 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Markers: UAV landing proof of concept
Paper and Code
Jan 09, 2019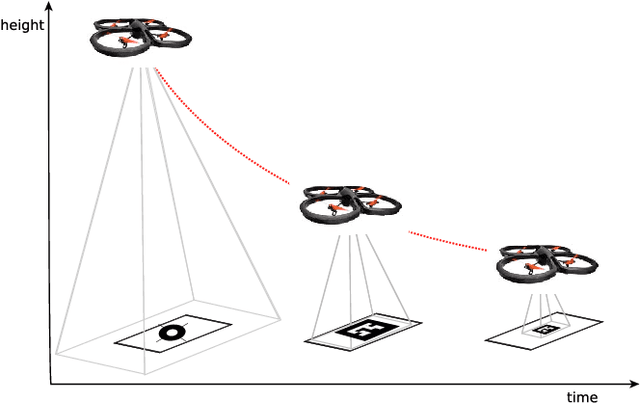
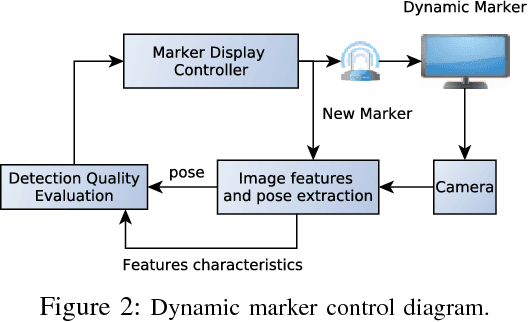

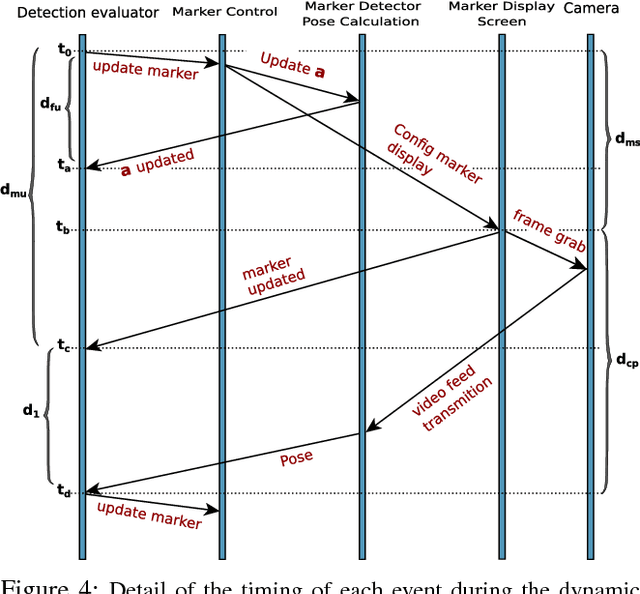
In this paper, we introduce a dynamic fiducial marker which can change its appearance according to the spatiotemporal requirements of the visual perception task of a mobile robot using a camera as the sensor. We present a control scheme to dynamically change the appearance of the marker in order to increase the range of detection and to assure a better accuracy on the close range. The marker control takes into account the camera to marker distance (which influences the scale of the marker in image coordinates) to select which fiducial markers to display. Hence, we realize a tight coupling between the visual pose control of the mobile robot and the appearance of the dynamic fiducial marker. Additionally, we discuss the practical implications of time delays due to processing time and communication delays between the robot and the marker. Finally, we propose a real-time dynamic marker visual servoing control scheme for quadcopter landing and evaluate the performance on a real-world example.