 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Remote Driver Performance in Urban Environment Operational Design Domains
Paper and Code
Mar 29, 2025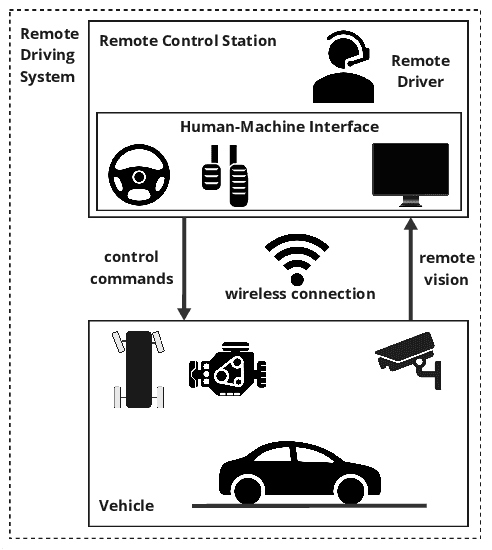
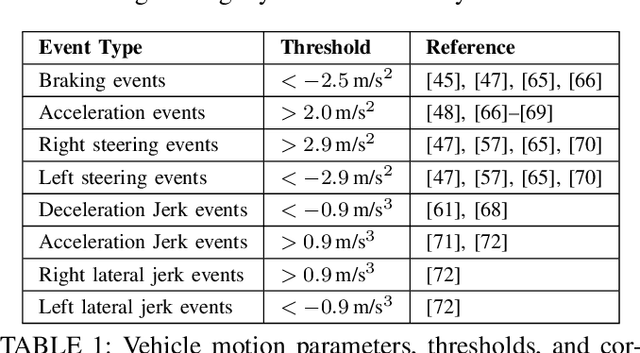
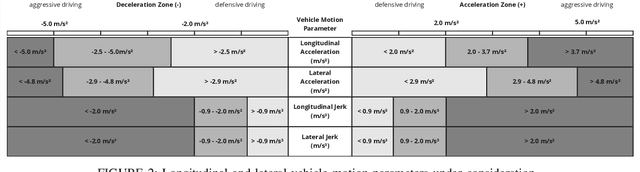
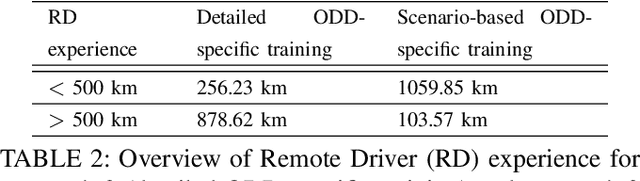
Remote driving has emerged as a solution for enabling human intervention in scenarios where Automated Driving Systems (ADS) face challenges, particularly in urban Operational Design Domains (ODDs). This study evaluates the performance of Remote Drivers (RDs) of passenger cars in a representative urban ODD in Las Vegas, focusing on the influence of cumulative driving experience and targeted training approaches. Using performance metrics such as efficiency, braking, acceleration, and steering, the study shows that driving experience can lead to noticeable improvements of RDs and demonstrates how experience up to 600 km correlates with improved vehicle control. In addition, driving efficiency exhibited a positive trend with increasing kilometers, particularly during the first 300 km of experience, which reaches a plateau from 400 km within a range of 0.35 to 0.42 km/min in the defined ODD. The research further compares ODD-specific training methods, where the detailed ODD training approaches attains notable advantages over other training approaches. The findings underscore the importance of tailored ODD training in enhancing RD performance, safety, and scalability for Remote Driving System (RDS) in real-world applications, while identifying opportunities for optimizing training protocols to address both routine and extreme scenarios. The study provides a robust foundation for advancing RDS deployment within urban environments, contributing to the development of scalable and safety-critical remote operation standards.