 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProJo4D: Progressive Joint Optimization for Sparse-View Inverse Physics Estimation
Jun 05, 2025Neural rendering has made significant strides in 3D reconstruction and novel view synthesis. With the integration with physics, it opens up new applications. The inverse problem of estimating physics from visual data, however, still remains challenging, limiting its effectiveness for applications like physically accurate digital twin creation in robotics and XR. Existing methods that incorporate physics into neural rendering frameworks typically require dense multi-view videos as input, making them impractical for scalable, real-world use. When presented with sparse multi-view videos, the sequential optimization strategy used by existing approaches introduces significant error accumulation, e.g., poor initial 3D reconstruction leads to bad material parameter estimation in subsequent stages. Instead of sequential optimization, directly optimizing all parameters at the same time also fails due to the highly non-convex and often non-differentiable nature of the problem. We propose ProJo4D, a progressive joint optimization framework that gradually increases the set of jointly optimized parameters guided by their sensitivity, leading to fully joint optimization over geometry, appearance, physical state, and material property. Evaluations on PAC-NeRF and Spring-Gaus datasets show that ProJo4D outperforms prior work in 4D future state prediction, novel view rendering of future state, and material parameter estimation, demonstrating its effectiveness in physically grounded 4D scene understanding. For demos, please visit the project webpage: https://daniel03c1.github.io/ProJo4D/
Geometry-aware PINNs for Turbulent Flow Prediction
Dec 02, 2024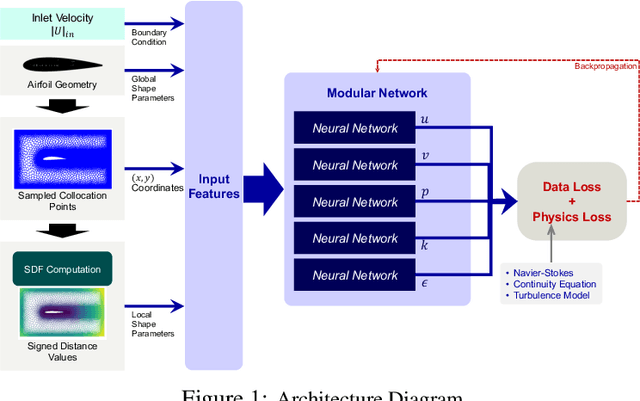
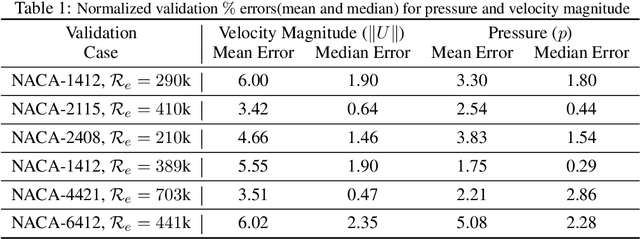
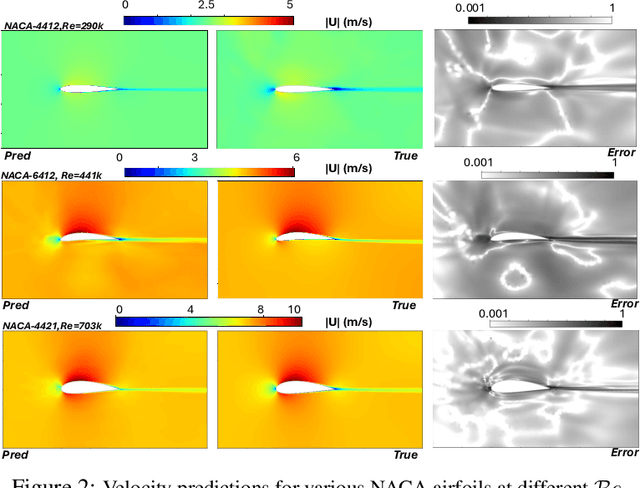
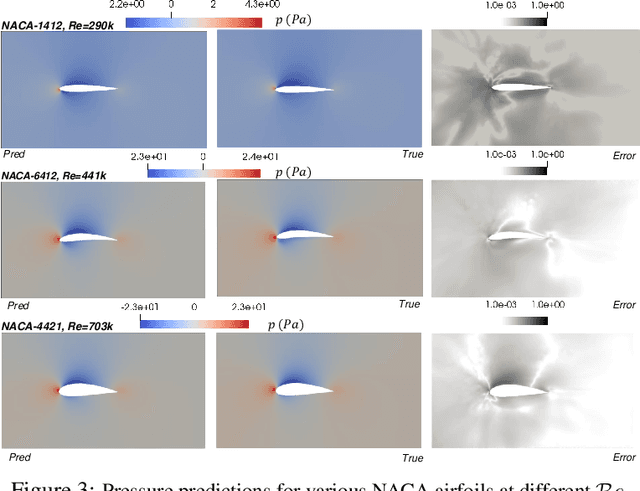
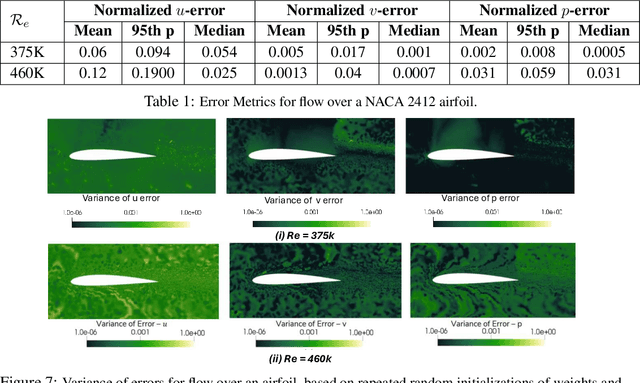
Design exploration or optimization using computational fluid dynamics (CFD) is commonly used in the industry. Geometric variation is a key component of such design problems, especially in turbulent flow scenarios, which involves running costly simulations at every design iteration. While parametric RANS-PINN type approaches have been proven to make effective turbulent surrogates, as a means of predicting unknown Reynolds number flows for a given geometry at near real-time, geometry aware physics informed surrogates with the ability to predict varying geometries are a relatively less studied topic. A novel geometry aware parametric PINN surrogate model has been created, which can predict flow fields for NACA 4 digit airfoils in turbulent conditions, for unseen shapes as well as inlet flow conditions. A local+global approach for embedding has been proposed, where known global design parameters for an airfoil as well as local SDF values can be used as inputs to the model along with velocity inlet/Reynolds number ($\mathcal{R}_e$) to predict the flow fields. A RANS formulation of the Navier-Stokes equations with a 2-equation k-epsilon turbulence model has been used for the PDE losses, in addition to limited CFD data from 8 different NACA airfoils for training. The models have then been validated with unknown NACA airfoils at unseen Reynolds numbers.
Using Parametric PINNs for Predicting Internal and External Turbulent Flows
Oct 24, 2024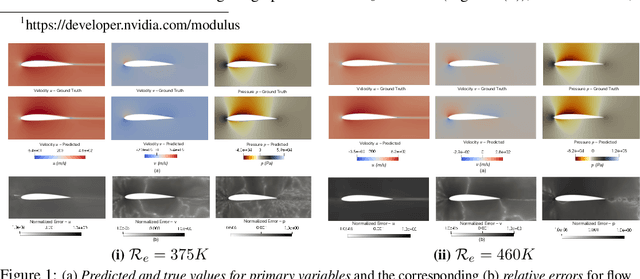
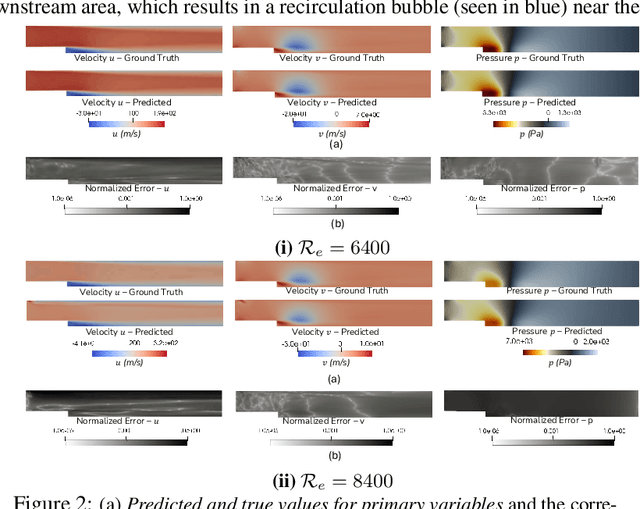
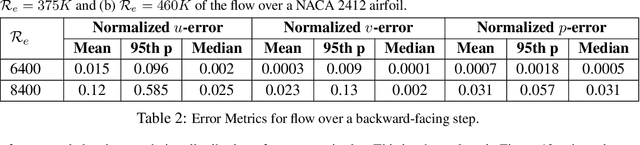
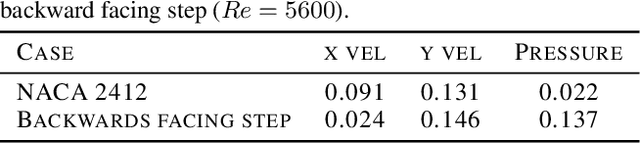
Computational fluid dynamics (CFD) solvers employing two-equation eddy viscosity models are the industry standard for simulating turbulent flows using the Reynolds-averaged Navier-Stokes (RANS) formulation. While these methods are computationally less expensive than direct numerical simulations, they can still incur significant computational costs to achieve the desired accuracy. In this context, physics-informed neural networks (PINNs) offer a promising approach for developing parametric surrogate models that leverage both existing, but limited CFD solutions and the governing differential equations to predict simulation outcomes in a computationally efficient, differentiable, and near real-time manner. In this work, we build upon the previously proposed RANS-PINN framework, which only focused on predicting flow over a cylinder. To investigate the efficacy of RANS-PINN as a viable approach to building parametric surrogate models, we investigate its accuracy in predicting relevant turbulent flow variables for both internal and external flows. To ensure training convergence with a more complex loss function, we adopt a novel sampling approach that exploits the domain geometry to ensure a proper balance among the contributions from various regions within the solution domain. The effectiveness of this framework is then demonstrated for two scenarios that represent a broad class of internal and external flow problems.
Physics-Informed Machine Learning for Modeling and Control of Dynamical Systems
Jun 24, 2023Physics-informed machine learning (PIML) is a set of methods and tools that systematically integrate machine learning (ML) algorithms with physical constraints and abstract mathematical models developed in scientific and engineering domains. As opposed to purely data-driven methods, PIML models can be trained from additional information obtained by enforcing physical laws such as energy and mass conservation. More broadly, PIML models can include abstract properties and conditions such as stability, convexity, or invariance. The basic premise of PIML is that the integration of ML and physics can yield more effective, physically consistent, and data-efficient models. This paper aims to provide a tutorial-like overview of the recent advances in PIML for dynamical system modeling and control. Specifically, the paper covers an overview of the theory, fundamental concepts and methods, tools, and applications on topics of: 1) physics-informed learning for system identification; 2) physics-informed learning for control; 3) analysis and verification of PIML models; and 4) physics-informed digital twins. The paper is concluded with a perspective on open challenges and future research opportunities.
RANS-PINN based Simulation Surrogates for Predicting Turbulent Flows
Jun 22, 2023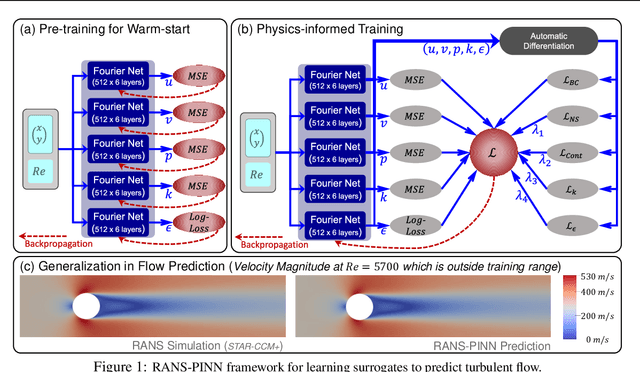
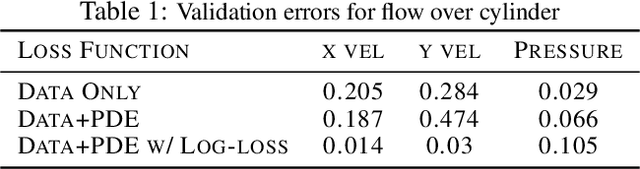

Physics-informed neural networks (PINNs) provide a framework to build surrogate models for dynamical systems governed by differential equations. During the learning process, PINNs incorporate a physics-based regularization term within the loss function to enhance generalization performance. Since simulating dynamics controlled by partial differential equations (PDEs) can be computationally expensive, PINNs have gained popularity in learning parametric surrogates for fluid flow problems governed by Navier-Stokes equations. In this work, we introduce RANS-PINN, a modified PINN framework, to predict flow fields (i.e., velocity and pressure) in high Reynolds number turbulent flow regime. To account for the additional complexity introduced by turbulence, RANS-PINN employs a 2-equation eddy viscosity model based on a Reynolds-averaged Navier-Stokes (RANS) formulation. Furthermore, we adopt a novel training approach that ensures effective initialization and balance among the various components of the loss function. The effectiveness of RANS-PINN framework is then demonstrated using a parametric PINN.
Improving Gradient Computation for Differentiable Physics Simulation with Contacts
Apr 28, 2023Differentiable simulation enables gradients to be back-propagated through physics simulations. In this way, one can learn the dynamics and properties of a physics system by gradient-based optimization or embed the whole differentiable simulation as a layer in a deep learning model for downstream tasks, such as planning and control. However, differentiable simulation at its current stage is not perfect and might provide wrong gradients that deteriorate its performance in learning tasks. In this paper, we study differentiable rigid-body simulation with contacts. We find that existing differentiable simulation methods provide inaccurate gradients when the contact normal direction is not fixed - a general situation when the contacts are between two moving objects. We propose to improve gradient computation by continuous collision detection and leverage the time-of-impact (TOI) to calculate the post-collision velocities. We demonstrate our proposed method, referred to as TOI-Velocity, on two optimal control problems. We show that with TOI-Velocity, we are able to learn an optimal control sequence that matches the analytical solution, while without TOI-Velocity, existing differentiable simulation methods fail to do so.
* 5th Annual Conference on Learning for Dynamics and Control
A Neural ODE Interpretation of Transformer Layers
Dec 12, 2022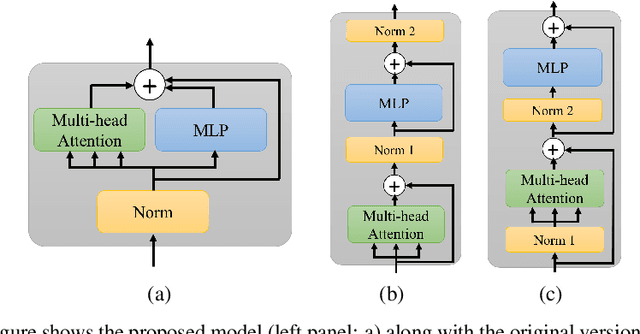
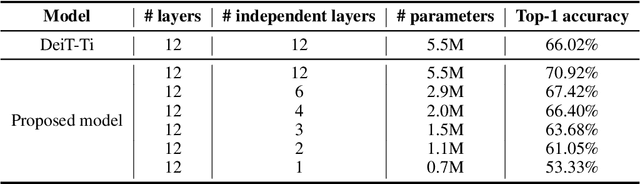
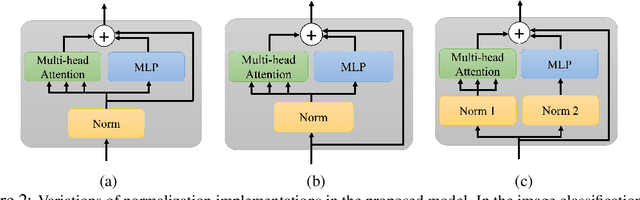
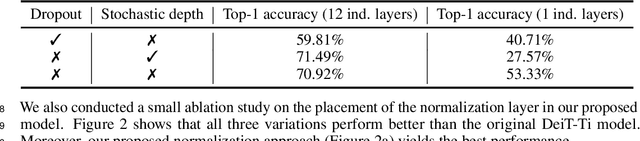
Transformer layers, which use an alternating pattern of multi-head attention and multi-layer perceptron (MLP) layers, provide an effective tool for a variety of machine learning problems. As the transformer layers use residual connections to avoid the problem of vanishing gradients, they can be viewed as the numerical integration of a differential equation. In this extended abstract, we build upon this connection and propose a modification of the internal architecture of a transformer layer. The proposed model places the multi-head attention sublayer and the MLP sublayer parallel to each other. Our experiments show that this simple modification improves the performance of transformer networks in multiple tasks. Moreover, for the image classification task, we show that using neural ODE solvers with a sophisticated integration scheme further improves performance.
EMVLight: a Multi-agent Reinforcement Learning Framework for an Emergency Vehicle Decentralized Routing and Traffic Signal Control System
Jun 29, 2022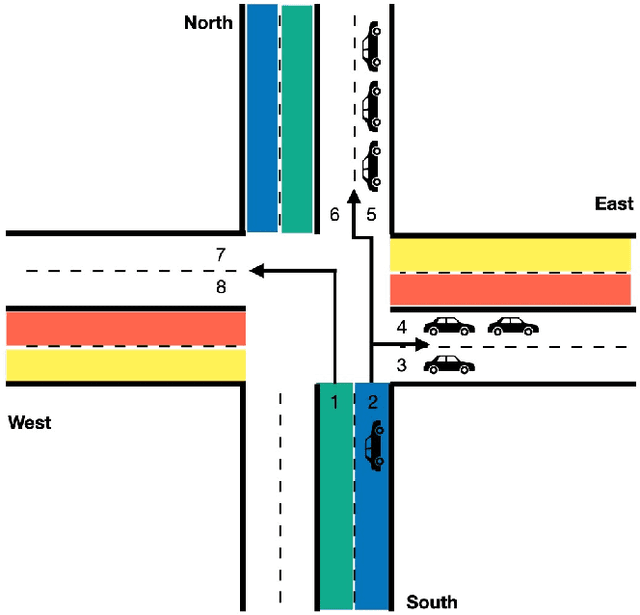


Emergency vehicles (EMVs) play a crucial role in responding to time-critical calls such as medical emergencies and fire outbreaks in urban areas. Existing methods for EMV dispatch typically optimize routes based on historical traffic-flow data and design traffic signal pre-emption accordingly; however, we still lack a systematic methodology to address the coupling between EMV routing and traffic signal control. In this paper, we propose EMVLight, a decentralized reinforcement learning (RL) framework for joint dynamic EMV routing and traffic signal pre-emption. We adopt the multi-agent advantage actor-critic method with policy sharing and spatial discounted factor. This framework addresses the coupling between EMV navigation and traffic signal control via an innovative design of multi-class RL agents and a novel pressure-based reward function. The proposed methodology enables EMVLight to learn network-level cooperative traffic signal phasing strategies that not only reduce EMV travel time but also shortens the travel time of non-EMVs. Simulation-based experiments indicate that EMVLight enables up to a $42.6\%$ reduction in EMV travel time as well as an $23.5\%$ shorter average travel time compared with existing approaches.
Demystifying the Data Need of ML-surrogates for CFD Simulations
May 05, 2022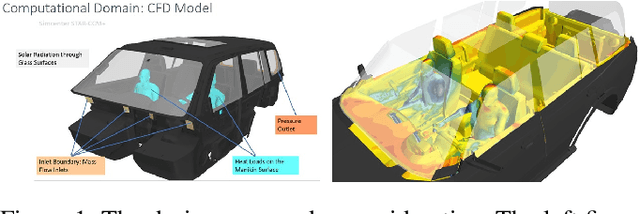
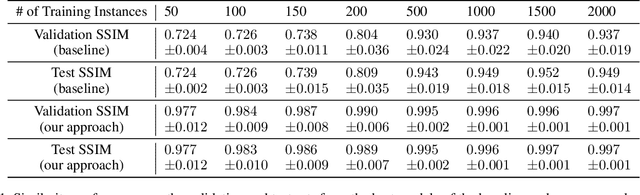
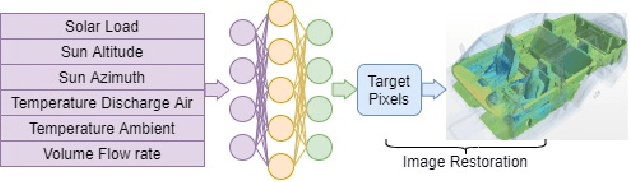
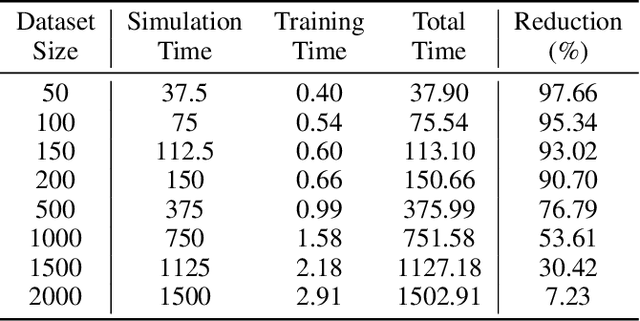
Computational fluid dynamics (CFD) simulations, a critical tool in various engineering applications, often require significant time and compute power to predict flow properties. The high computational cost associated with CFD simulations significantly restricts the scope of design space exploration and limits their use in planning and operational control. To address this issue, machine learning (ML) based surrogate models have been proposed as a computationally efficient tool to accelerate CFD simulations. However, a lack of clarity about CFD data requirements often challenges the widespread adoption of ML-based surrogates among design engineers and CFD practitioners. In this work, we propose an ML-based surrogate model to predict the temperature distribution inside the cabin of a passenger vehicle under various operating conditions and use it to demonstrate the trade-off between prediction performance and training dataset size. Our results show that the prediction accuracy is high and stable even when the training size is gradually reduced from 2000 to 200. The ML-based surrogates also reduce the compute time from ~30 minutes to around ~9 milliseconds. Moreover, even when only 50 CFD simulations are used for training, the temperature trend (e.g., locations of hot/cold regions) predicted by the ML-surrogate matches quite well with the results from CFD simulations.
Physics-informed neural networks for modeling rate- and temperature-dependent plasticity
Jan 20, 2022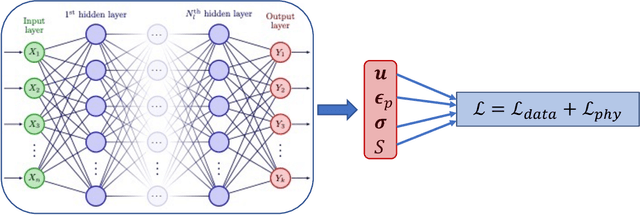

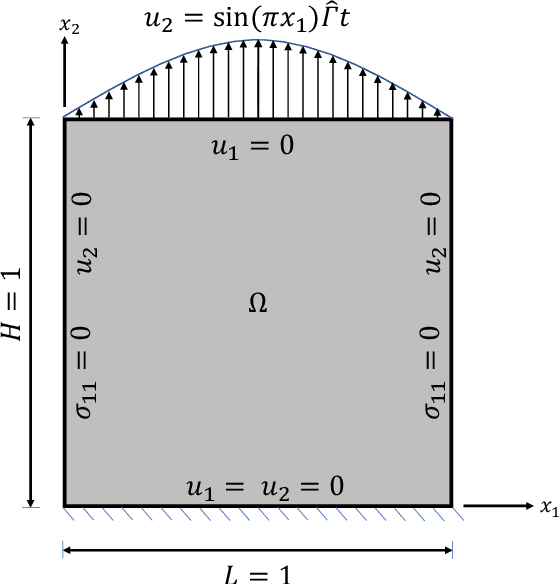
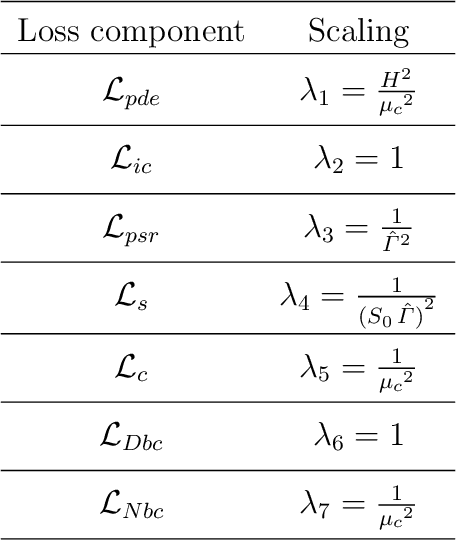
This work presents a physics-informed neural network based framework to model the strain-rate and temperature dependence of the deformation fields (displacement, stress, plastic strain) in elastic-viscoplastic solids. A detailed discussion on the construction of the physics-based loss criterion along with a brief outline on ways to avoid unbalanced back-propagated gradients during training is also presented. We also present a simple strategy with no added computational complexity for choosing scalar weights that balance the interplay between different terms in the composite loss. Moreover, we also highlight a fundamental challenge involving selection of appropriate model outputs so that the mechanical problem can be faithfully solved using neural networks. Finally, the effectiveness of the proposed framework is demonstrated by studying two test problems modeling the elastic-viscoplastic deformation in solids at different strain-rates and temperatures, respectively.