proposed algorithm are evaluated in a number of simulated scenarios. Moreover, different control schemes are used to test the closed loop scenario, where the estimated optimal slip is used as the set-point. The experimental results and the comparison with a model based baseline show that the proposed approach can provide an effective best slip estimation.