 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRight in Time: Reactive Reasoning in Regulated Traffic Spaces
Mar 04, 2026Exact inference in probabilistic First-Order Logic offers a promising yet computationally costly approach for regulating the behavior of autonomous agents in shared traffic spaces. While prior methods have combined logical and probabilistic data into decision-making frameworks, their application is often limited to pre-flight checks due to the complexity of reasoning across vast numbers of possible universes. In this work, we propose a reactive mission design framework that jointly considers uncertain environmental data and declarative, logical traffic regulations. By synthesizing Probabilistic Mission Design (ProMis) with reactive reasoning facilitated by Reactive Circuits (RC), we enable online, exact probabilistic inference over hybrid domains. Our approach leverages the Frequency of Change inherent in heterogeneous data streams to subdivide inference formulas into memoized, isolated tasks, ensuring that only the specific components affected by new sensor data are re-evaluated. In experiments involving both real-world vessel data and simulated drone traffic in dense urban scenarios, we demonstrate that our approach provides orders of magnitude in speedup over ProMis without reactive paradigms. This allows intelligent transportation systems, such as Unmanned Aircraft Systems (UAS), to actively assert safety and legal compliance during operations rather than relying solely on preparation procedures.
Reactive Knowledge Representation and Asynchronous Reasoning
Feb 05, 2026Exact inference in complex probabilistic models often incurs prohibitive computational costs. This challenge is particularly acute for autonomous agents in dynamic environments that require frequent, real-time belief updates. Existing methods are often inefficient for ongoing reasoning, as they re-evaluate the entire model upon any change, failing to exploit that real-world information streams have heterogeneous update rates. To address this, we approach the problem from a reactive, asynchronous, probabilistic reasoning perspective. We first introduce Resin (Reactive Signal Inference), a probabilistic programming language that merges probabilistic logic with reactive programming. Furthermore, to provide efficient and exact semantics for Resin, we propose Reactive Circuits (RCs). Formulated as a meta-structure over Algebraic Circuits and asynchronous data streams, RCs are time-dynamic Directed Acyclic Graphs that autonomously adapt themselves based on the volatility of input signals. In high-fidelity drone swarm simulations, our approach achieves several orders of magnitude of speedup over frequency-agnostic inference. We demonstrate that RCs' structural adaptations successfully capture environmental dynamics, significantly reducing latency and facilitating reactive real-time reasoning. By partitioning computations based on the estimated Frequency of Change in the asynchronous inputs, large inference tasks can be decomposed into individually memoized sub-problems. This ensures that only the specific components of a model affected by new information are re-evaluated, drastically reducing redundant computation in streaming contexts.
Probabilistic Mission Design in Neuro-Symbolic Systems
Dec 25, 2024



Advanced Air Mobility (AAM) is a growing field that demands accurate modeling of legal concepts and restrictions in navigating intelligent vehicles. In addition, any implementation of AAM needs to face the challenges posed by inherently dynamic and uncertain human-inhabited spaces robustly. Nevertheless, the employment of Unmanned Aircraft Systems (UAS) beyond visual line of sight (BVLOS) is an endearing task that promises to enhance significantly today's logistics and emergency response capabilities. To tackle these challenges, we present a probabilistic and neuro-symbolic architecture to encode legal frameworks and expert knowledge over uncertain spatial relations and noisy perception in an interpretable and adaptable fashion. More specifically, we demonstrate Probabilistic Mission Design (ProMis), a system architecture that links geospatial and sensory data with declarative, Hybrid Probabilistic Logic Programs (HPLP) to reason over the agent's state space and its legality. As a result, ProMis generates Probabilistic Mission Landscapes (PML), which quantify the agent's belief that a set of mission conditions is satisfied across its navigation space. Extending prior work on ProMis' reasoning capabilities and computational characteristics, we show its integration with potent machine learning models such as Large Language Models (LLM) and Transformer-based vision models. Hence, our experiments underpin the application of ProMis with multi-modal input data and how our method applies to many important AAM scenarios.
The Constitutional Filter
Dec 24, 2024



Predictions in environments where a mix of legal policies, physical limitations, and operational preferences impacts an agent's motion are inherently difficult. Since Neuro-Symbolic systems allow for differentiable information flow between deep learning and symbolic building blocks, they present a promising avenue for expressing such high-level constraints. While prior work has demonstrated how to establish novel planning setups, e.g., in advanced aerial mobility tasks, their application in prediction tasks has been underdeveloped. We present the Constitutional Filter (CoFi), a novel filter architecture leveraging a Neuro-Symbolic representation of an agent's rules, i.e., its constitution, to (i) improve filter accuracy, (ii) leverage expert knowledge, (iii) incorporate deep learning architectures, and (iv) account for uncertainties in the environments through probabilistic spatial relations. CoFi follows a general, recursive Bayesian estimation setting, making it compatible with a vast landscape of estimation techniques such as Particle Filters. To underpin the advantages of CoFi, we validate its performance on real-world marine data from the Automatic Identification System and official Electronic Navigational Charts.
Hybrid Many-Objective Optimization in Probabilistic Mission Design for Compliant and Effective UAV Routing
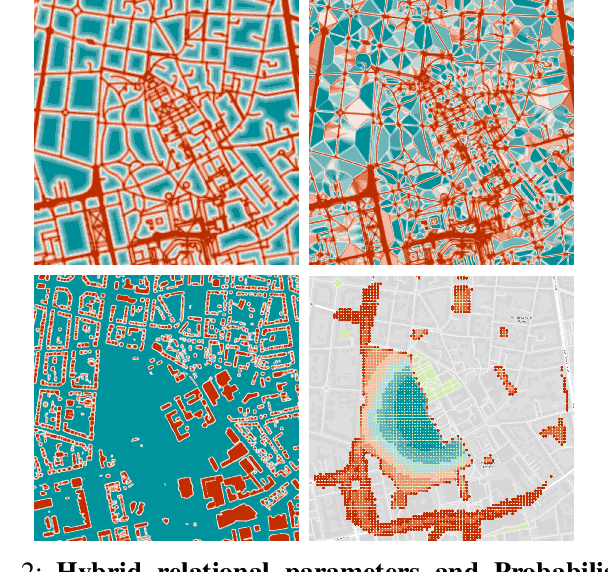
Dec 24, 2024Advanced Aerial Mobility encompasses many outstanding applications that promise to revolutionize modern logistics and pave the way for various public services and industry uses. However, throughout its history, the development of such systems has been impeded by the complexity of legal restrictions and physical constraints. While airspaces are often tightly shaped by various legal requirements, Unmanned Aerial Vehicles (UAV) must simultaneously consider, among others, energy demands, signal quality, and noise pollution. In this work, we address this challenge by presenting a novel architecture that integrates methods of Probabilistic Mission Design (ProMis) and Many-Objective Optimization for UAV routing. Hereby, our framework is able to comply with legal requirements under uncertainty while producing effective paths that minimize various physical costs a UAV needs to consider when traversing human-inhabited spaces. To this end, we combine hybrid probabilistic first-order logic for spatial reasoning with mixed deterministic-stochastic route optimization, incorporating physical objectives such as energy consumption and radio interference with a logical, probabilistic model of legal requirements. We demonstrate the versatility and advantages of our system in a large-scale empirical evaluation over real-world, crowd-sourced data from a map extract from the city of Paris, France, showing how a network of effective and compliant paths can be formed.
StaR Maps: Unveiling Uncertainty in Geospatial Relations
Dec 24, 2024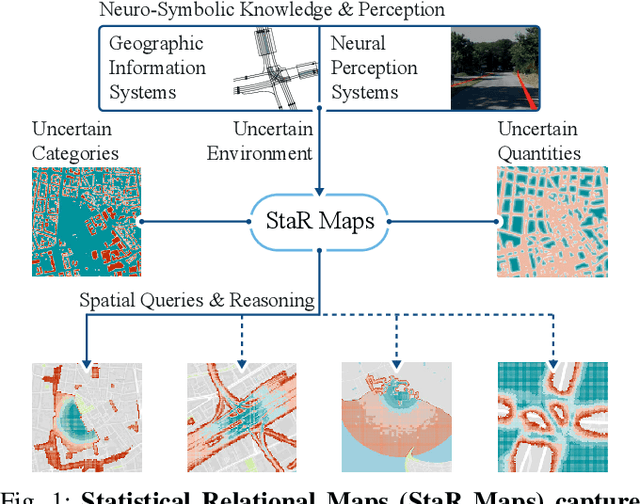

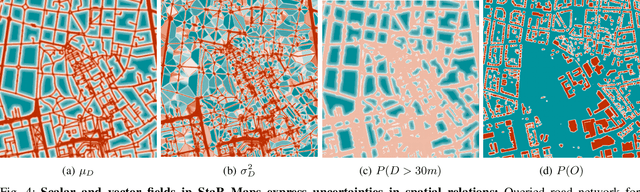
The growing complexity of intelligent transportation systems and their applications in public spaces has increased the demand for expressive and versatile knowledge representation. While various mapping efforts have achieved widespread coverage, including detailed annotation of features with semantic labels, it is essential to understand their inherent uncertainties, which are commonly underrepresented by the respective geographic information systems. Hence, it is critical to develop a representation that combines a statistical, probabilistic perspective with the relational nature of geospatial data. Further, such a representation should facilitate an honest view of the data's accuracy and provide an environment for high-level reasoning to obtain novel insights from task-dependent queries. Our work addresses this gap in two ways. First, we present Statistical Relational Maps (StaR Maps) as a representation of uncertain, semantic map data. Second, we demonstrate efficient computation of StaR Maps to scale the approach to wide urban spaces. Through experiments on real-world, crowd-sourced data, we underpin the application and utility of StaR Maps in terms of representing uncertain knowledge and reasoning for complex geospatial information.
Error Decomposition for Hybrid Localization Systems
Oct 18, 2024


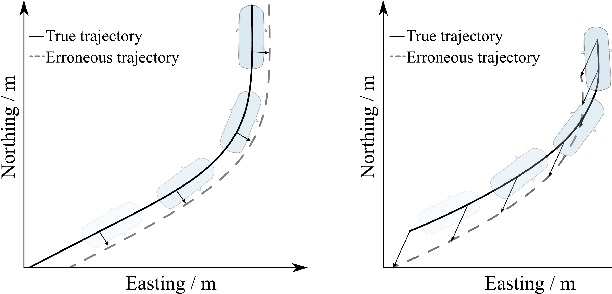
Future advanced driver assistance systems and autonomous vehicles rely on accurate localization, which can be divided into three classes: a) viewpoint localization about local references (e.g., via vision-based localization), b) absolute localization about a global reference system (e.g., via satellite navigation), and c) hybrid localization, which presents a combination of the former two. Hybrid localization shares characteristics and strengths of both absolute and viewpoint localization. However, new sources of error, such as inaccurate sensor-setup calibration, complement the potential errors of the respective sub-systems. Therefore, this paper introduces a general approach to analyzing error sources in hybrid localization systems. More specifically, we propose the Kappa-Phi method, which allows for the decomposition of localization errors into individual components, i.e., into a sum of parameterized functions of the measured state (e.g., agent kinematics). The error components can then be leveraged to, e.g., improve localization predictions, correct map data, or calibrate sensor setups. Theoretical derivations and evaluations show that the algorithm presents a promising approach to improve hybrid localization and counter the weaknesses of the system's individual components.
Human-Based Risk Model for Improved Driver Support in Interactive Driving Scenarios
Oct 03, 2024



This paper addresses the problem of human-based driver support. Nowadays, driver support systems help users to operate safely in many driving situations. Nevertheless, these systems do not fully use the rich information that is available from sensing the human driver. In this paper, we therefore present a human-based risk model that uses driver information for improved driver support. In contrast to state of the art, our proposed risk model combines a) the current driver perception based on driver errors, such as the driver overlooking another vehicle (i.e., notice error), and b) driver personalization, such as the driver being defensive or confident. In extensive simulations of multiple interactive driving scenarios, we show that our novel human-based risk model achieves earlier warning times and reduced warning errors compared to a baseline risk model not using human driver information.
Towards Probabilistic Clearance, Explanation and Optimization
Jun 21, 2024
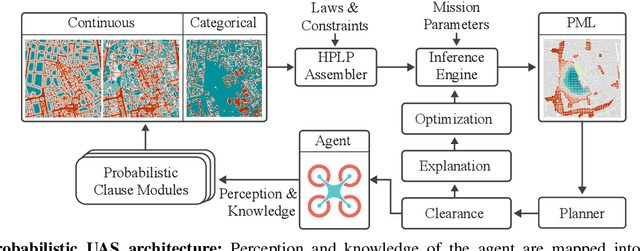
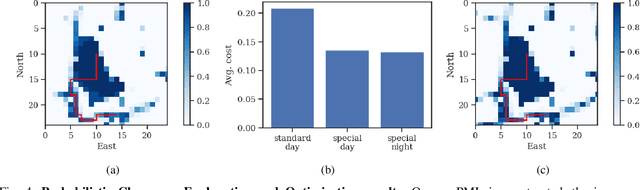
Employing Unmanned Aircraft Systems (UAS) beyond visual line of sight (BVLOS) is an endearing and challenging task. While UAS have the potential to significantly enhance today's logistics and emergency response capabilities, unmanned flying objects above the heads of unprotected pedestrians induce similarly significant safety risks. In this work, we make strides towards improved safety and legal compliance in applying UAS in two ways. First, we demonstrate navigation within the Probabilistic Mission Design (ProMis) framework. To this end, our approach translates Probabilistic Mission Landscapes (PML) into a navigation graph and derives a cost from the probability of complying with all underlying constraints. Second, we introduce the clearance, explanation, and optimization (CEO) cycle on top of ProMis by leveraging the declaratively encoded domain knowledge, legal requirements, and safety assertions to guide the mission design process. Based on inaccurate, crowd-sourced map data and a synthetic scenario, we illustrate the application and utility of our methods in UAS navigation.
Mission Design for Unmanned Aerial Vehicles using Hybrid Probabilistic Logic Program
Jun 05, 2024



Advanced Air Mobility (AAM) is a growing field that demands a deep understanding of legal, spatial and temporal concepts in navigation. Hence, any implementation of AAM is forced to deal with the inherent uncertainties of human-inhabited spaces. Enabling growth and innovation requires the creation of a system for safe and robust mission design, i.e., the way we formalize intentions and decide their execution as trajectories for the Unmanned Aerial Vehicle (UAV). Although legal frameworks have emerged to govern urban air spaces, their full integration into the decision process of autonomous agents and operators remains an open task. In this work we present ProMis, a system architecture for probabilistic mission design. It links the data available from various static and dynamic data sources with legal text and operator requirements by following principles of formal verification and probabilistic modeling. Hereby, ProMis enables the combination of low-level perception and high-level rules in AAM to infer validity over the UAV's state-space. To this end, we employ Hybrid Probabilistic Logic Programs (HPLP) as a unifying, intermediate representation between perception and action-taking. Furthermore, we present methods to connect ProMis with crowd-sourced map data by generating HPLP atoms that represent spatial relations in a probabilistic fashion. Our claims of the utility and generality of ProMis are supported by experiments on a diverse set of scenarios and a discussion of the computational demands associated with probabilistic missions.