 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOMA: Visual Mobile Marker Odometry
Apr 18, 2017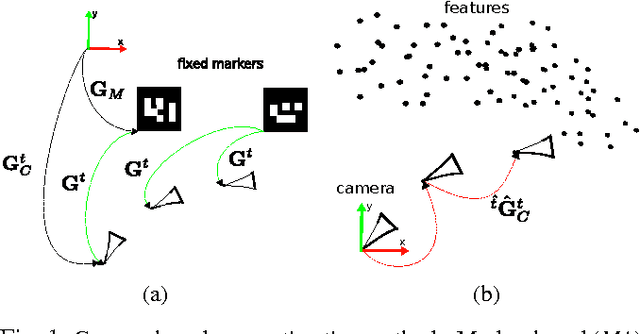
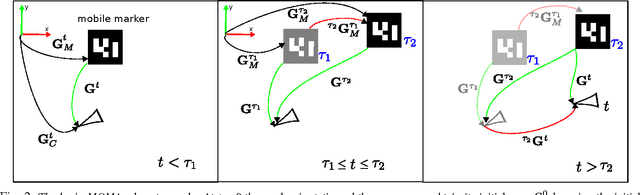
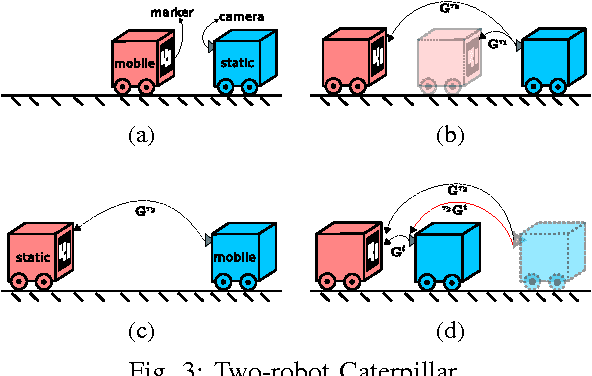
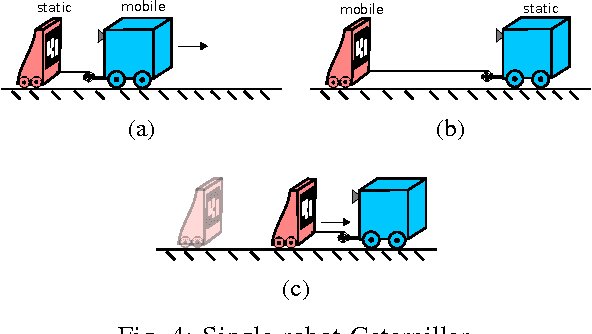
In this paper, we present a cooperative odometry scheme based on the detection of mobile markers in line with the idea of cooperative positioning for multiple robots [1]. To this end, we introduce a simple optimization scheme that realizes visual mobile marker odometry via accurate fixed marker-based camera positioning and analyse the characteristics of errors inherent to the method compared to classical fixed marker-based navigation and visual odometry. In addition, we provide a specific UAV-UGV configuration that allows for continuous movements of the UAV without doing stops and a minimal caterpillar-like configuration that works with one UGV alone. Finally, we present a real-world implementation and evaluation for the proposed UAV-UGV configuration.