 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline and Predictive Warning System for Forced Lane Changes using Risk Maps
Mar 15, 2023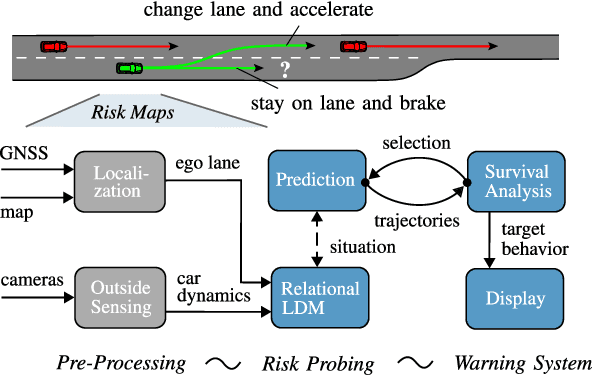
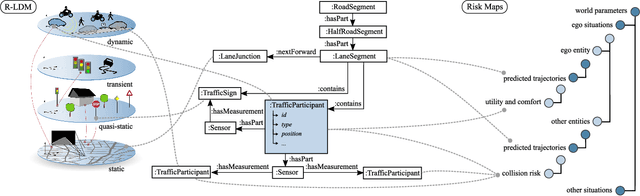
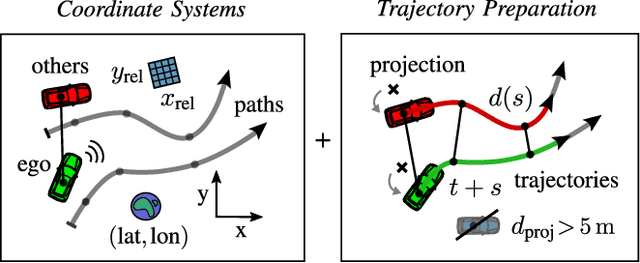
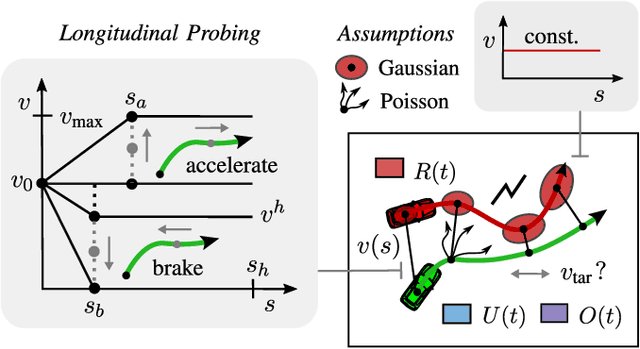
The survival analysis of driving trajectories allows for holistic evaluations of car-related risks caused by collisions or curvy roads. This analysis has advantages over common Time-To-X indicators, such as its predictive and probabilistic nature. However, so far, the theoretical risks have not been demonstrated in real-world environments. In this paper, we therefore present Risk Maps (RM) for online warning support in situations with forced lane changes, due to the end of roads. For this purpose, we first unify sensor data in a Relational Local Dynamic Map (R-LDM). RM is afterwards able to be run in real-time and efficiently probes a range of situations in order to determine risk-minimizing behaviors. Hereby, we focus on the improvement of uncertainty-awareness and transparency of the system. Risk, utility and comfort costs are included in a single formula and are intuitively visualized to the driver. In the conducted experiments, a low-cost sensor setup with a GNSS receiver for localization and multiple cameras for object detection are leveraged. The final system is successfully applied on two-lane roads and recommends lane change advices, which are separated in gap and no-gap indications. These results are promising and present an important step towards interpretable safety.
Some Aspects of Geometric Computer Vision for Analysing Dynamical Scenes focusing Automotive Applications
Aug 19, 2019
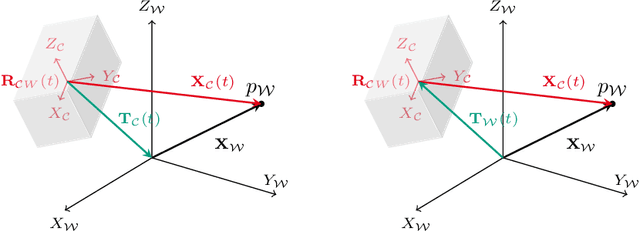
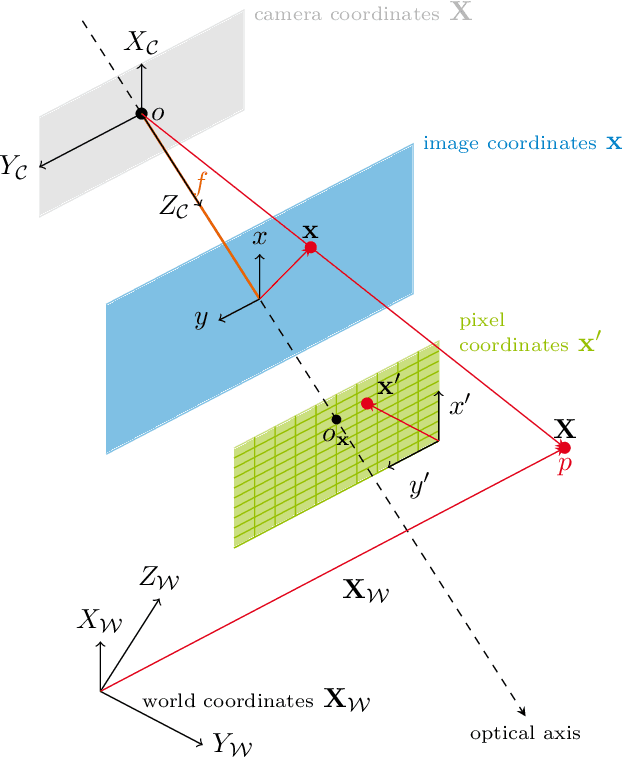
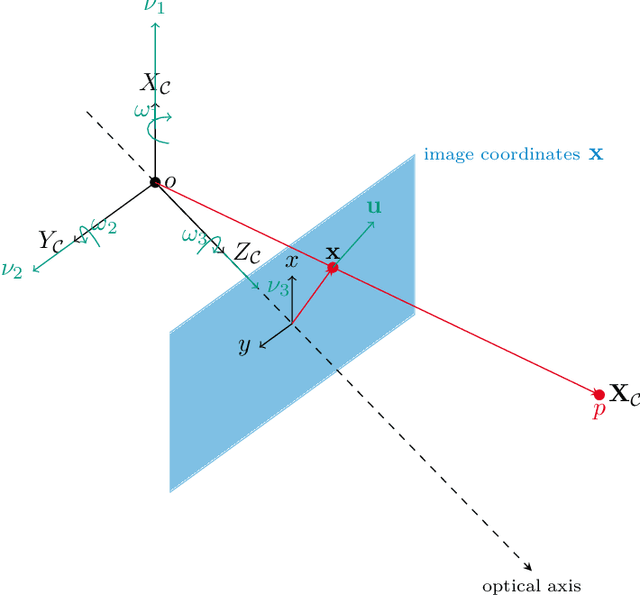
This draft summarizes some basics about geometric computer vision needed to implement efficient computer vision algorithms for applications that use measurements from at least one digital camera mounted on a moving platform with a special focus on automotive applications processing image streams taken from cameras mounted on a car. Our intention is twofold: On the one hand, we would like to introduce well-known basic geometric relations in a compact way that can also be found in lecture books about geometric computer vision like [1, 2]. On the other hand, we would like to share some experience about subtleties that should be taken into account in order to set up quite simple but robust and fast vision algorithms that are able to run in real time. We added a conglomeration of literature, we found to be relevant when implementing basic algorithms like optical flow, visual odometry and structure from motion. The reader should get some feeling about how the estimates of these algorithms are interrelated, which parts of the algorithms are critical in terms of robustness and what kind of additional assumptions can be useful to constrain the solution space of the underlying usually non-convex optimization problems.
Generating Compact Geometric Track-Maps for Train Positioning Applications
Mar 12, 2019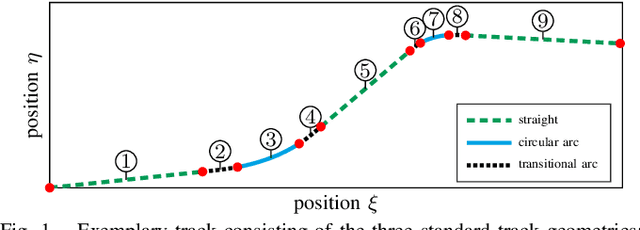
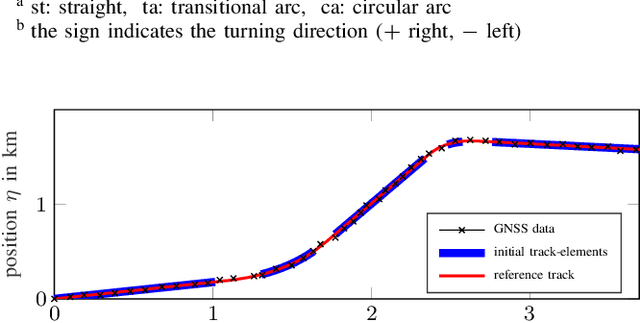
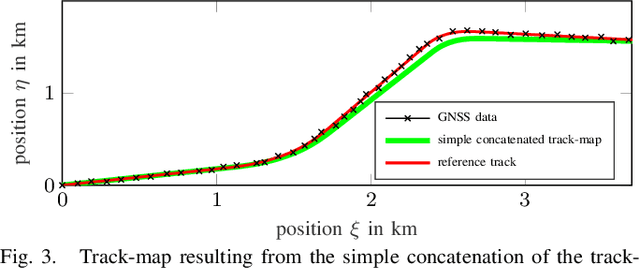
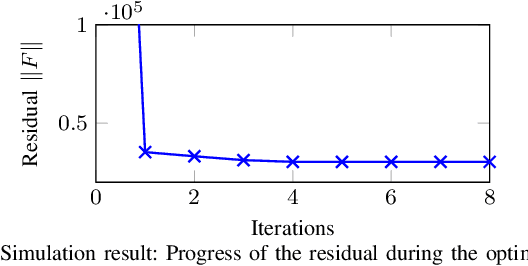
In this paper we present a method to generate compact geometric track-maps for train-borne localization applications. We first give a brief overview on the role of track maps and it becomes apparent that there are hardly any adequate methods to generate suitable geometric track-maps. Therefore, we present a novel map generation procedure that uses an optimization formulation to find the continuous sequence of track geometries that fits the available measurement data best. The optimization is initialized with the results from a localization filter developed in our previous work. The filter also provides the required information for shape identification and measurement association. The approach will be evaluated using simulated data in comparison to the typically used data-point based maps.
Dynamic Markers: UAV landing proof of concept
Jan 09, 2019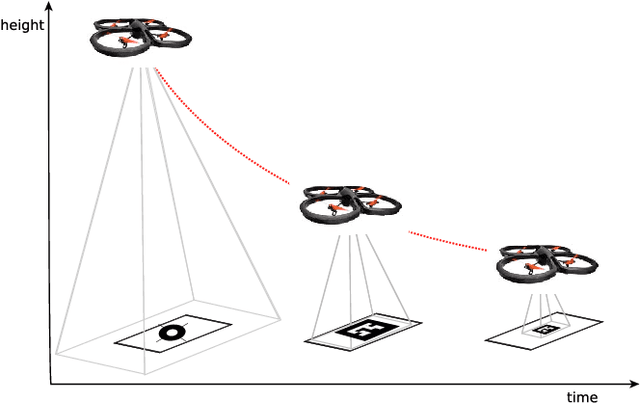
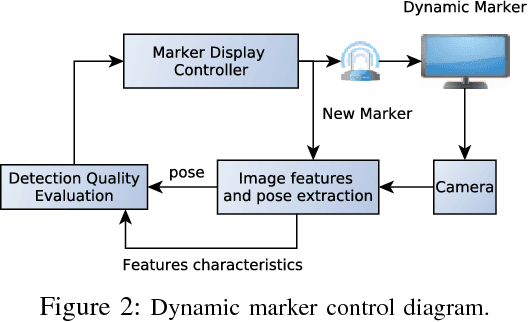

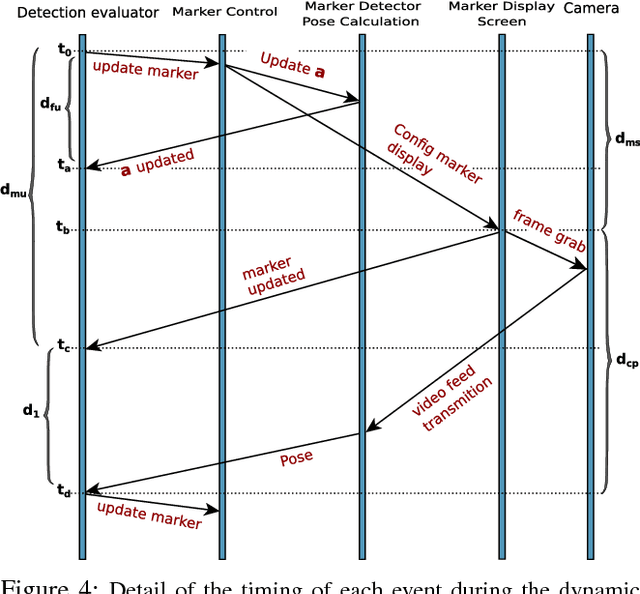
In this paper, we introduce a dynamic fiducial marker which can change its appearance according to the spatiotemporal requirements of the visual perception task of a mobile robot using a camera as the sensor. We present a control scheme to dynamically change the appearance of the marker in order to increase the range of detection and to assure a better accuracy on the close range. The marker control takes into account the camera to marker distance (which influences the scale of the marker in image coordinates) to select which fiducial markers to display. Hence, we realize a tight coupling between the visual pose control of the mobile robot and the appearance of the dynamic fiducial marker. Additionally, we discuss the practical implications of time delays due to processing time and communication delays between the robot and the marker. Finally, we propose a real-time dynamic marker visual servoing control scheme for quadcopter landing and evaluate the performance on a real-world example.
Robustness of control point configurations for homography and planar pose estimation
Mar 08, 2018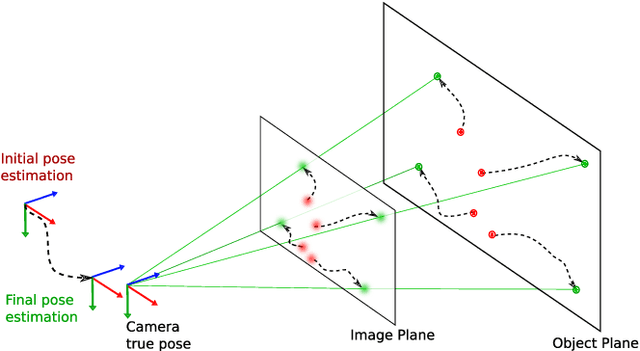
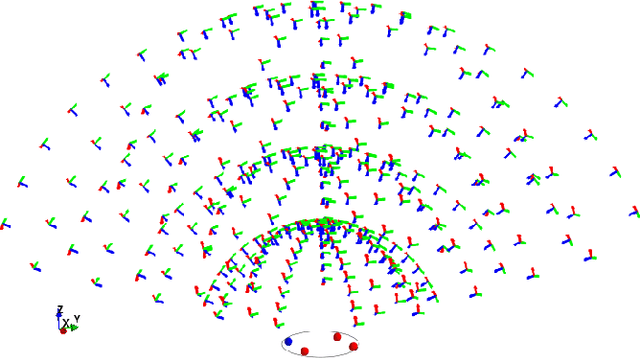
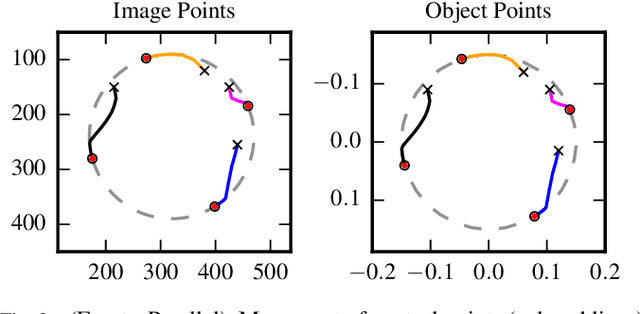
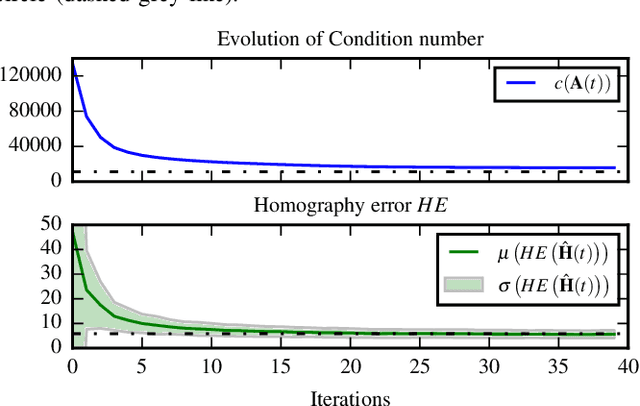
In this paper, we investigate the influence of the spatial configuration of a number of $n \geq 4$ control points on the accuracy and robustness of space resection methods, e.g. used by a fiducial marker for pose estimation. We find robust configurations of control points by minimizing the first order perturbed solution of the DLT algorithm which is equivalent to minimizing the condition number of the data matrix. An empirical statistical evaluation is presented verifying that these optimized control point configurations not only increase the performance of the DLT homography estimation but also improve the performance of planar pose estimation methods like IPPE and EPnP, including the iterative minimization of the reprojection error which is the most accurate algorithm. We provide the characteristics of stable control point configurations for real-world noisy camera data that are practically independent on the camera pose and form certain symmetric patterns dependent on the number of points. Finally, we present a comparison of optimized configuration versus the number of control points.
MOMA: Visual Mobile Marker Odometry
Apr 18, 2017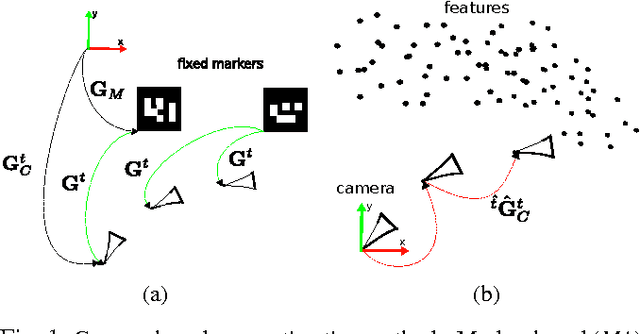
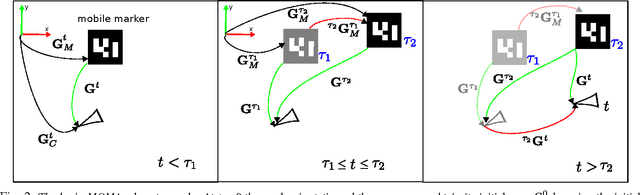
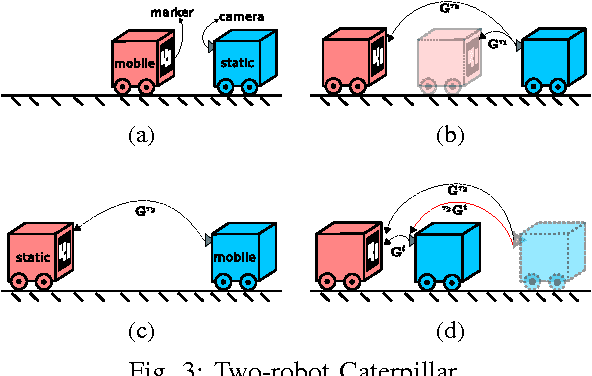
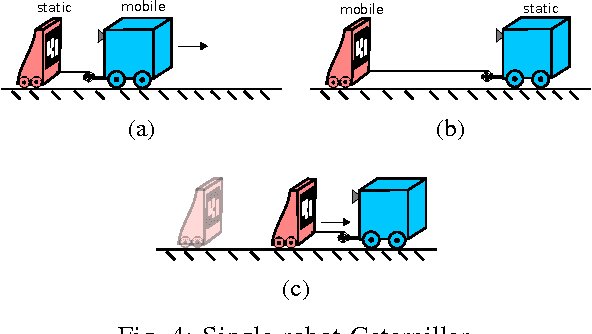
In this paper, we present a cooperative odometry scheme based on the detection of mobile markers in line with the idea of cooperative positioning for multiple robots [1]. To this end, we introduce a simple optimization scheme that realizes visual mobile marker odometry via accurate fixed marker-based camera positioning and analyse the characteristics of errors inherent to the method compared to classical fixed marker-based navigation and visual odometry. In addition, we provide a specific UAV-UGV configuration that allows for continuous movements of the UAV without doing stops and a minimal caterpillar-like configuration that works with one UGV alone. Finally, we present a real-world implementation and evaluation for the proposed UAV-UGV configuration.