 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Collision Avoidance for Safe Agile Navigation
Sep 18, 2024

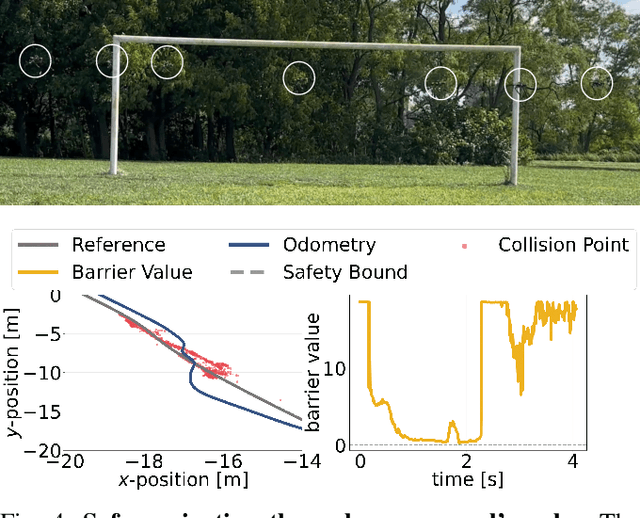

Reactive collision avoidance is essential for agile robots navigating complex and dynamic environments, enabling real-time obstacle response. However, this task is inherently challenging because it requires a tight integration of perception, planning, and control, which traditional methods often handle separately, resulting in compounded errors and delays. This paper introduces a novel approach that unifies these tasks into a single reactive framework using solely onboard sensing and computing. Our method combines nonlinear model predictive control with adaptive control barrier functions, directly linking perception-driven constraints to real-time planning and control. Constraints are determined by using a neural network to refine noisy RGB-D data, enhancing depth accuracy, and selecting points with the minimum time-to-collision to prioritize the most immediate threats. To maintain a balance between safety and agility, a heuristic dynamically adjusts the optimization process, preventing overconstraints in real time. Extensive experiments with an agile quadrotor demonstrate effective collision avoidance across diverse indoor and outdoor environments, without requiring environment-specific tuning or explicit mapping.
Modular Multi Target Tracking Using LSTM Networks
Nov 16, 2020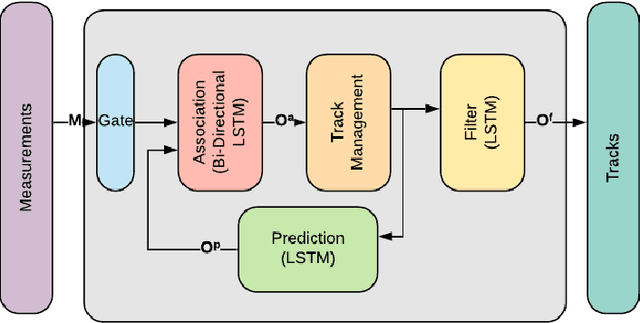
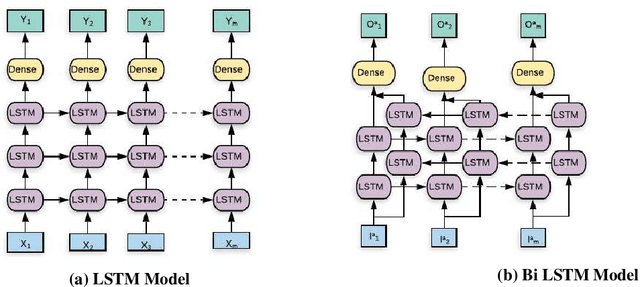
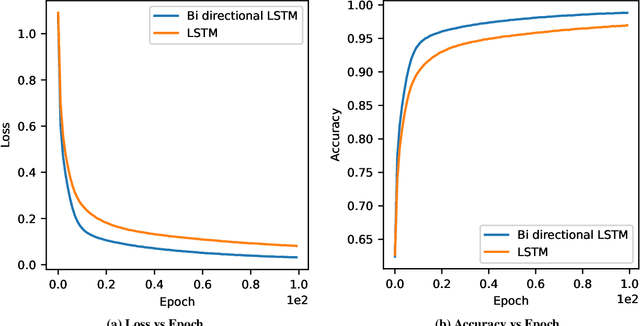
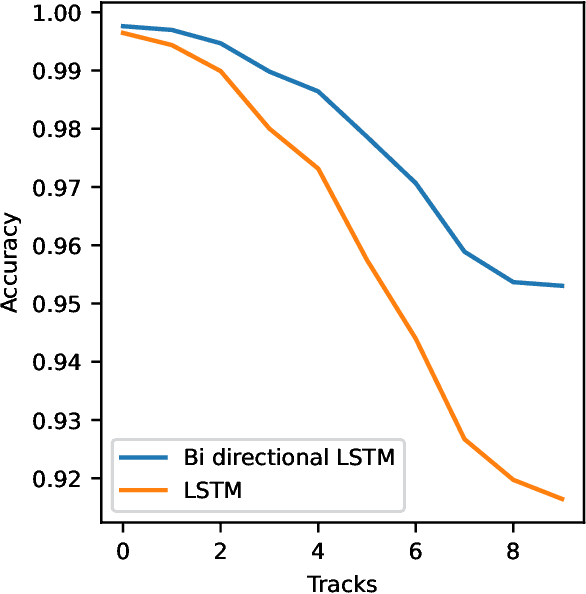
The process of association and tracking of sensor detections is a key element in providing situational awareness. When the targets in the scenario are dense and exhibit high maneuverability, Multi-Target Tracking (MTT) becomes a challenging task. The conventional techniques to solve such NP-hard combinatorial optimization problem involves multiple complex models and requires tedious tuning of parameters, failing to provide an acceptable performance within the computational constraints. This paper proposes a model free end-to-end approach for airborne target tracking system using sensor measurements, integrating all the key elements of multi target tracking -- association, prediction and filtering using deep learning with memory. The challenging task of association is performed using the Bi-Directional Long short-term memory (LSTM) whereas filtering and prediction are done using LSTM models. The proposed modular blocks can be independently trained and used in multitude of tracking applications including non co-operative (e.g., radar) and co-operative sensors (e.g., AIS, IFF, ADS-B). Such modular blocks also enhances the interpretability of the deep learning application. It is shown that performance of the proposed technique outperforms conventional state of the art technique Joint Probabilistic Data Association with Interacting Multiple Model (JPDA-IMM) filter.