 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Remote Driver Performance in Urban Environment Operational Design Domains
Mar 29, 2025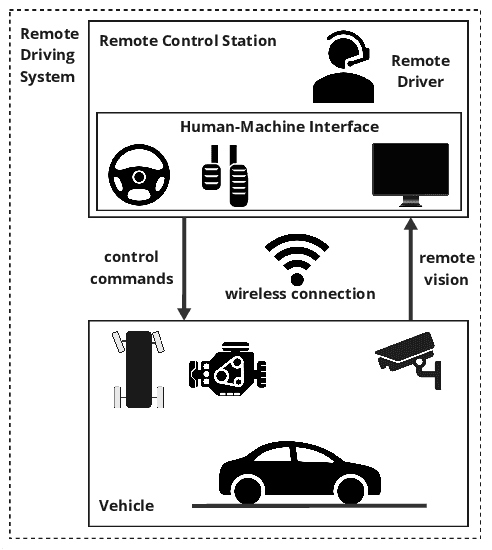
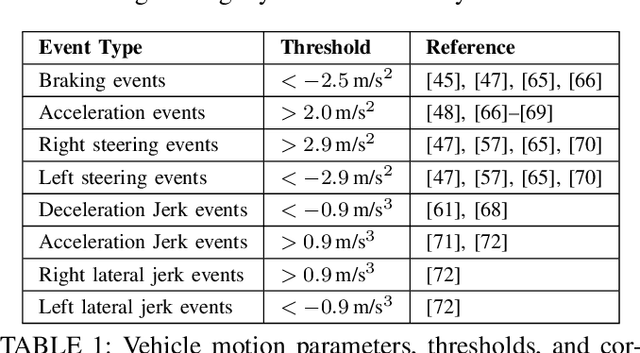
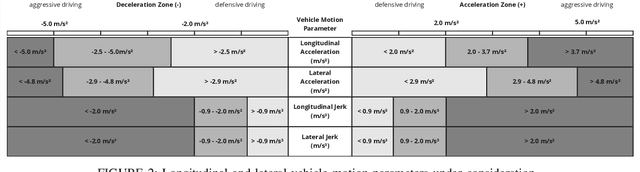
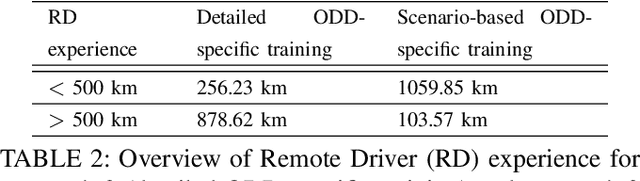
Remote driving has emerged as a solution for enabling human intervention in scenarios where Automated Driving Systems (ADS) face challenges, particularly in urban Operational Design Domains (ODDs). This study evaluates the performance of Remote Drivers (RDs) of passenger cars in a representative urban ODD in Las Vegas, focusing on the influence of cumulative driving experience and targeted training approaches. Using performance metrics such as efficiency, braking, acceleration, and steering, the study shows that driving experience can lead to noticeable improvements of RDs and demonstrates how experience up to 600 km correlates with improved vehicle control. In addition, driving efficiency exhibited a positive trend with increasing kilometers, particularly during the first 300 km of experience, which reaches a plateau from 400 km within a range of 0.35 to 0.42 km/min in the defined ODD. The research further compares ODD-specific training methods, where the detailed ODD training approaches attains notable advantages over other training approaches. The findings underscore the importance of tailored ODD training in enhancing RD performance, safety, and scalability for Remote Driving System (RDS) in real-world applications, while identifying opportunities for optimizing training protocols to address both routine and extreme scenarios. The study provides a robust foundation for advancing RDS deployment within urban environments, contributing to the development of scalable and safety-critical remote operation standards.
Hybrid Many-Objective Optimization in Probabilistic Mission Design for Compliant and Effective UAV Routing
Dec 24, 2024Advanced Aerial Mobility encompasses many outstanding applications that promise to revolutionize modern logistics and pave the way for various public services and industry uses. However, throughout its history, the development of such systems has been impeded by the complexity of legal restrictions and physical constraints. While airspaces are often tightly shaped by various legal requirements, Unmanned Aerial Vehicles (UAV) must simultaneously consider, among others, energy demands, signal quality, and noise pollution. In this work, we address this challenge by presenting a novel architecture that integrates methods of Probabilistic Mission Design (ProMis) and Many-Objective Optimization for UAV routing. Hereby, our framework is able to comply with legal requirements under uncertainty while producing effective paths that minimize various physical costs a UAV needs to consider when traversing human-inhabited spaces. To this end, we combine hybrid probabilistic first-order logic for spatial reasoning with mixed deterministic-stochastic route optimization, incorporating physical objectives such as energy consumption and radio interference with a logical, probabilistic model of legal requirements. We demonstrate the versatility and advantages of our system in a large-scale empirical evaluation over real-world, crowd-sourced data from a map extract from the city of Paris, France, showing how a network of effective and compliant paths can be formed.
Online and Predictive Warning System for Forced Lane Changes using Risk Maps
Mar 15, 2023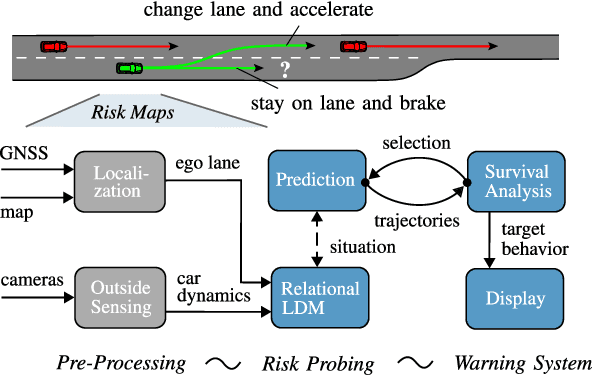
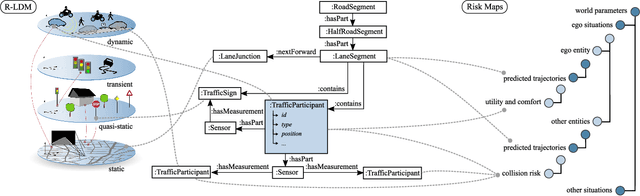
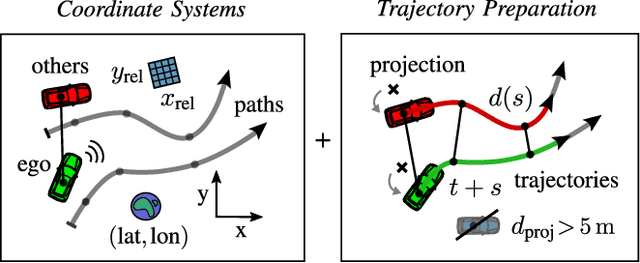
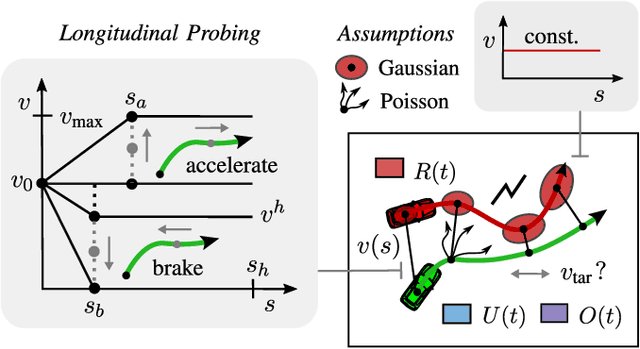
The survival analysis of driving trajectories allows for holistic evaluations of car-related risks caused by collisions or curvy roads. This analysis has advantages over common Time-To-X indicators, such as its predictive and probabilistic nature. However, so far, the theoretical risks have not been demonstrated in real-world environments. In this paper, we therefore present Risk Maps (RM) for online warning support in situations with forced lane changes, due to the end of roads. For this purpose, we first unify sensor data in a Relational Local Dynamic Map (R-LDM). RM is afterwards able to be run in real-time and efficiently probes a range of situations in order to determine risk-minimizing behaviors. Hereby, we focus on the improvement of uncertainty-awareness and transparency of the system. Risk, utility and comfort costs are included in a single formula and are intuitively visualized to the driver. In the conducted experiments, a low-cost sensor setup with a GNSS receiver for localization and multiple cameras for object detection are leveraged. The final system is successfully applied on two-lane roads and recommends lane change advices, which are separated in gap and no-gap indications. These results are promising and present an important step towards interpretable safety.
Theory of Mind Based Assistive Communication in Complex Human Robot Cooperation
Sep 03, 2021
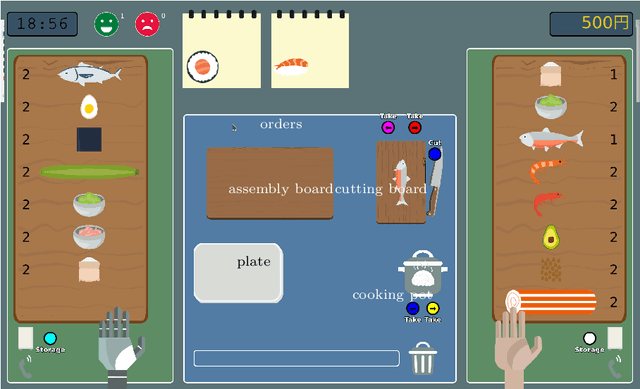
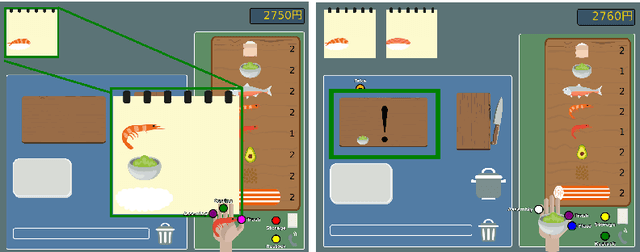
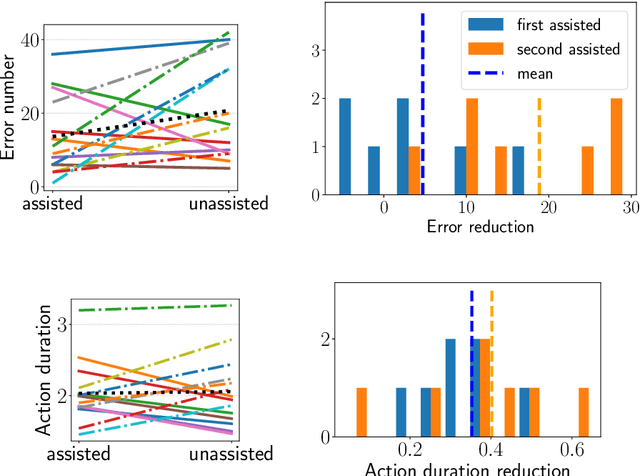
When cooperating with a human, a robot should not only care about its environment and task but also develop an understanding of the partner's reasoning. To support its human partner in complex tasks, the robot can share information that it knows. However simply communicating everything will annoy and distract humans since they might already be aware of and not all information is relevant in the current situation. The questions when and what type of information the human needs, are addressed through the concept of Theory of Mind based Communication which selects information sharing actions based on evaluation of relevance and an estimation of human beliefs. We integrate this into a communication assistant to support humans in a cooperative setting and evaluate performance benefits. We designed a human robot Sushi making task that is challenging for the human and generates different situations where humans are unaware and communication could be beneficial. We evaluate the influence of the human centric communication concept on performance with a user study. Compared to the condition without information exchange, assisted participants can recover from unawareness much earlier. The approach respects the costs of communication and balances interruptions better than other approaches. By providing information adapted to specific situations, the robot does not instruct but enable the human to make good decision.
Improved Multi-Source Domain Adaptation by Preservation of Factors
Oct 16, 2020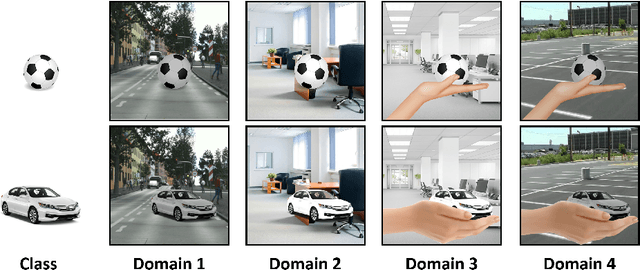
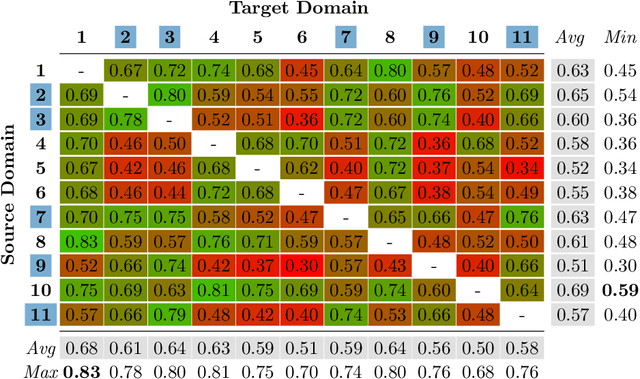
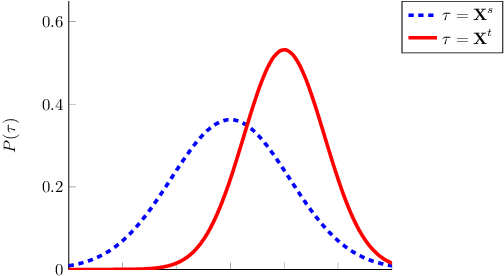
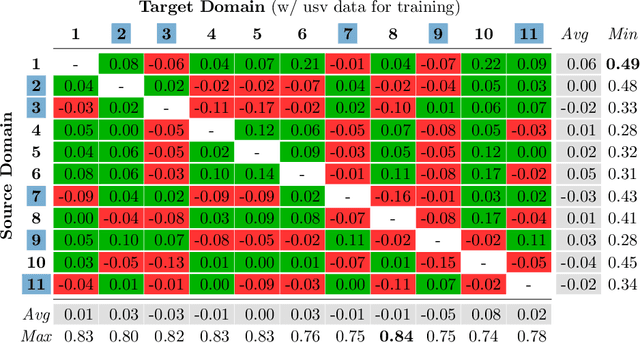
Domain Adaptation (DA) is a highly relevant research topic when it comes to image classification with deep neural networks. Combining multiple source domains in a sophisticated way to optimize a classification model can improve the generalization to a target domain. Here, the difference in data distributions of source and target image datasets plays a major role. In this paper, we describe based on a theory of visual factors how real-world scenes appear in images in general and how recent DA datasets are composed of such. We show that different domains can be described by a set of so called domain factors, whose values are consistent within a domain, but can change across domains. Many DA approaches try to remove all domain factors from the feature representation to be domain invariant. In this paper we show that this can lead to negative transfer since task-informative factors can get lost as well. To address this, we propose Factor-Preserving DA (FP-DA), a method to train a deep adversarial unsupervised DA model, which is able to preserve specific task relevant factors in a multi-domain scenario. We demonstrate on CORe50, a dataset with many domains, how such factors can be identified by standard one-to-one transfer experiments between single domains combined with PCA. By applying FP-DA, we show that the highest average and minimum performance can be achieved.
Generating Compact Geometric Track-Maps for Train Positioning Applications
Mar 12, 2019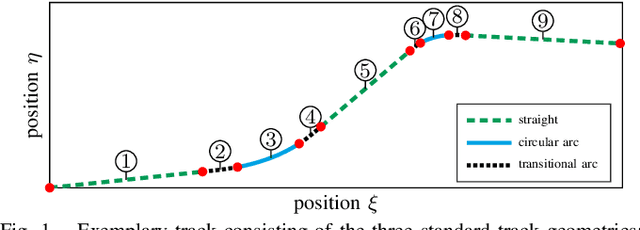
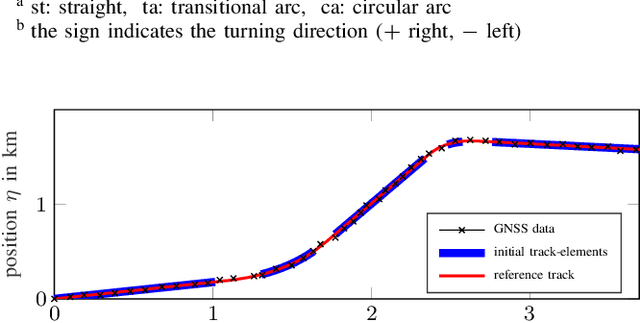
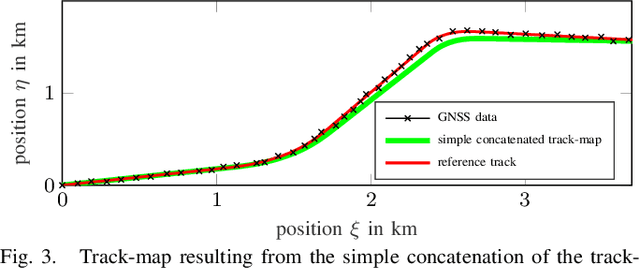
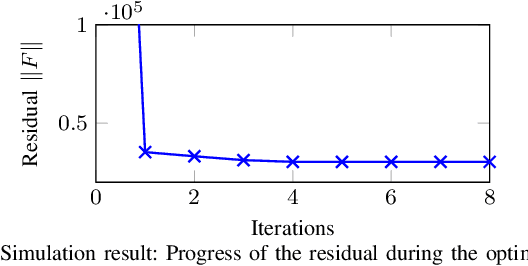
In this paper we present a method to generate compact geometric track-maps for train-borne localization applications. We first give a brief overview on the role of track maps and it becomes apparent that there are hardly any adequate methods to generate suitable geometric track-maps. Therefore, we present a novel map generation procedure that uses an optimization formulation to find the continuous sequence of track geometries that fits the available measurement data best. The optimization is initialized with the results from a localization filter developed in our previous work. The filter also provides the required information for shape identification and measurement association. The approach will be evaluated using simulated data in comparison to the typically used data-point based maps.