 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Predictive Control for Large-Scale Urban Road Networks
Jun 14, 2024

Transportation is a major contributor to CO2 emissions, making it essential to optimize traffic networks to reduce energy-related emissions. This paper presents a novel approach to traffic network control using Differentiable Predictive Control (DPC), a physics-informed machine learning methodology. We base our model on the Macroscopic Fundamental Diagram (MFD) and the Networked Macroscopic Fundamental Diagram (NMFD), offering a simplified representation of citywide traffic networks. Our approach ensures compliance with system constraints by construction. In empirical comparisons with existing state-of-the-art Model Predictive Control (MPC) methods, our approach demonstrates a 4 order of magnitude reduction in computation time and an up to 37% improvement in traffic performance. Furthermore, we assess the robustness of our controller to scenario shifts and find that it adapts well to changes in traffic patterns. This work proposes more efficient traffic control methods, particularly in large-scale urban networks, and aims to mitigate emissions and alleviate congestion in the future.
Physics-Informed Machine Learning for Modeling and Control of Dynamical Systems
Jun 24, 2023Physics-informed machine learning (PIML) is a set of methods and tools that systematically integrate machine learning (ML) algorithms with physical constraints and abstract mathematical models developed in scientific and engineering domains. As opposed to purely data-driven methods, PIML models can be trained from additional information obtained by enforcing physical laws such as energy and mass conservation. More broadly, PIML models can include abstract properties and conditions such as stability, convexity, or invariance. The basic premise of PIML is that the integration of ML and physics can yield more effective, physically consistent, and data-efficient models. This paper aims to provide a tutorial-like overview of the recent advances in PIML for dynamical system modeling and control. Specifically, the paper covers an overview of the theory, fundamental concepts and methods, tools, and applications on topics of: 1) physics-informed learning for system identification; 2) physics-informed learning for control; 3) analysis and verification of PIML models; and 4) physics-informed digital twins. The paper is concluded with a perspective on open challenges and future research opportunities.
Physics-constrained Deep Learning of Multi-zone Building Thermal Dynamics
Nov 11, 2020
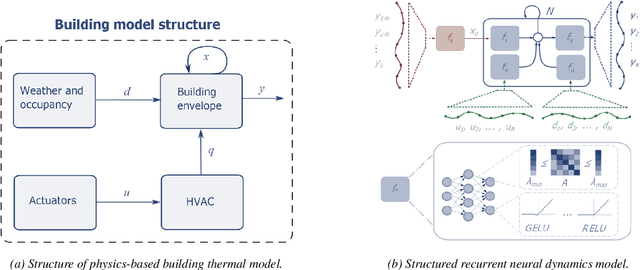
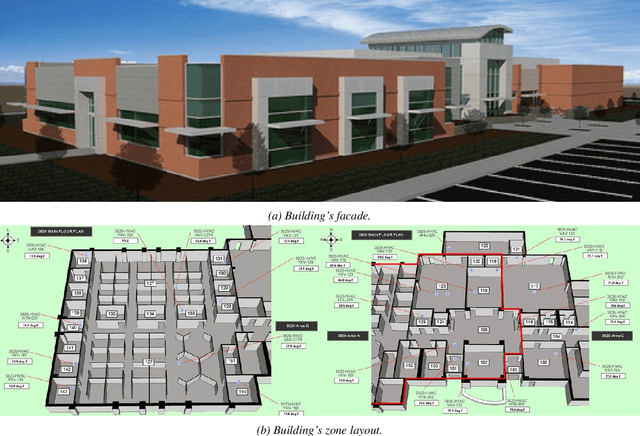
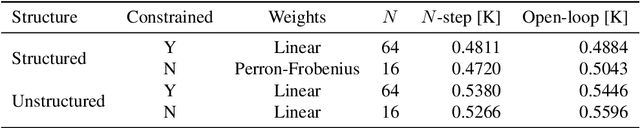
We present a physics-constrained control-oriented deep learning method for modeling building thermal dynamics. The proposed method is based on the systematic encoding of physics-based prior knowledge into a structured recurrent neural architecture. Specifically, our method incorporates structural priors from traditional physics-based building modeling into the neural network thermal dynamics model structure. Further, we leverage penalty methods to provide inequality constraints, thereby bounding predictions within physically realistic and safe operating ranges. Observing that stable eigenvalues accurately characterize the dissipativeness of the system, we additionally use a constrained matrix parameterization based on the Perron-Frobenius theorem to bound the dominant eigenvalues of the building thermal model parameter matrices. We demonstrate the proposed data-driven modeling approach's effectiveness and physical interpretability on a dataset obtained from a real-world office building with 20 thermal zones. Using only 10 days' measurements for training, we demonstrate generalization over 20 consecutive days, significantly improving the accuracy compared to prior state-of-the-art results reported in the literature.