 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Considerate Embodied AI: Co-Designing Situated Multi-Site Healthcare Robots from Abstract Concepts to High-Fidelity Prototypes
Feb 03, 2026Co-design is essential for grounding embodied artificial intelligence (AI) systems in real-world contexts, especially high-stakes domains such as healthcare. While prior work has explored multidisciplinary collaboration, iterative prototyping, and support for non-technical participants, few have interwoven these into a sustained co-design process. Such efforts often target one context and low-fidelity stages, limiting the generalizability of findings and obscuring how participants' ideas evolve. To address these limitations, we conducted a 14-week workshop with a multidisciplinary team of 22 participants, centered around how embodied AI can reduce non-value-added task burdens in three healthcare settings: emergency departments, long-term rehabilitation facilities, and sleep disorder clinics. We found that the iterative progression from abstract brainstorming to high-fidelity prototypes, supported by educational scaffolds, enabled participants to understand real-world trade-offs and generate more deployable solutions. We propose eight guidelines for co-designing more considerate embodied AI: attuned to context, responsive to social dynamics, mindful of expectations, and grounded in deployment. Project Page: https://byc-sophie.github.io/Towards-Considerate-Embodied-AI/
Fair-GNE : Generalized Nash Equilibrium-Seeking Fairness in Multiagent Healthcare Automation
Nov 18, 2025
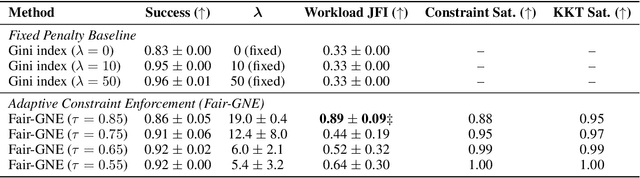
Enforcing a fair workload allocation among multiple agents tasked to achieve an objective in learning enabled demand side healthcare worker settings is crucial for consistent and reliable performance at runtime. Existing multi-agent reinforcement learning (MARL) approaches steer fairness by shaping reward through post hoc orchestrations, leaving no certifiable self-enforceable fairness that is immutable by individual agents at runtime. Contextualized within a setting where each agent shares resources with others, we address this shortcoming with a learning enabled optimization scheme among self-interested decision makers whose individual actions affect those of other agents. This extends the problem to a generalized Nash equilibrium (GNE) game-theoretic framework where we steer group policy to a safe and locally efficient equilibrium, so that no agent can improve its utility function by unilaterally changing its decisions. Fair-GNE models MARL as a constrained generalized Nash equilibrium-seeking (GNE) game, prescribing an ideal equitable collective equilibrium within the problem's natural fabric. Our hypothesis is rigorously evaluated in our custom-designed high-fidelity resuscitation simulator. Across all our numerical experiments, Fair-GNE achieves significant improvement in workload balance over fixed-penalty baselines (0.89 vs.\ 0.33 JFI, $p < 0.01$) while maintaining 86\% task success, demonstrating statistically significant fairness gains through adaptive constraint enforcement. Our results communicate our formulations, evaluation metrics, and equilibrium-seeking innovations in large multi-agent learning-based healthcare systems with clarity and principled fairness enforcement.
Skill-Aligned Fairness in Multi-Agent Learning for Collaboration in Healthcare
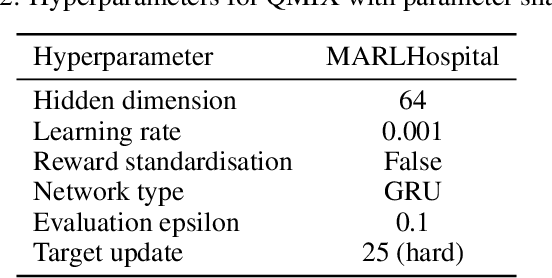
Aug 26, 2025Fairness in multi-agent reinforcement learning (MARL) is often framed as a workload balance problem, overlooking agent expertise and the structured coordination required in real-world domains. In healthcare, equitable task allocation requires workload balance or expertise alignment to prevent burnout and overuse of highly skilled agents. Workload balance refers to distributing an approximately equal number of subtasks or equalised effort across healthcare workers, regardless of their expertise. We make two contributions to address this problem. First, we propose FairSkillMARL, a framework that defines fairness as the dual objective of workload balance and skill-task alignment. Second, we introduce MARLHospital, a customizable healthcare-inspired environment for modeling team compositions and energy-constrained scheduling impacts on fairness, as no existing simulators are well-suited for this problem. We conducted experiments to compare FairSkillMARL in conjunction with four standard MARL methods, and against two state-of-the-art fairness metrics. Our results suggest that fairness based solely on equal workload might lead to task-skill mismatches and highlight the need for more robust metrics that capture skill-task misalignment. Our work provides tools and a foundation for studying fairness in heterogeneous multi-agent systems where aligning effort with expertise is critical.
From MAS to MARS: Coordination Failures and Reasoning Trade-offs in Hierarchical Multi-Agent Robotic Systems within a Healthcare Scenario
Aug 06, 2025Multi-agent robotic systems (MARS) build upon multi-agent systems by integrating physical and task-related constraints, increasing the complexity of action execution and agent coordination. However, despite the availability of advanced multi-agent frameworks, their real-world deployment on robots remains limited, hindering the advancement of MARS research in practice. To bridge this gap, we conducted two studies to investigate performance trade-offs of hierarchical multi-agent frameworks in a simulated real-world multi-robot healthcare scenario. In Study 1, using CrewAI, we iteratively refine the system's knowledge base, to systematically identify and categorize coordination failures (e.g., tool access violations, lack of timely handling of failure reports) not resolvable by providing contextual knowledge alone. In Study 2, using AutoGen, we evaluate a redesigned bidirectional communication structure and further measure the trade-offs between reasoning and non-reasoning models operating within the same robotic team setting. Drawing from our empirical findings, we emphasize the tension between autonomy and stability and the importance of edge-case testing to improve system reliability and safety for future real-world deployment. Supplementary materials, including codes, task agent setup, trace outputs, and annotated examples of coordination failures and reasoning behaviors, are available at: https://byc-sophie.github.io/mas-to-mars/.
Help or Hindrance: Understanding the Impact of Robot Communication in Action Teams
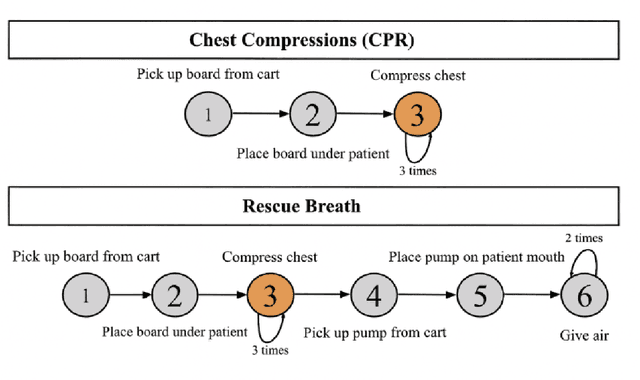
Jun 12, 2025The human-robot interaction (HRI) field has recognized the importance of enabling robots to interact with teams. Human teams rely on effective communication for successful collaboration in time-sensitive environments. Robots can play a role in enhancing team coordination through real-time assistance. Despite significant progress in human-robot teaming research, there remains an essential gap in how robots can effectively communicate with action teams using multimodal interaction cues in time-sensitive environments. This study addresses this knowledge gap in an experimental in-lab study to investigate how multimodal robot communication in action teams affects workload and human perception of robots. We explore team collaboration in a medical training scenario where a robotic crash cart (RCC) provides verbal and non-verbal cues to help users remember to perform iterative tasks and search for supplies. Our findings show that verbal cues for object search tasks and visual cues for task reminders reduce team workload and increase perceived ease of use and perceived usefulness more effectively than a robot with no feedback. Our work contributes to multimodal interaction research in the HRI field, highlighting the need for more human-robot teaming research to understand best practices for integrating collaborative robots in time-sensitive environments such as in hospitals, search and rescue, and manufacturing applications.
Human-Robot Teaming Field Deployments: A Comparison Between Verbal and Non-verbal Communication
Jun 10, 2025Healthcare workers (HCWs) encounter challenges in hospitals, such as retrieving medical supplies quickly from crash carts, which could potentially result in medical errors and delays in patient care. Robotic crash carts (RCCs) have shown promise in assisting healthcare teams during medical tasks through guided object searches and task reminders. Limited exploration has been done to determine what communication modalities are most effective and least disruptive to patient care in real-world settings. To address this gap, we conducted a between-subjects experiment comparing the RCC's verbal and non-verbal communication of object search with a standard crash cart in resuscitation scenarios to understand the impact of robot communication on workload and attitudes toward using robots in the workplace. Our findings indicate that verbal communication significantly reduced mental demand and effort compared to visual cues and with a traditional crash cart. Although frustration levels were slightly higher during collaborations with the robot compared to a traditional cart, these research insights provide valuable implications for human-robot teamwork in high-stakes environments.
Rapidly Built Medical Crash Cart! Lessons Learned and Impacts on High-Stakes Team Collaboration in the Emergency Room
Feb 25, 2025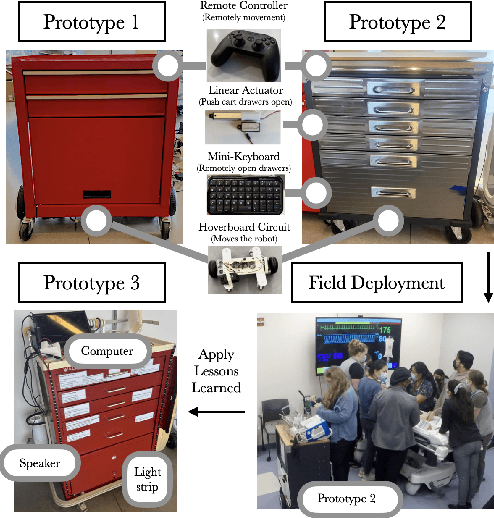
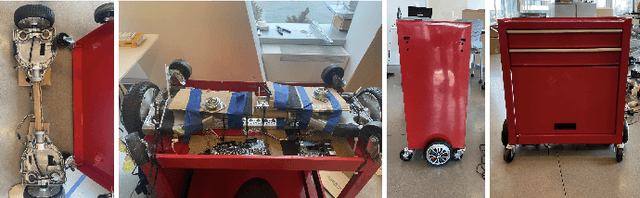
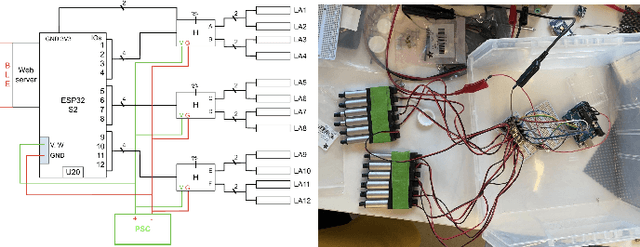
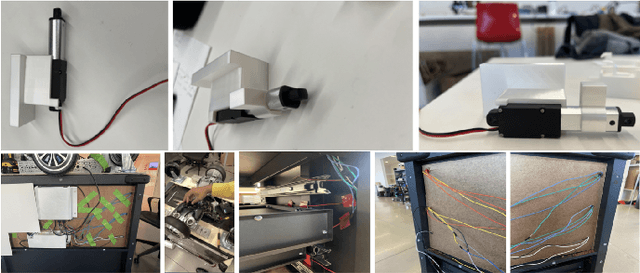
Designing robots to support high-stakes teamwork in emergency settings presents unique challenges, including seamless integration into fast-paced environments, facilitating effective communication among team members, and adapting to rapidly changing situations. While teleoperated robots have been successfully used in high-stakes domains such as firefighting and space exploration, autonomous robots that aid highs-takes teamwork remain underexplored. To address this gap, we conducted a rapid prototyping process to develop a series of seemingly autonomous robot designed to assist clinical teams in the Emergency Room. We transformed a standard crash cart--which stores medical equipment and emergency supplies into a medical robotic crash cart (MCCR). The MCCR was evaluated through field deployments to assess its impact on team workload and usability, identified taxonomies of failure, and refined the MCCR in collaboration with healthcare professionals. Our work advances the understanding of robot design for high-stakes, time-sensitive settings, providing insights into useful MCCR capabilities and considerations for effective human-robot collaboration. By publicly disseminating our MCCR tutorial, we hope to encourage HRI researchers to explore the design of robots for high-stakes teamwork.
Co-Designing Augmented Reality Tools for High-Stakes Clinical Teamwork
Feb 24, 2025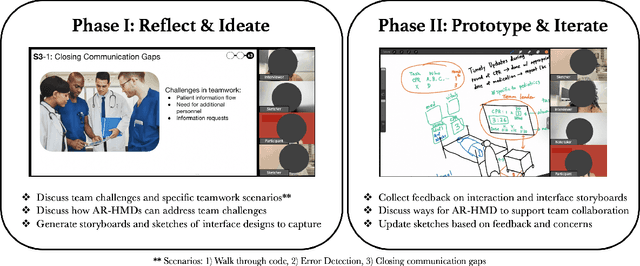

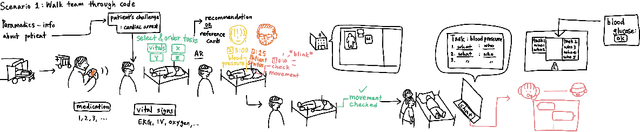
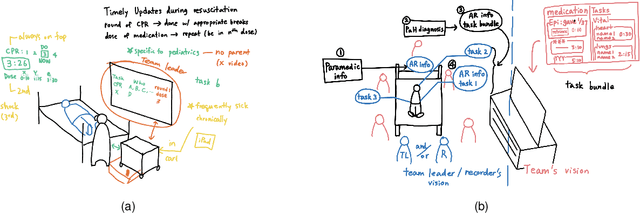
How might healthcare workers (HCWs) leverage augmented reality head-mounted displays (AR-HMDs) to enhance teamwork? Although AR-HMDs have shown immense promise in supporting teamwork in healthcare settings, design for Emergency Department (ER) teams has received little attention. The ER presents unique challenges, including procedural recall, medical errors, and communication gaps. To address this gap, we engaged in a participatory design study with healthcare workers to gain a deep understanding of the potential for AR-HMDs to facilitate teamwork during ER procedures. Our results reveal that AR-HMDs can be used as an information-sharing and information-retrieval system to bridge knowledge gaps, and concerns about integrating AR-HMDs in ER workflows. We contribute design recommendations for seven role-based AR-HMD application scenarios involving HCWs with various expertise, working across multiple medical tasks. We hope our research inspires designers to embark on the development of new AR-HMD applications for high-stakes, team environments.
Robot Navigation in Risky, Crowded Environments: Understanding Human Preferences
Mar 15, 2023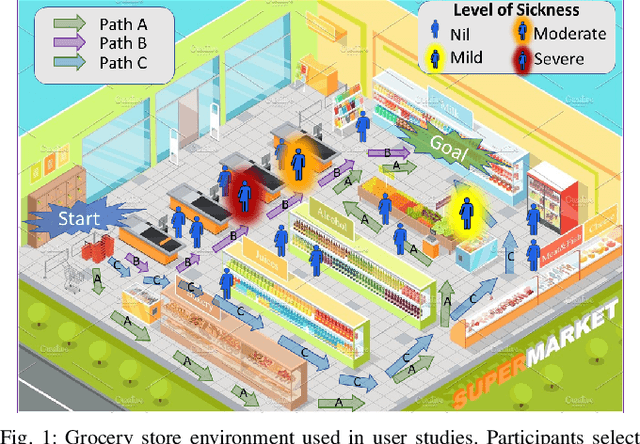
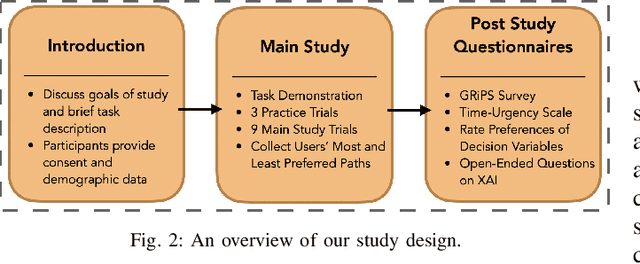
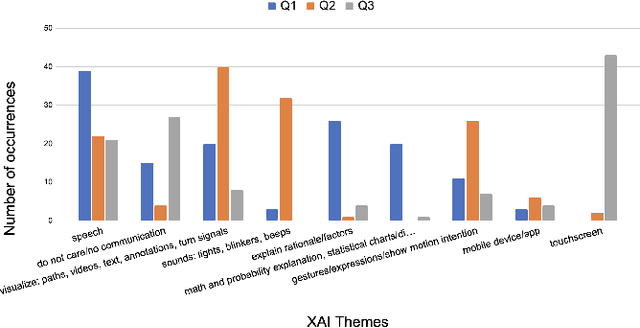
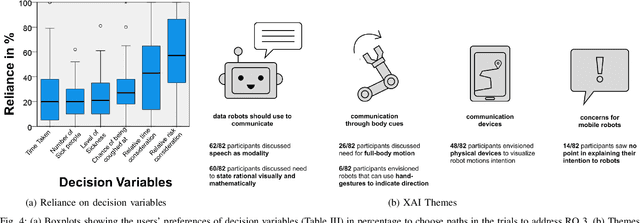
Risky and crowded environments (RCE) contain abstract sources of risk and uncertainty, which are perceived differently by humans, leading to a variety of behaviors. Thus, robots deployed in RCEs, need to exhibit diverse perception and planning capabilities in order to interpret other human agents' behavior and act accordingly in such environments. To understand this problem domain, we conducted a study to explore human path choices in RCEs, enabling better robotic navigational explainable AI (XAI) designs. We created a novel COVID-19 pandemic grocery shopping scenario which had time-risk tradeoffs, and acquired users' path preferences. We found that participants showcase a variety of path preferences: from risky and urgent to safe and relaxed. To model users' decision making, we evaluated three popular risk models (Cumulative Prospect Theory (CPT), Conditional Value at Risk (CVAR), and Expected Risk (ER). We found that CPT captured people's decision making more accurately than CVaR and ER, corroborating theoretical results that CPT is more expressive and inclusive than CVaR and ER. We also found that people's self assessments of risk and time-urgency do not correlate with their path preferences in RCEs. Finally, we conducted thematic analysis of open-ended questions, providing crucial design insights for robots is RCE. Thus, through this study, we provide novel and critical insights about human behavior and perception to help design better navigational explainable AI (XAI) in RCEs.