 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Safety Filters with Poisson Safety Functions and Laplace Guidance Fields
Oct 29, 2025Robotic systems navigating in real-world settings require a semantic understanding of their environment to properly determine safe actions. This work aims to develop the mathematical underpinnings of such a representation -- specifically, the goal is to develop safety filters that are risk-aware. To this end, we take a two step approach: encoding an understanding of the environment via Poisson's equation, and associated risk via Laplace guidance fields. That is, we first solve a Dirichlet problem for Poisson's equation to generate a safety function that encodes system safety as its 0-superlevel set. We then separately solve a Dirichlet problem for Laplace's equation to synthesize a safe \textit{guidance field} that encodes variable levels of caution around obstacles -- by enforcing a tunable flux boundary condition. The safety function and guidance fields are then combined to define a safety constraint and used to synthesize a risk-aware safety filter which, given a semantic understanding of an environment with associated risk levels of environmental features, guarantees safety while prioritizing avoidance of higher risk obstacles. We demonstrate this method in simulation and discuss how \textit{a priori} understandings of obstacle risk can be directly incorporated into the safety filter to generate safe behaviors that are risk-aware.
Safe and Dynamically-Feasible Motion Planning using Control Lyapunov and Barrier Functions
Oct 10, 2024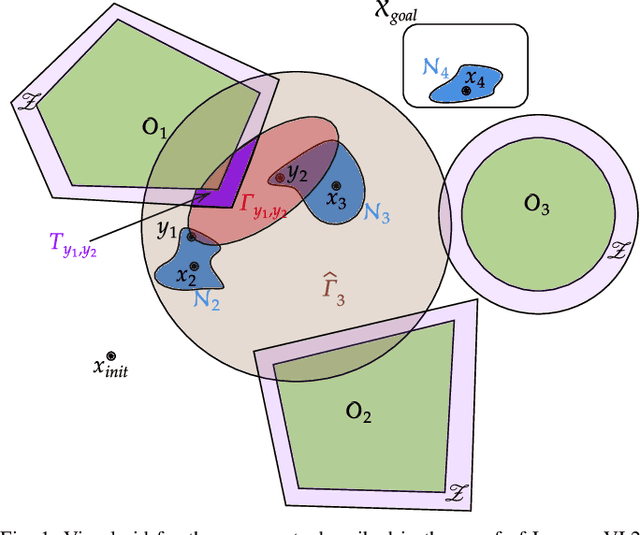

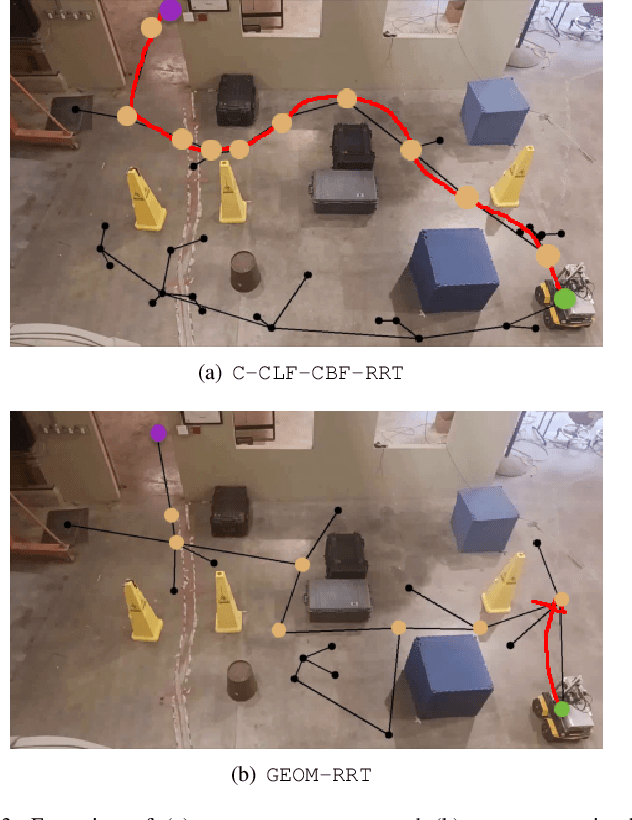
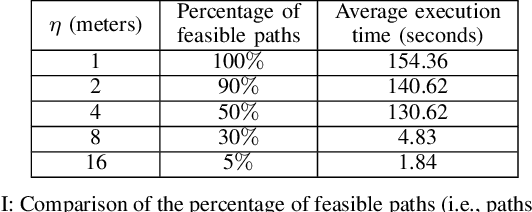
This paper considers the problem of designing motion planning algorithms for control-affine systems that generate collision-free paths from an initial to a final destination and can be executed using safe and dynamically-feasible controllers. We introduce the C-CLF-CBF-RRT algorithm, which produces paths with such properties and leverages rapidly exploring random trees (RRTs), control Lyapunov functions (CLFs) and control barrier functions (CBFs). We show that C-CLF-CBF-RRT is computationally efficient for a variety of different dynamics and obstacles, and establish its probabilistic completeness. We showcase the performance of C-CLF-CBF-RRT in different simulation and hardware experiments.