 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustness of control point configurations for homography and planar pose estimation
Paper and Code
Mar 08, 2018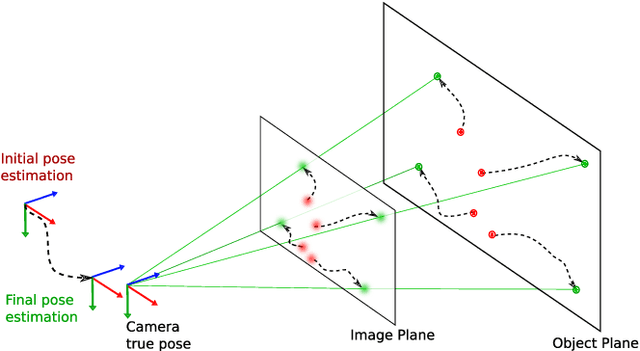
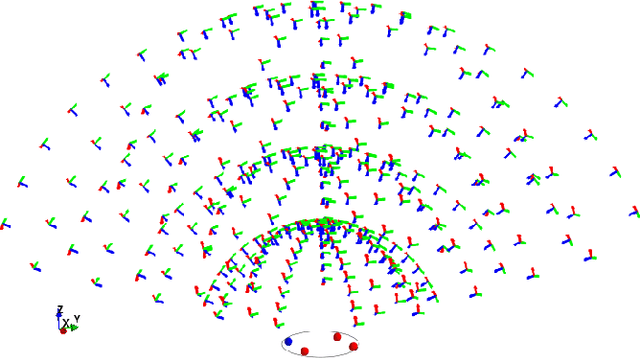
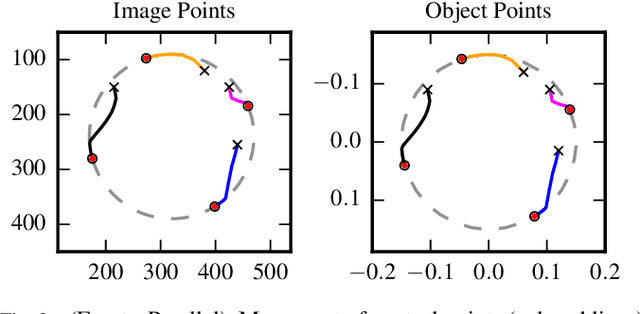
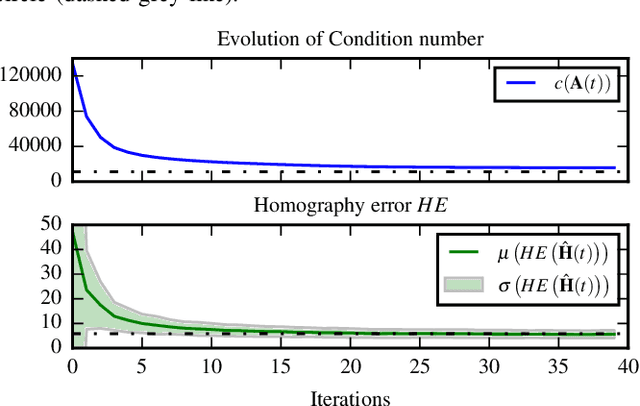
In this paper, we investigate the influence of the spatial configuration of a number of $n \geq 4$ control points on the accuracy and robustness of space resection methods, e.g. used by a fiducial marker for pose estimation. We find robust configurations of control points by minimizing the first order perturbed solution of the DLT algorithm which is equivalent to minimizing the condition number of the data matrix. An empirical statistical evaluation is presented verifying that these optimized control point configurations not only increase the performance of the DLT homography estimation but also improve the performance of planar pose estimation methods like IPPE and EPnP, including the iterative minimization of the reprojection error which is the most accurate algorithm. We provide the characteristics of stable control point configurations for real-world noisy camera data that are practically independent on the camera pose and form certain symmetric patterns dependent on the number of points. Finally, we present a comparison of optimized configuration versus the number of control points.