 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStaR Maps: Unveiling Uncertainty in Geospatial Relations
Paper and Code
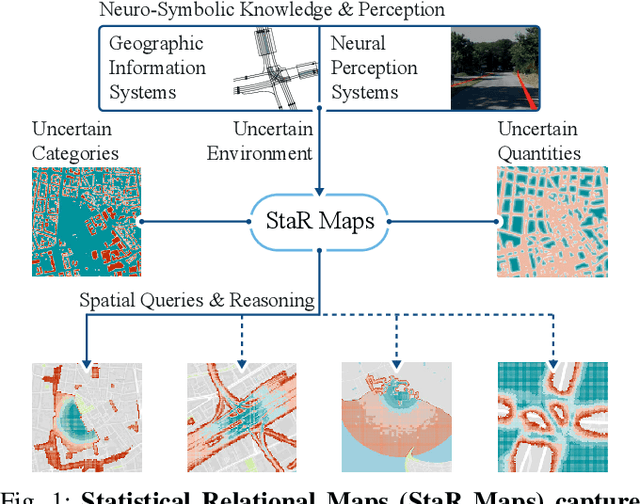

The growing complexity of intelligent transportation systems and their applications in public spaces has increased the demand for expressive and versatile knowledge representation. While various mapping efforts have achieved widespread coverage, including detailed annotation of features with semantic labels, it is essential to understand their inherent uncertainties, which are commonly underrepresented by the respective geographic information systems. Hence, it is critical to develop a representation that combines a statistical, probabilistic perspective with the relational nature of geospatial data. Further, such a representation should facilitate an honest view of the data's accuracy and provide an environment for high-level reasoning to obtain novel insights from task-dependent queries. Our work addresses this gap in two ways. First, we present Statistical Relational Maps (StaR Maps) as a representation of uncertain, semantic map data. Second, we demonstrate efficient computation of StaR Maps to scale the approach to wide urban spaces. Through experiments on real-world, crowd-sourced data, we underpin the application and utility of StaR Maps in terms of representing uncertain knowledge and reasoning for complex geospatial information.