 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapidly Built Medical Crash Cart! Lessons Learned and Impacts on High-Stakes Team Collaboration in the Emergency Room
Feb 25, 2025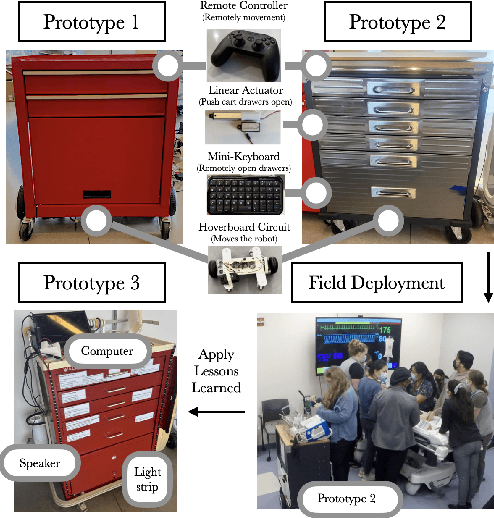
Designing robots to support high-stakes teamwork in emergency settings presents unique challenges, including seamless integration into fast-paced environments, facilitating effective communication among team members, and adapting to rapidly changing situations. While teleoperated robots have been successfully used in high-stakes domains such as firefighting and space exploration, autonomous robots that aid highs-takes teamwork remain underexplored. To address this gap, we conducted a rapid prototyping process to develop a series of seemingly autonomous robot designed to assist clinical teams in the Emergency Room. We transformed a standard crash cart--which stores medical equipment and emergency supplies into a medical robotic crash cart (MCCR). The MCCR was evaluated through field deployments to assess its impact on team workload and usability, identified taxonomies of failure, and refined the MCCR in collaboration with healthcare professionals. Our work advances the understanding of robot design for high-stakes, time-sensitive settings, providing insights into useful MCCR capabilities and considerations for effective human-robot collaboration. By publicly disseminating our MCCR tutorial, we hope to encourage HRI researchers to explore the design of robots for high-stakes teamwork.