 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReducing Warning Errors in Driver Support with Personalized Risk Maps
Oct 03, 2024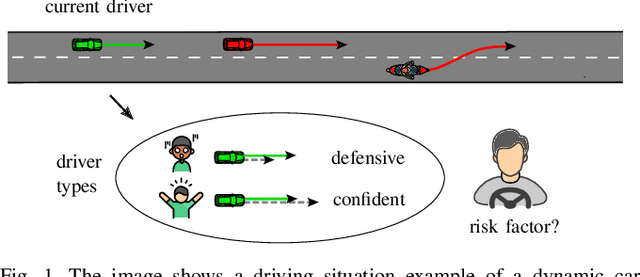
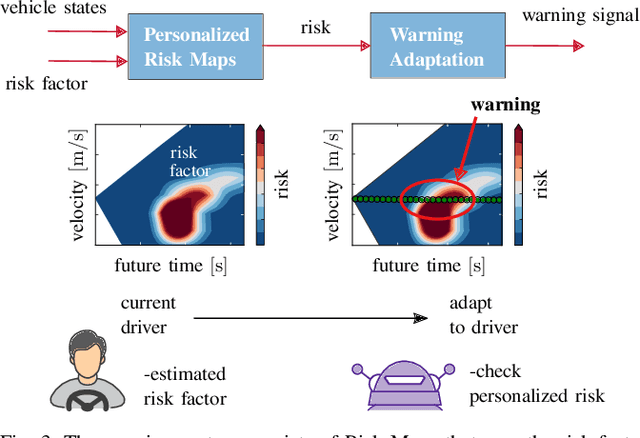
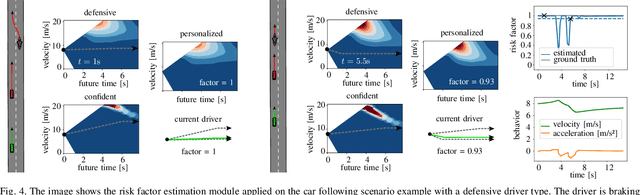
We consider the problem of human-focused driver support. State-of-the-art personalization concepts allow to estimate parameters for vehicle control systems or driver models. However, there are currently few approaches proposed that use personalized models and evaluate the effectiveness in the form of general risk warning. In this paper, we therefore propose a warning system that estimates a personalized risk factor for the given driver based on the driver's behavior. The system afterwards is able to adapt the warning signal with personalized Risk Maps. In experiments, we show examples for longitudinal following and intersection scenarios in which the novel warning system can effectively reduce false negative errors and false positive errors compared to a baseline approach which does not use personalized driver considerations. This underlines the potential of personalization for reducing warning errors in risk warning and driver support.
Human-Based Risk Model for Improved Driver Support in Interactive Driving Scenarios
Oct 03, 2024



This paper addresses the problem of human-based driver support. Nowadays, driver support systems help users to operate safely in many driving situations. Nevertheless, these systems do not fully use the rich information that is available from sensing the human driver. In this paper, we therefore present a human-based risk model that uses driver information for improved driver support. In contrast to state of the art, our proposed risk model combines a) the current driver perception based on driver errors, such as the driver overlooking another vehicle (i.e., notice error), and b) driver personalization, such as the driver being defensive or confident. In extensive simulations of multiple interactive driving scenarios, we show that our novel human-based risk model achieves earlier warning times and reduced warning errors compared to a baseline risk model not using human driver information.
Introducing Risk Shadowing For Decisive and Comfortable Behavior Planning
Jul 20, 2023We consider the problem of group interactions in urban driving. State-of-the-art behavior planners for self-driving cars mostly consider each single agent-to-agent interaction separately in a cost function in order to find an optimal behavior for the ego agent, such as not colliding with any of the other agents. In this paper, we develop risk shadowing, a situation understanding method that allows us to go beyond single interactions by analyzing group interactions between three agents. Concretely, the presented method can find out which first other agent does not need to be considered in the behavior planner of an ego agent, because this first other agent cannot reach the ego agent due to a second other agent obstructing its way. In experiments, we show that using risk shadowing as an upstream filter module for a behavior planner allows to plan more decisive and comfortable driving strategies than state of the art, given that safety is ensured in these cases. The usability of the approach is demonstrated for different intersection scenarios and longitudinal driving.
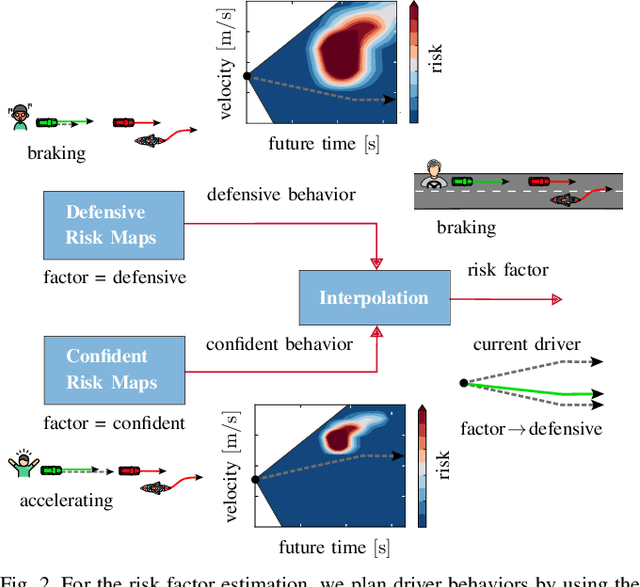
Considering Human Factors in Risk Maps for Robust and Foresighted Driver Warning
Jun 06, 2023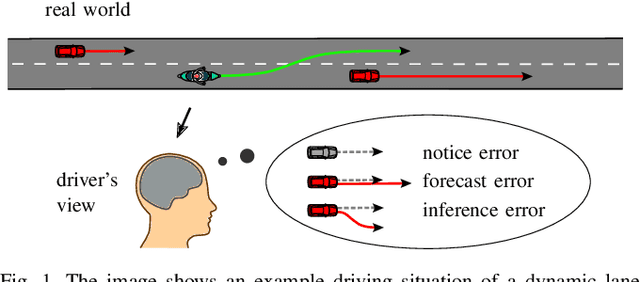

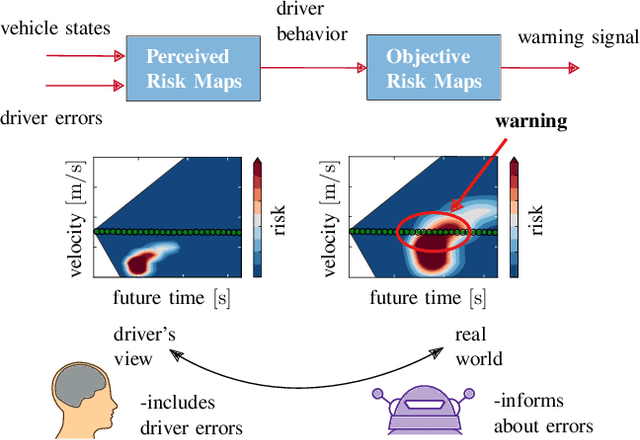
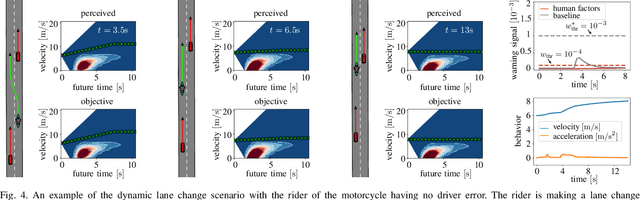
Driver support systems that include human states in the support process is an active research field. Many recent approaches allow, for example, to sense the driver's drowsiness or awareness of the driving situation. However, so far, this rich information has not been utilized much for improving the effectiveness of support systems. In this paper, we therefore propose a warning system that uses human states in the form of driver errors and can warn users in some cases of upcoming risks several seconds earlier than the state of the art systems not considering human factors. The system consists of a behavior planner Risk Maps which directly changes its prediction of the surrounding driving situation based on the sensed driver errors. By checking if this driver's behavior plan is objectively safe, a more robust and foresighted driver warning is achieved. In different simulations of a dynamic lane change and intersection scenarios, we show how the driver's behavior plan can become unsafe, given the estimate of driver errors, and experimentally validate the advantages of considering human factors.
Online and Predictive Warning System for Forced Lane Changes using Risk Maps
Mar 15, 2023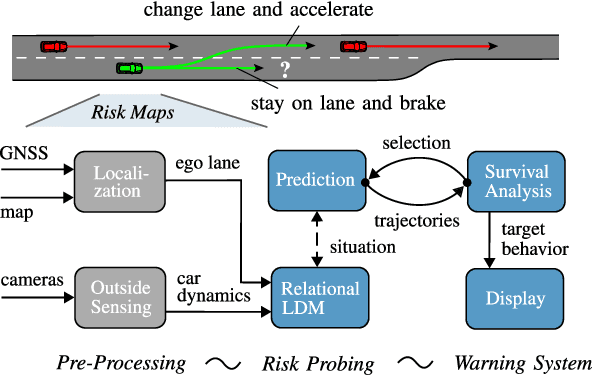
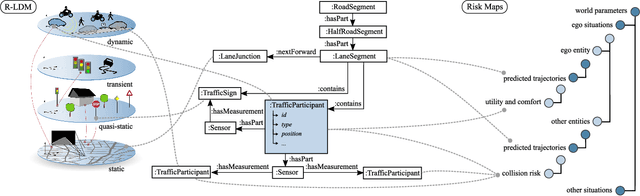
The survival analysis of driving trajectories allows for holistic evaluations of car-related risks caused by collisions or curvy roads. This analysis has advantages over common Time-To-X indicators, such as its predictive and probabilistic nature. However, so far, the theoretical risks have not been demonstrated in real-world environments. In this paper, we therefore present Risk Maps (RM) for online warning support in situations with forced lane changes, due to the end of roads. For this purpose, we first unify sensor data in a Relational Local Dynamic Map (R-LDM). RM is afterwards able to be run in real-time and efficiently probes a range of situations in order to determine risk-minimizing behaviors. Hereby, we focus on the improvement of uncertainty-awareness and transparency of the system. Risk, utility and comfort costs are included in a single formula and are intuitively visualized to the driver. In the conducted experiments, a low-cost sensor setup with a GNSS receiver for localization and multiple cameras for object detection are leveraged. The final system is successfully applied on two-lane roads and recommends lane change advices, which are separated in gap and no-gap indications. These results are promising and present an important step towards interpretable safety.
Continuous Risk Measures for Driving Support
Mar 14, 2023In this paper, we compare three different model-based risk measures by evaluating their stengths and weaknesses qualitatively and testing them quantitatively on a set of real longitudinal and intersection scenarios. We start with the traditional heuristic Time-To-Collision (TTC), which we extend towards 2D operation and non-crash cases to retrieve the Time-To-Closest-Encounter (TTCE). The second risk measure models position uncertainty with a Gaussian distribution and uses spatial occupancy probabilities for collision risks. We then derive a novel risk measure based on the statistics of sparse critical events and so-called survival conditions. The resulting survival analysis shows to have an earlier detection time of crashes and less false positive detections in near-crash and non-crash cases supported by its solid theoretical grounding. It can be seen as a generalization of TTCE and the Gaussian method which is suitable for the validation of ADAS and AD.
Comfortable Priority Handling with Predictive Velocity Optimization for Intersection Crossings
Mar 14, 2023We address the problem of motion planning for four-way intersection crossings with right-of-ways. Road safety typically assigns liability to the follower in rear-end collisions and to the approaching vehicle required to yield in side crashes. As an alternative to previous models based on heuristic state machines, we propose a planning framework which changes the prediction model of other cars (e.g. their prototypical accelerations and decelerations) depending on the given longitudinal or lateral priority rules. Combined with a state-of-the-art trajectory optimization approach ROPT (Risk Optimization Method) this allows to find ego velocity profiles minimizing risks from curves and all involved vehicles while maximizing utility (needed time to arrive at a goal) and comfort (change and duration of acceleration) under the presence of regulatory conditions. Analytical and statistical evaluations show that our method is able to follow right-of-ways for a wide range of other vehicle behaviors and path geometries. Even when the other cars drive in a non-priority-compliant way, ROPT achieves good risk-comfort tradeoffs.
Proactive Risk Navigation System for Real-World Urban Intersections
Mar 14, 2023
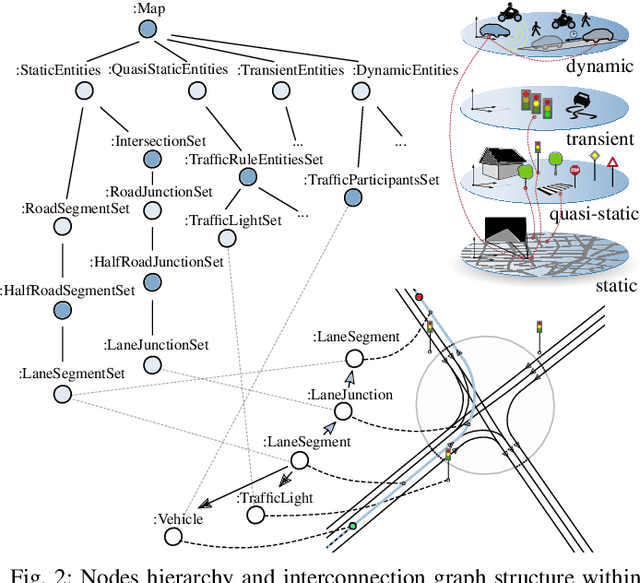


We consider the problem of intelligently navigating through complex traffic. Urban situations are defined by the underlying map structure and special regulatory objects of e.g. a stop line or crosswalk. Thereon dynamic vehicles (cars, bicycles, etc.) move forward, while trying to keep accident risks low. Especially at intersections, the combination and interaction of traffic elements is diverse and human drivers need to focus on specific elements which are critical for their behavior. To support the analysis, we present in this paper the so-called Risk Navigation System (RNS). RNS leverages a graph-based local dynamic map with Time-To-X indicators for extracting upcoming sharp curves, intersection zones and possible vehicle-to-object collision points. In real car recordings, recommended velocity profiles to avoid risks are visualized within a 2D environment. By focusing on communicating not only the positional but also the temporal relation, RNS potentially helps to enhance awareness and prediction capabilities of the user.
Optimization of Velocity Ramps with Survival Analysis for Intersection Merge-Ins
Mar 13, 2023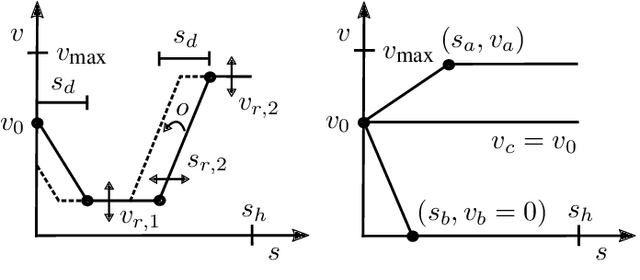



We consider the problem of correct motion planning for T-intersection merge-ins of arbitrary geometry and vehicle density. A merge-in support system has to estimate the chances that a gap between two consecutive vehicles can be taken successfully. In contrast to previous models based on heuristic gap size rules, we present an approach which optimizes the integral risk of the situation using parametrized velocity ramps. It accounts for the risks from curves and all involved vehicles (front and rear on all paths) with a so-called survival analysis. For comparison, we also introduce a specially designed extension of the Intelligent Driver Model (IDM) for entering intersections. We show in a quantitative statistical evaluation that the survival method provides advantages in terms of lower absolute risk (i.e., no crash happens) and better risk-utility tradeoff (i.e., making better use of appearing gaps). Furthermore, our approach generalizes to more complex situations with additional risk sources.
Importance Filtering with Risk Models for Complex Driving Situations
Mar 13, 2023
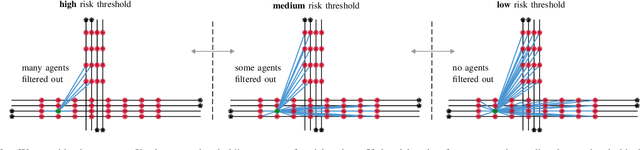


Self-driving cars face complex driving situations with a large amount of agents when moving in crowded cities. However, some of the agents are actually not influencing the behavior of the self-driving car. Filtering out unimportant agents would inherently simplify the behavior or motion planning task for the system. The planning system can then focus on fewer agents to find optimal behavior solutions for the ego~agent. This is helpful especially in terms of computational efficiency. In this paper, therefore, the research topic of importance filtering with driving risk models is introduced. We give an overview of state-of-the-art risk models and present newly adapted risk models for filtering. Their capability to filter out surrounding unimportant agents is compared in a large-scale experiment. As it turns out, the novel trajectory distance balances performance, robustness and efficiency well. Based on the results, we can further derive a novel filter architecture with multiple filter steps, for which risk models are recommended for each step, to further improve the robustness. We are confident that this will enable current behavior planning systems to better solve complex situations in everyday driving.