 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTheory of Mind Based Assistive Communication in Complex Human Robot Cooperation
Sep 03, 2021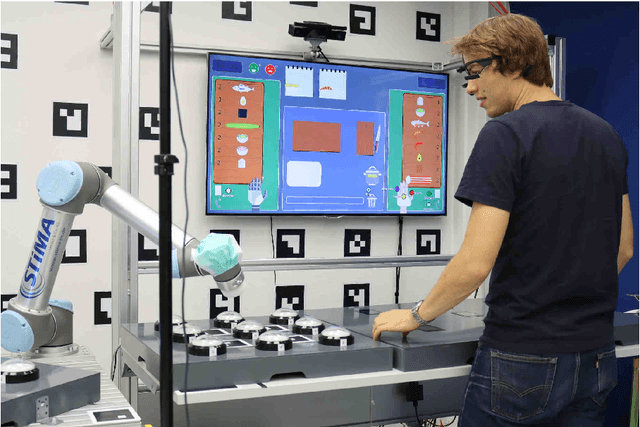
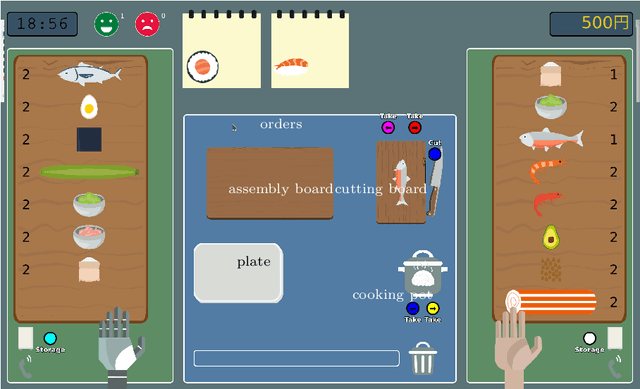
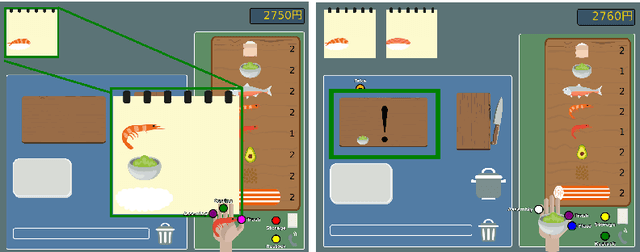
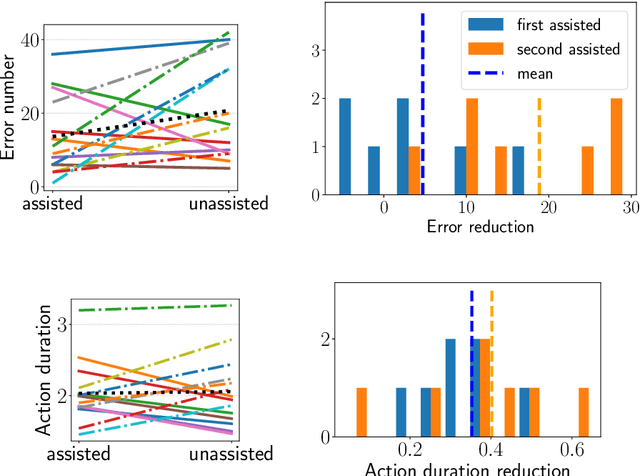
When cooperating with a human, a robot should not only care about its environment and task but also develop an understanding of the partner's reasoning. To support its human partner in complex tasks, the robot can share information that it knows. However simply communicating everything will annoy and distract humans since they might already be aware of and not all information is relevant in the current situation. The questions when and what type of information the human needs, are addressed through the concept of Theory of Mind based Communication which selects information sharing actions based on evaluation of relevance and an estimation of human beliefs. We integrate this into a communication assistant to support humans in a cooperative setting and evaluate performance benefits. We designed a human robot Sushi making task that is challenging for the human and generates different situations where humans are unaware and communication could be beneficial. We evaluate the influence of the human centric communication concept on performance with a user study. Compared to the condition without information exchange, assisted participants can recover from unawareness much earlier. The approach respects the costs of communication and balances interruptions better than other approaches. By providing information adapted to specific situations, the robot does not instruct but enable the human to make good decision.