 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapidly Built Medical Crash Cart! Lessons Learned and Impacts on High-Stakes Team Collaboration in the Emergency Room
Feb 25, 2025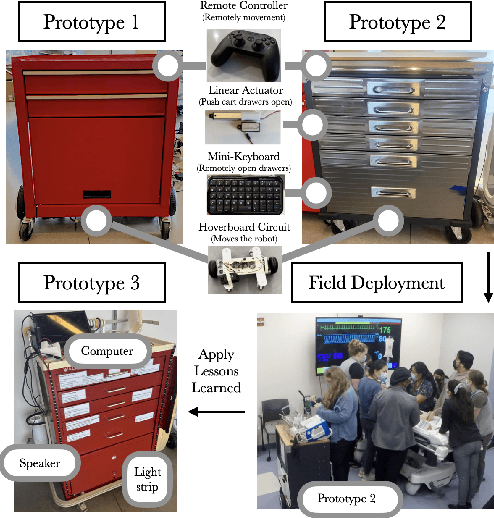
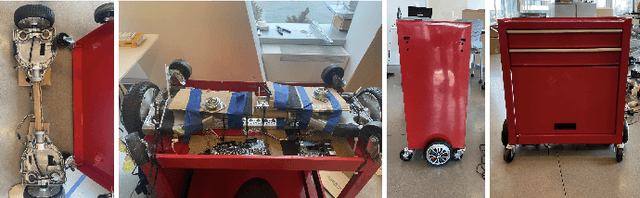
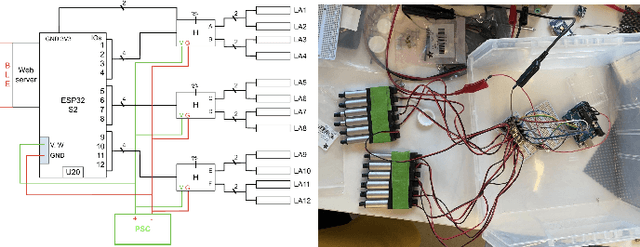
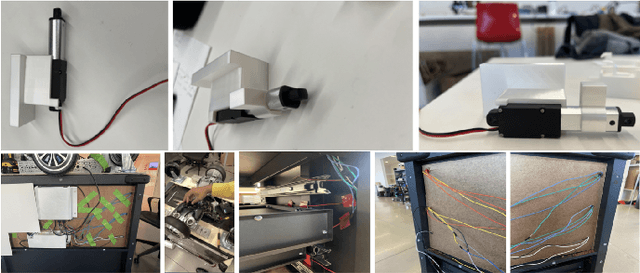
Designing robots to support high-stakes teamwork in emergency settings presents unique challenges, including seamless integration into fast-paced environments, facilitating effective communication among team members, and adapting to rapidly changing situations. While teleoperated robots have been successfully used in high-stakes domains such as firefighting and space exploration, autonomous robots that aid highs-takes teamwork remain underexplored. To address this gap, we conducted a rapid prototyping process to develop a series of seemingly autonomous robot designed to assist clinical teams in the Emergency Room. We transformed a standard crash cart--which stores medical equipment and emergency supplies into a medical robotic crash cart (MCCR). The MCCR was evaluated through field deployments to assess its impact on team workload and usability, identified taxonomies of failure, and refined the MCCR in collaboration with healthcare professionals. Our work advances the understanding of robot design for high-stakes, time-sensitive settings, providing insights into useful MCCR capabilities and considerations for effective human-robot collaboration. By publicly disseminating our MCCR tutorial, we hope to encourage HRI researchers to explore the design of robots for high-stakes teamwork.
Social Mediation through Robots -- A Scoping Review on Improving Group Interactions through Directed Robot Action using an Extended Group Process Model
Sep 10, 2024



Group processes refer to the dynamics that occur within a group and are critical for understanding how groups function. With robots being increasingly placed within small groups, improving these processes has emerged as an important application of social robotics. Social Mediation Robots elicit behavioral change within groups by deliberately influencing the processes of groups. While research in this field has demonstrated that robots can effectively affect interpersonal dynamics, there is a notable gap in integrating these insights to develop coherent understanding and theory. We present a scoping review of literature targeting changes in social interactions between multiple humans through intentional action from robotic agents. To guide our review, we adapt the classical Input-Process-Output (I-P-O) models that we call "Mediation I-P-O model". We evaluated 1633 publications, which yielded 89 distinct social mediation concepts. We construct 11 mediation approaches robots can use to shape processes in small groups and teams. This work strives to produce generalizable insights and evaluate the extent to which the potential of social mediation through robots has been realized thus far. We hope that the proposed framework encourages a holistic approach to the study of social mediation and provides a foundation to standardize future reporting in the domain.
Robot Assisted Tower Construction - A Resource Distribution Task to Study Human-Robot Collaboration and Interaction with Groups of People
Dec 22, 2018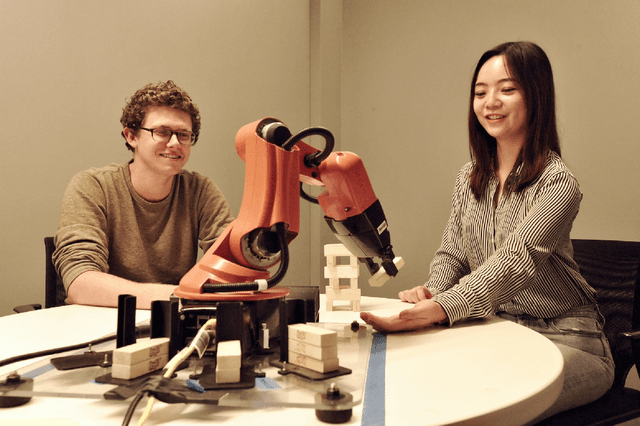

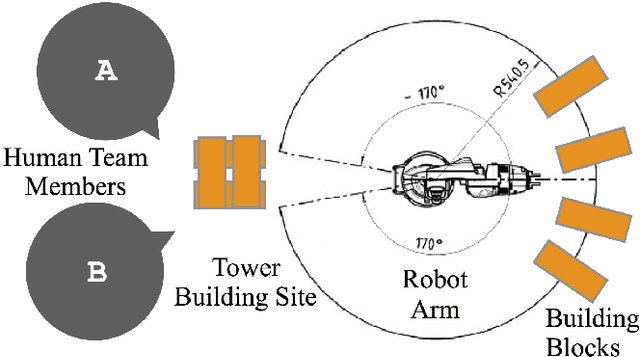

Research on human-robot collaboration or human-robot teaming, has focused predominantly on understanding and enabling collaboration between a single robot and a single human. Extending human-robot collaboration research beyond the dyad, raises novel questions about how a robot should distribute resources among group members and about what the social and task related consequences of the distribution are. Methodological advances are needed to allow researchers to collect data about human robot collaboration that involves multiple people. This paper presents Tower Construction, a novel resource distribution task that allows researchers to examine collaboration between a robot and groups of people. By focusing on the question of whether and how a robot's distribution of resources (wooden blocks required for a building task) affects collaboration dynamics and outcomes, we provide a case of how this task can be applied in a laboratory study with 124 participants to collect data about human robot collaboration that involves multiple humans. We highlight the kinds of insights the task can yield. In particular we find that the distribution of resources affects perceptions of performance, and interpersonal dynamics between human team-members.