 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Mediation through Robots -- A Scoping Review on Improving Group Interactions through Directed Robot Action using an Extended Group Process Model
Sep 10, 2024



Group processes refer to the dynamics that occur within a group and are critical for understanding how groups function. With robots being increasingly placed within small groups, improving these processes has emerged as an important application of social robotics. Social Mediation Robots elicit behavioral change within groups by deliberately influencing the processes of groups. While research in this field has demonstrated that robots can effectively affect interpersonal dynamics, there is a notable gap in integrating these insights to develop coherent understanding and theory. We present a scoping review of literature targeting changes in social interactions between multiple humans through intentional action from robotic agents. To guide our review, we adapt the classical Input-Process-Output (I-P-O) models that we call "Mediation I-P-O model". We evaluated 1633 publications, which yielded 89 distinct social mediation concepts. We construct 11 mediation approaches robots can use to shape processes in small groups and teams. This work strives to produce generalizable insights and evaluate the extent to which the potential of social mediation through robots has been realized thus far. We hope that the proposed framework encourages a holistic approach to the study of social mediation and provides a foundation to standardize future reporting in the domain.
"How Did They Come Across?" Lessons Learned from Continuous Affective Ratings
Jul 07, 2023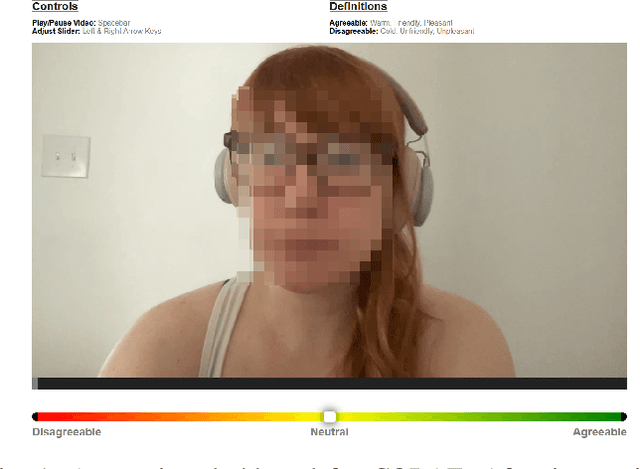
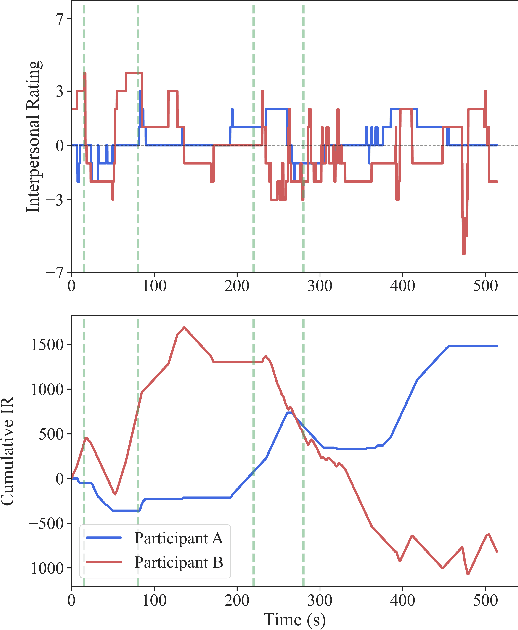
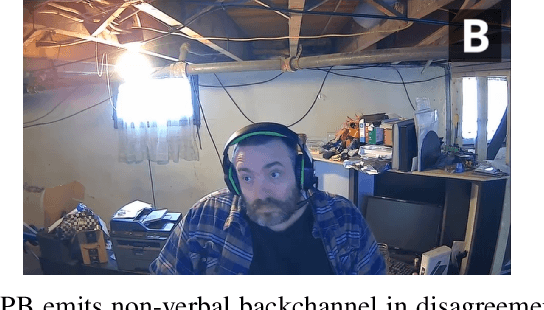
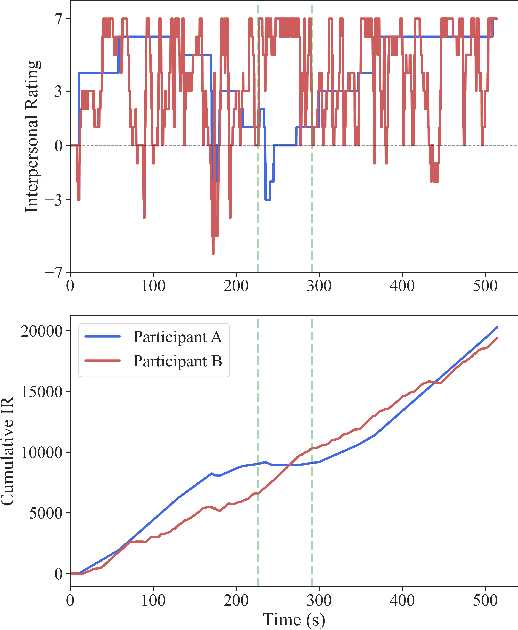
Social distance, or perception of the other, is recognized as a dynamic dimension of an interaction, but yet to be widely explored or understood. Through CORAE, a novel web-based open-source tool for COntinuous Retrospective Affect Evaluation, we collected retrospective ratings of interpersonal perceptions between 12 participant dyads. In this work, we explore how different aspects of these interactions reflect on the ratings collected, through a discourse analysis of individual and social behavior of the interactants. We found that different events observed in the ratings can be mapped to complex interaction phenomena, shedding light on relevant interaction features that may play a role in interpersonal understanding and grounding. This paves the way for better, more seamless human-robot interactions, where affect is interpreted as highly dynamic and contingent on interaction history.
* arXiv admin note: substantial text overlap with arXiv:2306.16629
What Could a Social Mediator Robot Do? Lessons from Real-World Mediation Scenarios
Jun 30, 2023

The use of social robots as instruments for social mediation has been gaining traction in the field of Human-Robot Interaction (HRI). So far, the design of such robots and their behaviors is often driven by technological platforms and experimental setups in controlled laboratory environments. To address complex social relationships in the real world, it is crucial to consider the actual needs and consequences of the situations found therein. This includes understanding when a mediator is necessary, what specific role such a robot could play, and how it moderates human social dynamics. In this paper, we discuss six relevant roles for robotic mediators that we identified by investigating a collection of videos showing realistic group situations. We further discuss mediation behaviors and target measures to evaluate the success of such interventions. We hope that our findings can inspire future research on robot-assisted social mediation by highlighting a wider set of mediation applications than those found in prior studies. Specifically, we aim to inform the categorization and selection of interaction scenarios that reflect real situations, where a mediation robot can have a positive and meaningful impact on group dynamics.
Group Dynamics: Survey of Existing Multimodal Models and Considerations for Social Mediation
Jun 30, 2023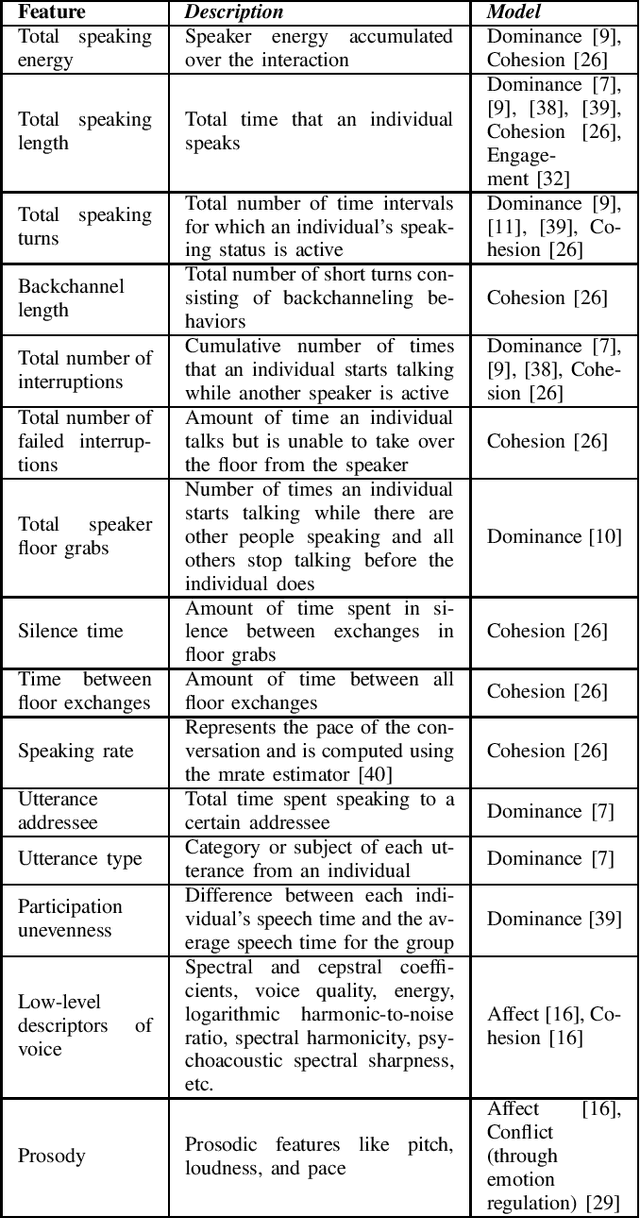
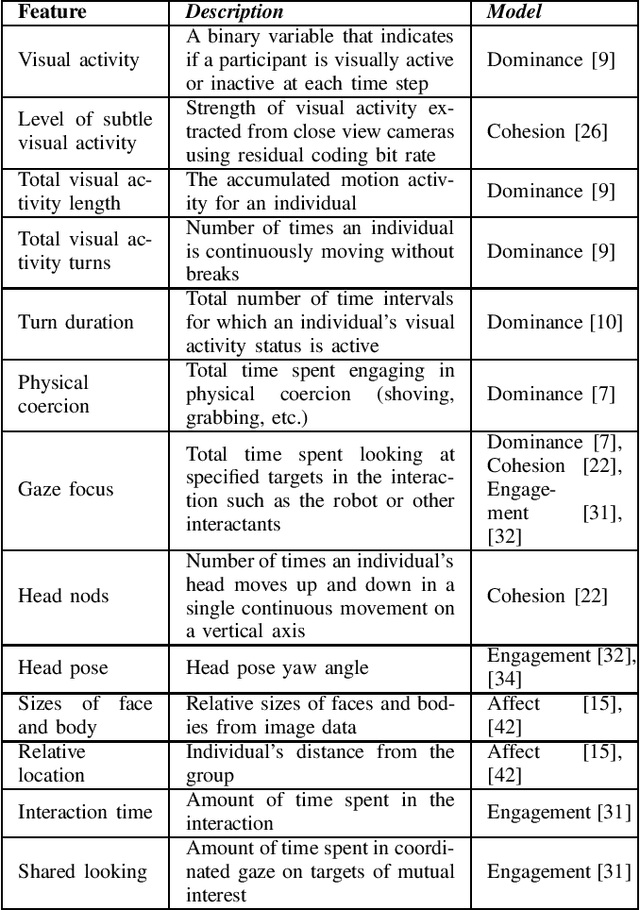
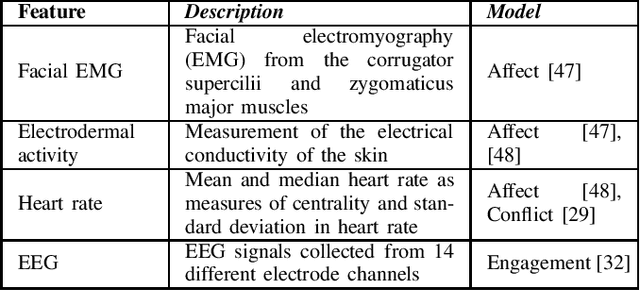
Social mediator robots facilitate human-human interactions by producing behavior strategies that positively influence how humans interact with each other in social settings. As robots for social mediation gain traction in the field of human-human-robot interaction, their ability to "understand" the humans in their environments becomes crucial. This objective requires models of human understanding that consider multiple humans in an interaction as a collective entity and represent the group dynamics that exist among its members. Group dynamics are defined as the influential actions, processes, and changes that occur within and between group interactants. Since an individual's behavior may be deeply influenced by their interactions with other group members, the social dynamics existing within a group can influence the behaviors, attitudes, and opinions of each individual and the group as a whole. Therefore, models of group dynamics are critical for a social mediator robot to be effective in its role. In this paper, we survey existing models of group dynamics and categorize them into models of social dominance, affect, social cohesion, conflict resolution, and engagement. We highlight the multimodal features these models utilize, and emphasize the importance of capturing the interpersonal aspects of a social interaction. Finally, we make a case for models of relational affect as an approach that may be able to capture a representation of human-human interactions that can be useful for social mediation.
Modeling Group Dynamics for Personalized Robot-Mediated Interactions
Jun 29, 2023The field of human-human-robot interaction (HHRI) uses social robots to positively influence how humans interact with each other. This objective requires models of human understanding that consider multiple humans in an interaction as a collective entity and represent the group dynamics that exist within it. Understanding group dynamics is important because these can influence the behaviors, attitudes, and opinions of each individual within the group, as well as the group as a whole. Such an understanding is also useful when personalizing an interaction between a robot and the humans in its environment, where a group-level model can facilitate the design of robot behaviors that are tailored to a given group, the dynamics that exist within it, and the specific needs and preferences of the individual interactants. In this paper, we highlight the need for group-level models of human understanding in human-human-robot interaction research and how these can be useful in developing personalization techniques. We survey existing models of group dynamics and categorize them into models of social dominance, affect, social cohesion, and conflict resolution. We highlight the important features these models utilize, evaluate their potential to capture interpersonal aspects of a social interaction, and highlight their value for personalization techniques. Finally, we identify directions for future work, and make a case for models of relational affect as an approach that can better capture group-level understanding of human-human interactions and be useful in personalizing human-human-robot interactions.
An Interactive Robotic Framework to Facilitate Sensory Experiences for Children with ASD
Jan 03, 2019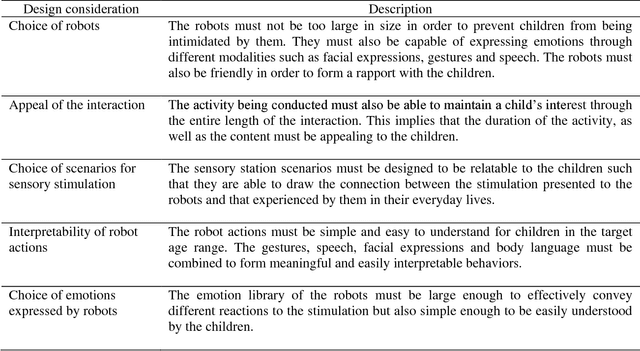

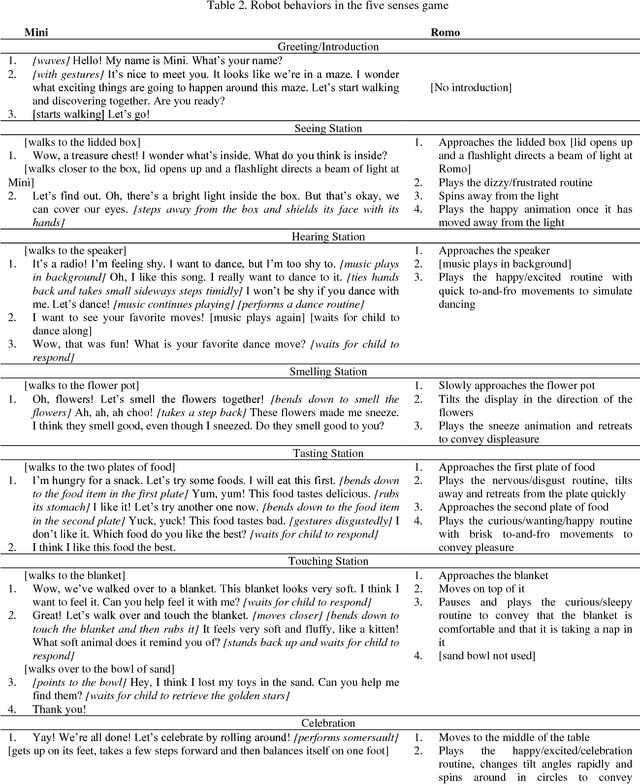
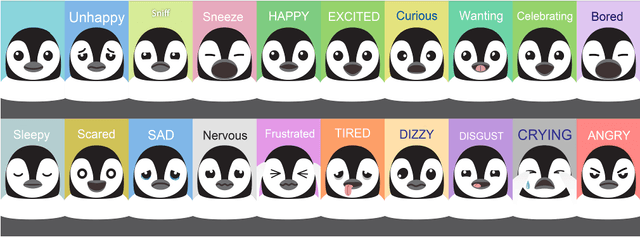
The diagnosis of Autism Spectrum Disorder (ASD) in children is commonly accompanied by a diagnosis of sensory processing disorders as well. Abnormalities are usually reported in multiple sensory processing domains, showing a higher prevalence of unusual responses, particularly to tactile, auditory and visual stimuli. This paper discusses a novel robot-based framework designed to target sensory difficulties faced by children with ASD in a controlled setting. The setup consists of a number of sensory stations, together with robotic agents that navigate the stations and interact with the stimuli as they are presented. These stimuli are designed to resemble real world scenarios that form a common part of one's everyday experiences. Given the strong interest of children with ASD in technology in general and robots in particular, we attempt to utilize our robotic platform to demonstrate socially acceptable responses to the stimuli in an interactive, pedagogical setting that encourages the child's social, motor and vocal skills, while providing a diverse sensory experience. A user study was conducted to evaluate the efficacy of the proposed framework, with a total of 18 participants (5 with ASD and 13 typically developing) between the ages of 4 and 12 years. We describe our methods of data collection, coding of video data and the analysis of the results obtained from the study. We also discuss the limitations of the current work and detail our plans for the future work to improve the validity of the obtained results.
Why robots? A survey on the roles and benefits of social robots in the therapy of children with autism
Nov 02, 2013This paper reviews the use of socially interactive robots to assist in the therapy of children with autism. The extent to which the robots were successful in helping the children in their social, emotional, and communication deficits was investigated. Child-robot interactions were scrutinized with respect to the different target behaviors that are to be elicited from a child during therapy. These behaviors were thoroughly examined with respect to a childs development needs. Most importantly, experimental data from the surveyed works were extracted and analyzed in terms of the target behaviors and how each robot was used during a therapy session to achieve these behaviors. The study concludes by categorizing the different therapeutic roles that these robots were observed to play, and highlights the important design features that enable them to achieve high levels of effectiveness in autism therapy.