 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Mediation through Robots -- A Scoping Review on Improving Group Interactions through Directed Robot Action using an Extended Group Process Model
Sep 10, 2024



Group processes refer to the dynamics that occur within a group and are critical for understanding how groups function. With robots being increasingly placed within small groups, improving these processes has emerged as an important application of social robotics. Social Mediation Robots elicit behavioral change within groups by deliberately influencing the processes of groups. While research in this field has demonstrated that robots can effectively affect interpersonal dynamics, there is a notable gap in integrating these insights to develop coherent understanding and theory. We present a scoping review of literature targeting changes in social interactions between multiple humans through intentional action from robotic agents. To guide our review, we adapt the classical Input-Process-Output (I-P-O) models that we call "Mediation I-P-O model". We evaluated 1633 publications, which yielded 89 distinct social mediation concepts. We construct 11 mediation approaches robots can use to shape processes in small groups and teams. This work strives to produce generalizable insights and evaluate the extent to which the potential of social mediation through robots has been realized thus far. We hope that the proposed framework encourages a holistic approach to the study of social mediation and provides a foundation to standardize future reporting in the domain.
What Could a Social Mediator Robot Do? Lessons from Real-World Mediation Scenarios
Jun 30, 2023

The use of social robots as instruments for social mediation has been gaining traction in the field of Human-Robot Interaction (HRI). So far, the design of such robots and their behaviors is often driven by technological platforms and experimental setups in controlled laboratory environments. To address complex social relationships in the real world, it is crucial to consider the actual needs and consequences of the situations found therein. This includes understanding when a mediator is necessary, what specific role such a robot could play, and how it moderates human social dynamics. In this paper, we discuss six relevant roles for robotic mediators that we identified by investigating a collection of videos showing realistic group situations. We further discuss mediation behaviors and target measures to evaluate the success of such interventions. We hope that our findings can inspire future research on robot-assisted social mediation by highlighting a wider set of mediation applications than those found in prior studies. Specifically, we aim to inform the categorization and selection of interaction scenarios that reflect real situations, where a mediation robot can have a positive and meaningful impact on group dynamics.
Theory of Mind Based Assistive Communication in Complex Human Robot Cooperation
Sep 03, 2021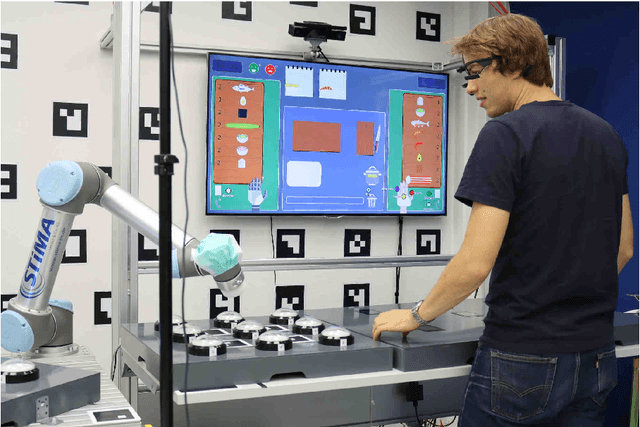
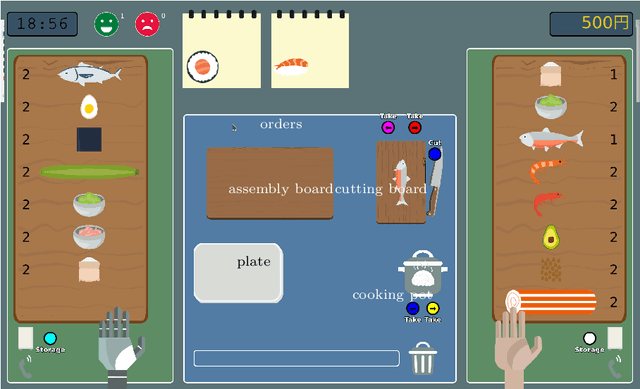
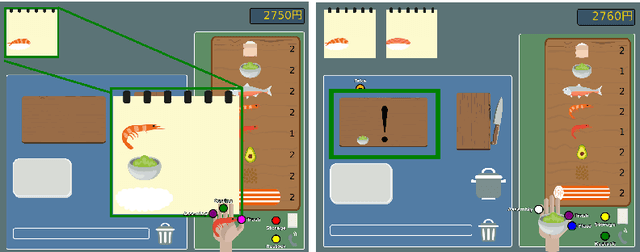
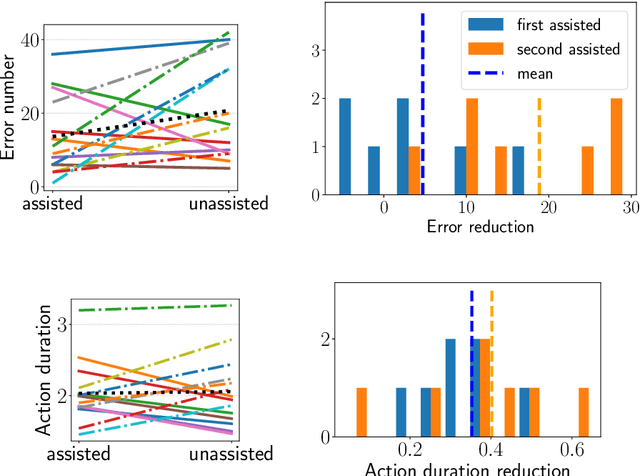
When cooperating with a human, a robot should not only care about its environment and task but also develop an understanding of the partner's reasoning. To support its human partner in complex tasks, the robot can share information that it knows. However simply communicating everything will annoy and distract humans since they might already be aware of and not all information is relevant in the current situation. The questions when and what type of information the human needs, are addressed through the concept of Theory of Mind based Communication which selects information sharing actions based on evaluation of relevance and an estimation of human beliefs. We integrate this into a communication assistant to support humans in a cooperative setting and evaluate performance benefits. We designed a human robot Sushi making task that is challenging for the human and generates different situations where humans are unaware and communication could be beneficial. We evaluate the influence of the human centric communication concept on performance with a user study. Compared to the condition without information exchange, assisted participants can recover from unawareness much earlier. The approach respects the costs of communication and balances interruptions better than other approaches. By providing information adapted to specific situations, the robot does not instruct but enable the human to make good decision.
Human-Vehicle Cooperation on Prediction-Level: Enhancing Automated Driving with Human Foresight
Apr 14, 2021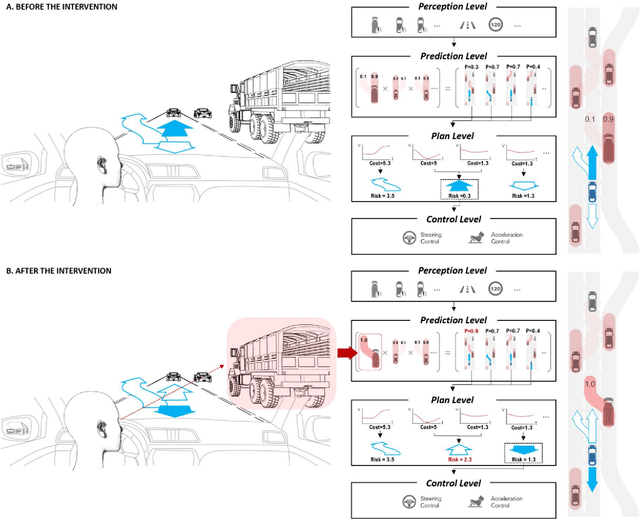
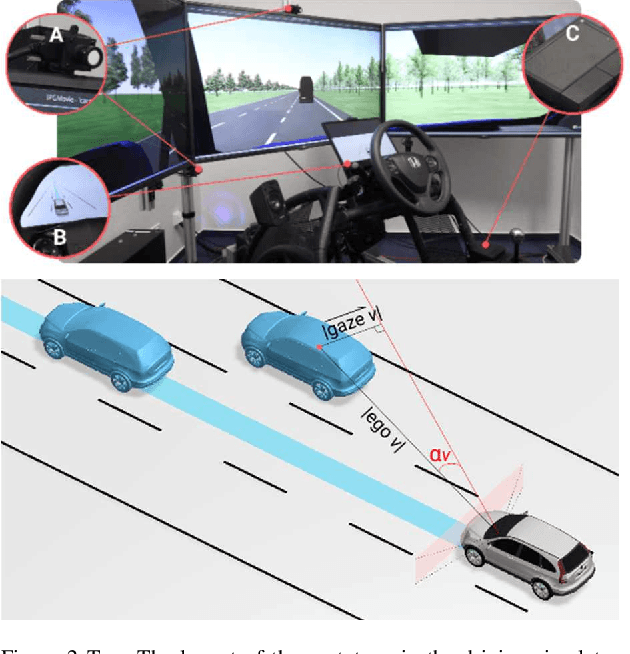
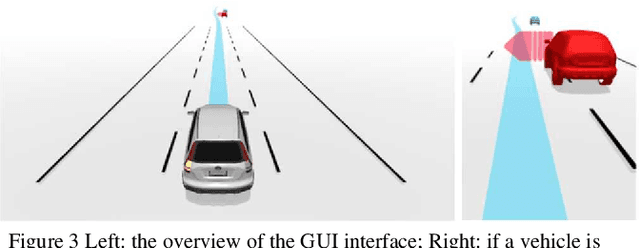
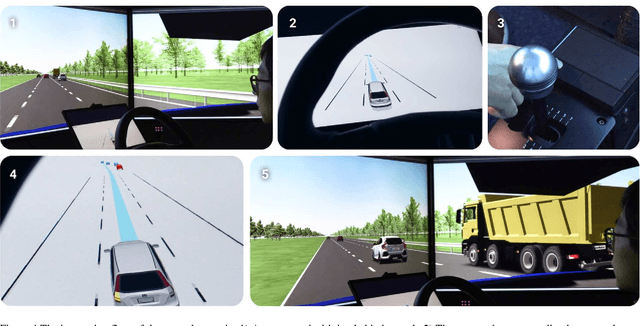
To maximize safety and driving comfort, autonomous driving systems can benefit from implementing foresighted action choices that take different potential scenario developments into account. While artificial scene prediction methods are making fast progress, an attentive human driver may still be able to identify relevant contextual features which are not adequately considered by the system or for which the human driver may have a lack of trust into the system's capabilities to treat them appropriately. We implement an approach that lets a human driver quickly and intuitively supplement scene predictions to an autonomous driving system by gaze. We illustrate the feasibility of this approach in an existing autonomous driving system running a variety of scenarios in a simulator. Furthermore, a Graphical User Interface (GUI) was designed and integrated to enhance the trust and explainability of the system. The utilization of such cooperatively augmented scenario predictions has the potential to improve a system's foresighted driving abilities and make autonomous driving more trustable, comfortable and personalized.