 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeB-ActiveSEAL: Scalable Uncertainty-Aware Active Exploration with Tightly Coupled Localization-Mapping
Dec 13, 2025Active robot exploration requires decision-making processes that integrate localization and mapping under tightly coupled uncertainty. However, managing these interdependent uncertainties over long-term operations in large-scale environments rapidly becomes computationally intractable. To address this challenge, we propose B-ActiveSEAL, a scalable information-theoretic active exploration framework that explicitly accounts for coupled uncertainties-from perception through mapping-into the decision-making process. Our framework (i) adaptively balances map uncertainty (exploration) and localization uncertainty (exploitation), (ii) accommodates a broad class of generalized entropy measures, enabling flexible and uncertainty-aware active exploration, and (iii) establishes Behavioral entropy (BE) as an effective information measure for active exploration by enabling intuitive and adaptive decision-making under coupled uncertainties. We establish a theoretical foundation for propagating coupled uncertainties and integrating them into general entropy formulations, enabling uncertainty-aware active exploration under tightly coupled localization-mapping. The effectiveness of the proposed approach is validated through rigorous theoretical analysis and extensive experiments on open-source maps and ROS-Unity simulations across diverse and complex environments. The results demonstrate that B-ActiveSEAL achieves a well-balanced exploration-exploitation trade-off and produces diverse, adaptive exploration behaviors across environments, highlighting clear advantages over representative baselines.
Behaviorally Heterogeneous Multi-Agent Exploration Using Distributed Task Allocation
Sep 10, 2025



We study a problem of multi-agent exploration with behaviorally heterogeneous robots. Each robot maps its surroundings using SLAM and identifies a set of areas of interest (AoIs) or frontiers that are the most informative to explore next. The robots assess the utility of going to a frontier using Behavioral Entropy (BE) and then determine which frontier to go to via a distributed task assignment scheme. We convert the task assignment problem into a non-cooperative game and use a distributed algorithm (d-PBRAG) to converge to the Nash equilibrium (which we show is the optimal task allocation solution). For unknown utility cases, we provide robust bounds using approximate rewards. We test our algorithm (which has less communication cost and fast convergence) in simulation, where we explore the effect of sensing radii, sensing accuracy, and heterogeneity among robotic teams with respect to the time taken to complete exploration and path traveled. We observe that having a team of agents with heterogeneous behaviors is beneficial.
BEASST: Behavioral Entropic Gradient based Adaptive Source Seeking for Mobile Robots
Aug 14, 2025This paper presents BEASST (Behavioral Entropic Gradient-based Adaptive Source Seeking for Mobile Robots), a novel framework for robotic source seeking in complex, unknown environments. Our approach enables mobile robots to efficiently balance exploration and exploitation by modeling normalized signal strength as a surrogate probability of source location. Building on Behavioral Entropy(BE) with Prelec's probability weighting function, we define an objective function that adapts robot behavior from risk-averse to risk-seeking based on signal reliability and mission urgency. The framework provides theoretical convergence guarantees under unimodal signal assumptions and practical stability under bounded disturbances. Experimental validation across DARPA SubT and multi-room scenarios demonstrates that BEASST consistently outperforms state-of-the-art methods, achieving 15% reduction in path length and 20% faster source localization through intelligent uncertainty-driven navigation that dynamically transitions between aggressive pursuit and cautious exploration.
Behaviorally Adaptive Multi-Robot Hazard Localization in Failure-Prone, Communication-Denied Environments
Aug 06, 2025



We address the challenge of multi-robot autonomous hazard mapping in high-risk, failure-prone, communication-denied environments such as post-disaster zones, underground mines, caves, and planetary surfaces. In these missions, robots must explore and map hazards while minimizing the risk of failure due to environmental threats or hardware limitations. We introduce a behavior-adaptive, information-theoretic planning framework for multi-robot teams grounded in the concept of Behavioral Entropy (BE), that generalizes Shannon entropy (SE) to capture diverse human-like uncertainty evaluations. Building on this formulation, we propose the Behavior-Adaptive Path Planning (BAPP) framework, which modulates information gathering strategies via a tunable risk-sensitivity parameter, and present two planning algorithms: BAPP-TID for intelligent triggering of high-fidelity robots, and BAPP-SIG for safe deployment under high risk. We provide theoretical insights on the informativeness of the proposed BAPP framework and validate its effectiveness through both single-robot and multi-robot simulations. Our results show that the BAPP stack consistently outperforms Shannon-based and random strategies: BAPP-TID accelerates entropy reduction, while BAPP-SIG improves robot survivability with minimal loss in information gain. In multi-agent deployments, BAPP scales effectively through spatial partitioning, mobile base relocation, and role-aware heterogeneity. These findings underscore the value of behavior-adaptive planning for robust, risk-sensitive exploration in complex, failure-prone environments.
Behavioral Entropy-Guided Dataset Generation for Offline Reinforcement Learning
Feb 06, 2025Entropy-based objectives are widely used to perform state space exploration in reinforcement learning (RL) and dataset generation for offline RL. Behavioral entropy (BE), a rigorous generalization of classical entropies that incorporates cognitive and perceptual biases of agents, was recently proposed for discrete settings and shown to be a promising metric for robotic exploration problems. In this work, we propose using BE as a principled exploration objective for systematically generating datasets that provide diverse state space coverage in complex, continuous, potentially high-dimensional domains. To achieve this, we extend the notion of BE to continuous settings, derive tractable $k$-nearest neighbor estimators, provide theoretical guarantees for these estimators, and develop practical reward functions that can be used with standard RL methods to learn BE-maximizing policies. Using standard MuJoCo environments, we experimentally compare the performance of offline RL algorithms for a variety of downstream tasks on datasets generated using BE, R\'{e}nyi, and Shannon entropy-maximizing policies, as well as the SMM and RND algorithms. We find that offline RL algorithms trained on datasets collected using BE outperform those trained on datasets collected using Shannon entropy, SMM, and RND on all tasks considered, and on 80% of the tasks compared to datasets collected using R\'{e}nyi entropy.
Robotic Exploration using Generalized Behavioral Entropy
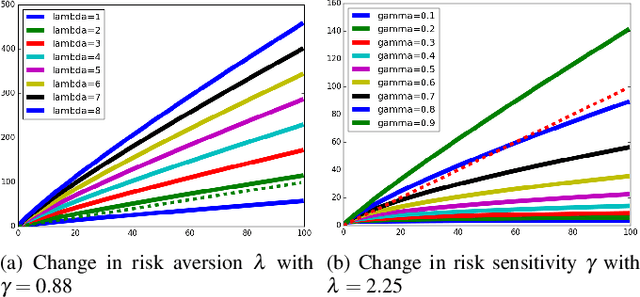
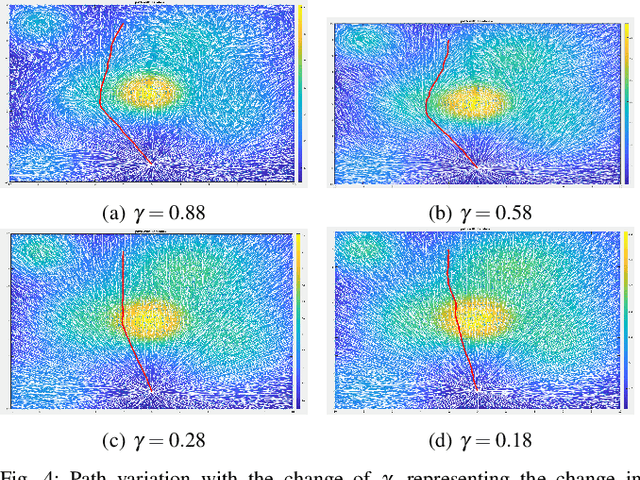
Feb 15, 2024This work presents and evaluates a novel strategy for robotic exploration that leverages human models of uncertainty perception. To do this, we introduce a measure of uncertainty that we term ``Behavioral entropy'', which builds on Prelec's probability weighting from Behavioral Economics. We show that the new operator is an admissible generalized entropy, analyze its theoretical properties and compare it with other common formulations such as Shannon's and Renyi's. In particular, we discuss how the new formulation is more expressive in the sense of measures of sensitivity and perceptiveness to uncertainty introduced here. Then we use Behavioral entropy to define a new type of utility function that can guide a frontier-based environment exploration process. The approach's benefits are illustrated and compared in a Proof-of-Concept and ROS-unity simulation environment with a Clearpath Warthog robot. We show that the robot equipped with Behavioral entropy explores faster than Shannon and Renyi entropies.
Robot Navigation in Risky, Crowded Environments: Understanding Human Preferences
Mar 15, 2023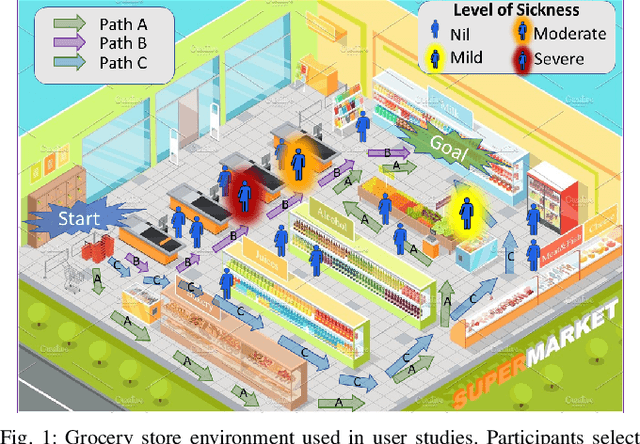
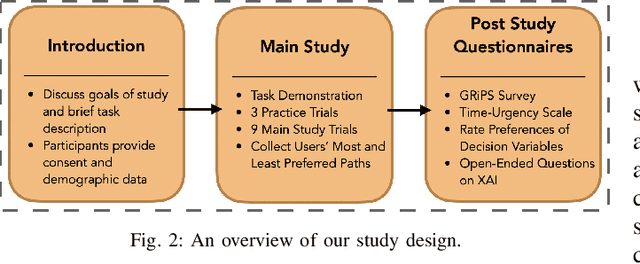
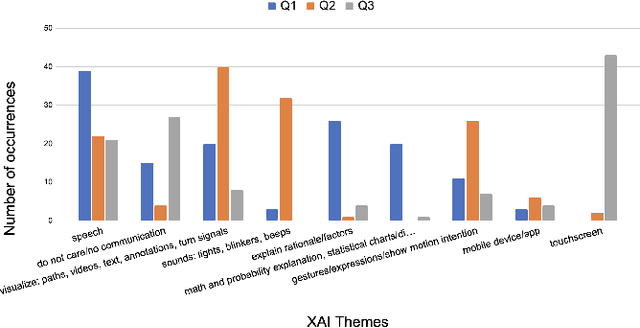
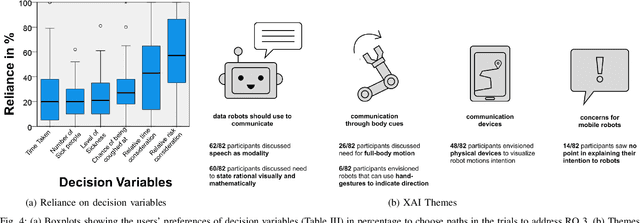
Risky and crowded environments (RCE) contain abstract sources of risk and uncertainty, which are perceived differently by humans, leading to a variety of behaviors. Thus, robots deployed in RCEs, need to exhibit diverse perception and planning capabilities in order to interpret other human agents' behavior and act accordingly in such environments. To understand this problem domain, we conducted a study to explore human path choices in RCEs, enabling better robotic navigational explainable AI (XAI) designs. We created a novel COVID-19 pandemic grocery shopping scenario which had time-risk tradeoffs, and acquired users' path preferences. We found that participants showcase a variety of path preferences: from risky and urgent to safe and relaxed. To model users' decision making, we evaluated three popular risk models (Cumulative Prospect Theory (CPT), Conditional Value at Risk (CVAR), and Expected Risk (ER). We found that CPT captured people's decision making more accurately than CVaR and ER, corroborating theoretical results that CPT is more expressive and inclusive than CVaR and ER. We also found that people's self assessments of risk and time-urgency do not correlate with their path preferences in RCEs. Finally, we conducted thematic analysis of open-ended questions, providing crucial design insights for robots is RCE. Thus, through this study, we provide novel and critical insights about human behavior and perception to help design better navigational explainable AI (XAI) in RCEs.
Risk-perception-aware control design under dynamic spatial risks
Sep 09, 2021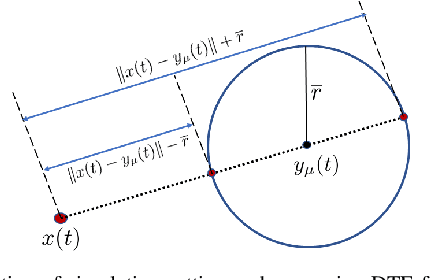
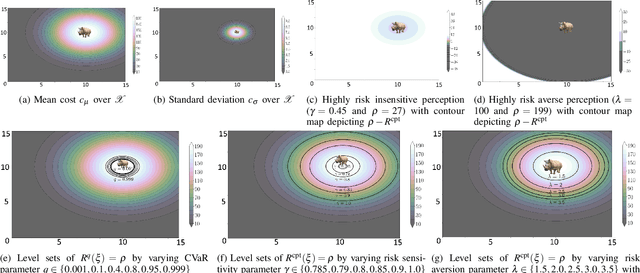
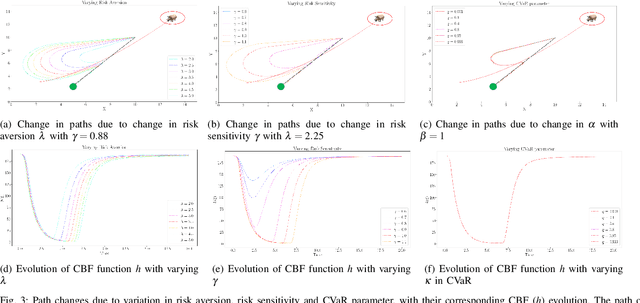

This work proposes a novel risk-perception-aware (RPA) control design using non-rational perception of risks associated with uncertain dynamic spatial costs. We use Cumulative Prospect Theory (CPT) to model the risk perception of a decision maker (DM) and use it to construct perceived risk functions that transform the uncertain dynamic spatial cost to deterministic perceived risks of a DM. These risks are then used to build safety sets which can represent risk-averse to risk-insensitive perception. We define a notions of "inclusiveness" and "versatility" based on safety sets and use it to compare with other models such as Conditional value at Risk (CVaR) and Expected risk (ER). We theoretically prove that CPT is the most "inclusive" and "versatile" model of the lot in the context of risk-perception-aware controls. We further use the perceived risk function along with ideas from control barrier functions (CBF) to construct a class of perceived risk CBFs. For a class of truncated-Gaussian costs, we find sufficient geometric conditions for the validity of this class of CBFs, thus guaranteeing safety. Then, we generate perceived-safety-critical controls using a Quadratic program (QP) to guide an agent safely according to a given perceived risk model. We present simulations in a 2D environment to illustrate the performance of the proposed controller.
Planning under risk and uncertainty based on Prospect-theoretic models
Apr 05, 2019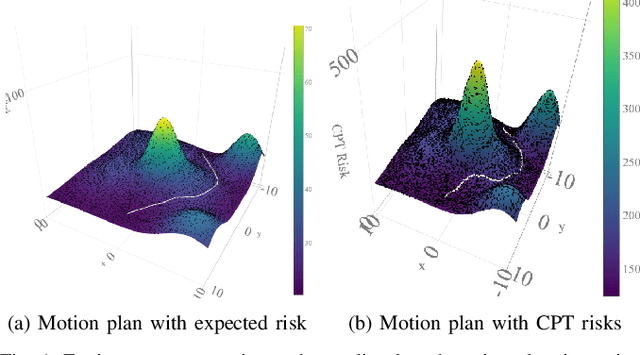

In this work, we develop a novel sampling-based motion planing approach to generate plans in a risky and uncertain environment. To model a variety of risk-sensitivity profiles, we propose an adaption of Cumulative Prospect Theory (CPT) to the setting of path planning. This leads to the definition of a non-rational continuous cost envelope (as well as a continuous uncertainty envelope) associated with an obstacle environment. We use these metrics along with standard costs like path length to formulate path planning problems. Building on RRT*, we then develop a sampling-based motion planner that generates desirable paths from the perspective of a given risk sensitive profile. Since risk sensitivity can greatly vary, we provide a tuning knob to appease a diversity of decision makers (DM), ranging from totally risk-averse to risk-indifferent. Additionally, we adapt a Simultaneous Perturbation Stochastic Approximation (SPSA)-based algorithm to learn the CPT parameters that can best represent a certain DM. Simulations are presented in a 2D environment to evaluate the modeling approach and algorithm's performance.
Gesture based Human-Swarm Interactions for Formation Control using interpreters
Apr 23, 2018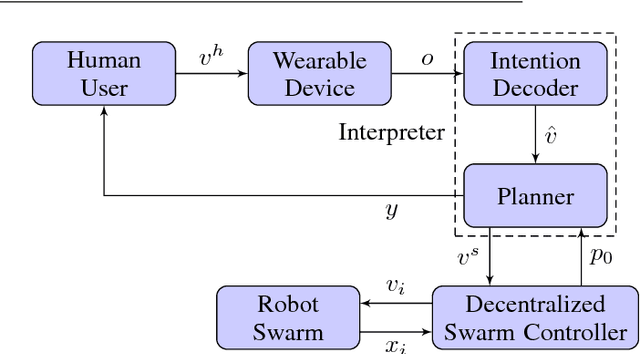

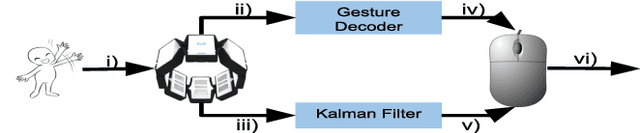
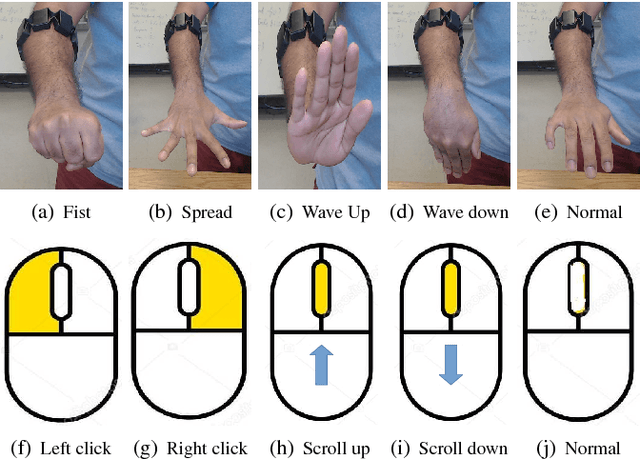
We propose a novel Human-Swarm Interaction (HSI) framework which enables the user to control a swarm shape and formation. The user commands the swarm utilizing just arm gestures and motions which are recorded by an off-the-shelf wearable armband. We propose a novel interpreter system, which acts as an intermediary between the user and the swarm to simplify the user's role in the interaction. The interpreter takes in a high level input drawn using gestures by the user, and translates it into low level swarm control commands. This interpreter employs machine learning, Kalman filtering and optimal control techniques to translate the user input into swarm control parameters. A notion of Human Interpretable dynamics is introduced, which is used by the interpreter for planning as well as to provide feedback to the user. The dynamics of the swarm are controlled using a novel decentralized formation controller based on distributed linear iterations and dynamic average consensus. The framework is demonstrated theoretically as well as experimentally in a 2D environment, with a human controlling a swarm of simulated robots in real time.