 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Whole-Body Loco-Manipulation via Combined Model and Learning-based Control
Mar 02, 2026Simultaneous locomotion and manipulation enables robots to interact with their environment beyond the constraints of a fixed base. However, coordinating legged locomotion with arm manipulation, while considering safety and compliance during contact interaction remains challenging. To this end, we propose a whole-body controller that combines a model-based admittance control for the manipulator arm with a Reinforcement Learning (RL) policy for legged locomotion. The admittance controller maps external wrenches--such as those applied by a human during physical interaction--into desired end-effector velocities, allowing for compliant behavior. The velocities are tracked jointly by the arm and leg controllers, enabling a unified 6-DoF force response. The model-based design permits accurate force control and safety guarantees via a Reference Governor (RG), while robustness is further improved by a Kalman filter enhanced with neural networks for reliable base velocity estimation. We validate our approach in both simulation and hardware using the Unitree Go2 quadruped robot with a 6-DoF arm and wrist-mounted 6-DoF Force/Torque sensor. Results demonstrate accurate tracking of interaction-driven velocities, compliant behavior, and safe, reliable performance in dynamic settings.
PRISM: Performer RS-IMLE for Single-pass Multisensory Imitation Learning
Feb 02, 2026Robotic imitation learning typically requires models that capture multimodal action distributions while operating at real-time control rates and accommodating multiple sensing modalities. Although recent generative approaches such as diffusion models, flow matching, and Implicit Maximum Likelihood Estimation (IMLE) have achieved promising results, they often satisfy only a subset of these requirements. To address this, we introduce PRISM, a single-pass policy based on a batch-global rejection-sampling variant of IMLE. PRISM couples a temporal multisensory encoder (integrating RGB, depth, tactile, audio, and proprioception) with a linear-attention generator using a Performer architecture. We demonstrate the efficacy of PRISM on a diverse real-world hardware suite, including loco-manipulation using a Unitree Go2 with a 7-DoF arm D1 and tabletop manipulation with a UR5 manipulator. Across challenging physical tasks such as pre-manipulation parking, high-precision insertion, and multi-object pick-and-place, PRISM outperforms state-of-the-art diffusion policies by 10-25% in success rate while maintaining high-frequency (30-50 Hz) closed-loop control. We further validate our approach on large-scale simulation benchmarks, including CALVIN, MetaWorld, and Robomimic. In CALVIN (10% data split), PRISM improves success rates by approximately 25% over diffusion and approximately 20% over flow matching, while simultaneously reducing trajectory jerk by 20x-50x. These results position PRISM as a fast, accurate, and multisensory imitation policy that retains multimodal action coverage without the latency of iterative sampling.
Data-Driven Motion Planning for Uncertain Nonlinear Systems
Jul 31, 2025This paper proposes a data-driven motion-planning framework for nonlinear systems that constructs a sequence of overlapping invariant polytopes. Around each randomly sampled waypoint, the algorithm identifies a convex admissible region and solves data-driven linear-matrix-inequality problems to learn several ellipsoidal invariant sets together with their local state-feedback gains. The convex hull of these ellipsoids, still invariant under a piece-wise-affine controller obtained by interpolating the gains, is then approximated by a polytope. Safe transitions between nodes are ensured by verifying the intersection of consecutive convex-hull polytopes and introducing an intermediate node for a smooth transition. Control gains are interpolated in real time via simplex-based interpolation, keeping the state inside the invariant polytopes throughout the motion. Unlike traditional approaches that rely on system dynamics models, our method requires only data to compute safe regions and design state-feedback controllers. The approach is validated through simulations, demonstrating the effectiveness of the proposed method in achieving safe, dynamically feasible paths for complex nonlinear systems.
Delayed Expansion AGT: Kinodynamic Planning with Application to Tractor-Trailer Parking
Jun 16, 2025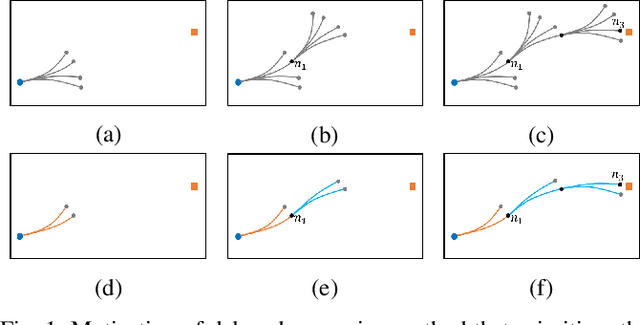
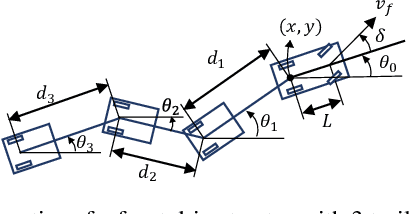
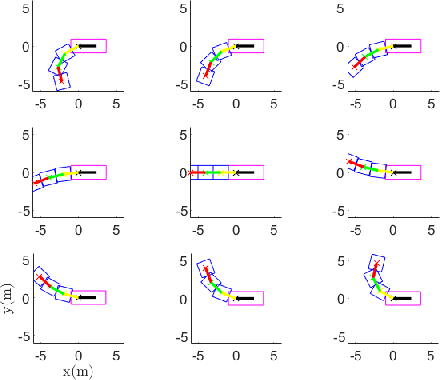
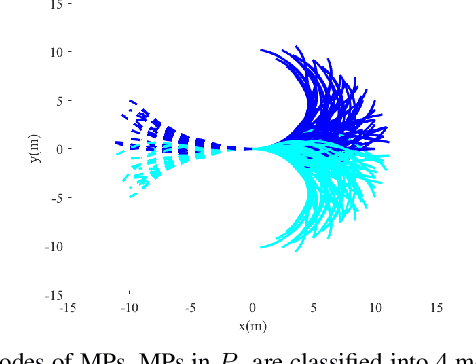
Kinodynamic planning of articulated vehicles in cluttered environments faces additional challenges arising from high-dimensional state space and complex system dynamics. Built upon [1],[2], this work proposes the DE-AGT algorithm that grows a tree using pre-computed motion primitives (MPs) and A* heuristics. The first feature of DE-AGT is a delayed expansion of MPs. In particular, the MPs are divided into different modes, which are ranked online. With the MP classification and prioritization, DE-AGT expands the most promising mode of MPs first, which eliminates unnecessary computation and finds solutions faster. To obtain the cost-to-go heuristic for nonholonomic articulated vehicles, we rely on supervised learning and train neural networks for fast and accurate cost-to-go prediction. The learned heuristic is used for online mode ranking and node selection. Another feature of DE-AGT is the improved goal-reaching. Exactly reaching a goal state usually requires a constant connection checking with the goal by solving steering problems -- non-trivial and time-consuming for articulated vehicles. The proposed termination scheme overcomes this challenge by tightly integrating a light-weight trajectory tracking controller with the search process. DE-AGT is implemented for autonomous parking of a general car-like tractor with 3-trailer. Simulation results show an average of 10x acceleration compared to a previous method.
Simultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal Locomotion
Apr 24, 2025In this paper we address the simultaneous collision detection and force estimation problem for quadrupedal locomotion using joint encoder information and the robot dynamics only. We design an interacting multiple-model Kalman filter (IMM-KF) that estimates the external force exerted on the robot and multiple possible contact modes. The method is invariant to any gait pattern design. Our approach leverages pseudo-measurement information of the external forces based on the robot dynamics and encoder information. Based on the estimated contact mode and external force, we design a reflex motion and an admittance controller for the swing leg to avoid collisions by adjusting the leg's reference motion. Additionally, we implement a force-adaptive model predictive controller to enhance balancing. Simulation ablatation studies and experiments show the efficacy of the approach.
Energy-Efficient Motion Planner for Legged Robots
Mar 08, 2025We propose an online motion planner for legged robot locomotion with the primary objective of achieving energy efficiency. The conceptual idea is to leverage a placement set of footstep positions based on the robot's body position to determine when and how to execute steps. In particular, the proposed planner uses virtual placement sets beneath the hip joints of the legs and executes a step when the foot is outside of such placement set. Furthermore, we propose a parameter design framework that considers both energy-efficiency and robustness measures to optimize the gait by changing the shape of the placement set along with other parameters, such as step height and swing time, as a function of walking speed. We show that the planner produces trajectories that have a low Cost of Transport (CoT) and high robustness measure, and evaluate our approach against model-free Reinforcement Learning (RL) and motion imitation using biological dog motion priors as the reference. Overall, within low to medium velocity range, we show a 50.4% improvement in CoT and improved robustness over model-free RL, our best performing baseline. Finally, we show ability to handle slippery surfaces, gait transitions, and disturbances in simulation and hardware with the Unitree A1 robot.
Data-driven Spatial Classification using Multi-Arm Bandits for Monitoring with Energy-Constrained Mobile Robots
Jan 14, 2025



We consider the spatial classification problem for monitoring using data collected by a coordinated team of mobile robots. Such classification problems arise in several applications including search-and-rescue and precision agriculture. Specifically, we want to classify the regions of a search environment into interesting and uninteresting as quickly as possible using a team of mobile sensors and mobile charging stations. We develop a data-driven strategy that accommodates the noise in sensed data and the limited energy capacity of the sensors, and generates collision-free motion plans for the team. We propose a bi-level approach, where a high-level planner leverages a multi-armed bandit framework to determine the potential regions of interest for the drones to visit next based on the data collected online. Then, a low-level path planner based on integer programming coordinates the paths for the team to visit the target regions subject to the physical constraints. We characterize several theoretical properties of the proposed approach, including anytime guarantees and task completion time. We show the efficacy of our approach in simulation, and further validate these observations in physical experiments using mobile robots.
Equivariant Deep Learning of Mixed-Integer Optimal Control Solutions for Vehicle Decision Making and Motion Planning
May 13, 2024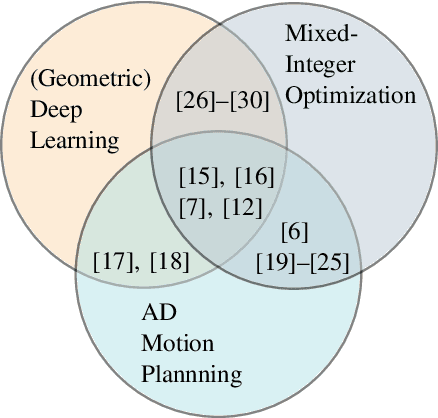
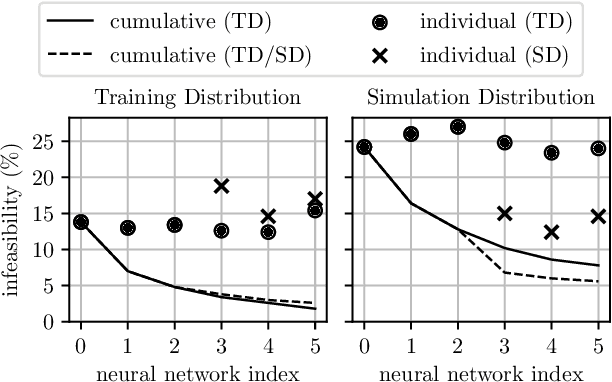
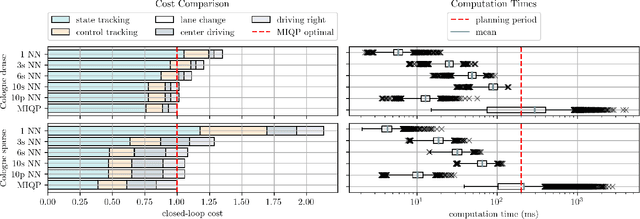
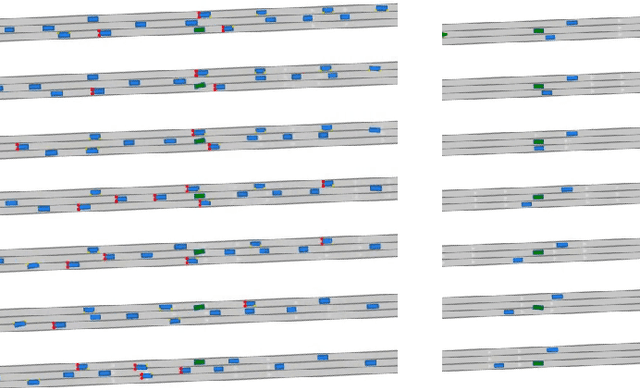
Mixed-integer quadratic programs (MIQPs) are a versatile way of formulating vehicle decision making and motion planning problems, where the prediction model is a hybrid dynamical system that involves both discrete and continuous decision variables. However, even the most advanced MIQP solvers can hardly account for the challenging requirements of automotive embedded platforms. Thus, we use machine learning to simplify and hence speed up optimization. Our work builds on recent ideas for solving MIQPs in real-time by training a neural network to predict the optimal values of integer variables and solving the remaining problem by online quadratic programming. Specifically, we propose a recurrent permutation equivariant deep set that is particularly suited for imitating MIQPs that involve many obstacles, which is often the major source of computational burden in motion planning problems. Our framework comprises also a feasibility projector that corrects infeasible predictions of integer variables and considerably increases the likelihood of computing a collision-free trajectory. We evaluate the performance, safety and real-time feasibility of decision-making for autonomous driving using the proposed approach on realistic multi-lane traffic scenarios with interactive agents in SUMO simulations.
Path Planning and Motion Control for Accurate Positioning of Car-like Robots
May 10, 2024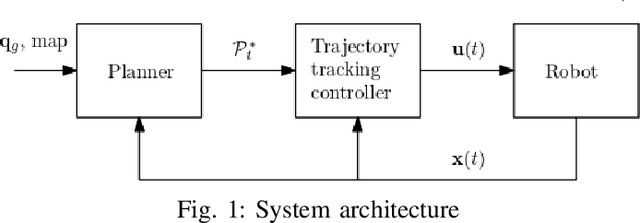
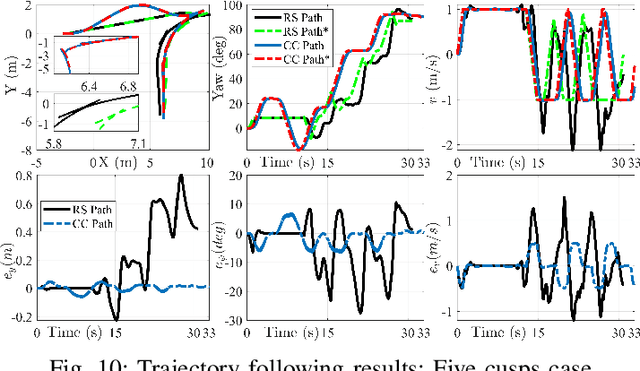
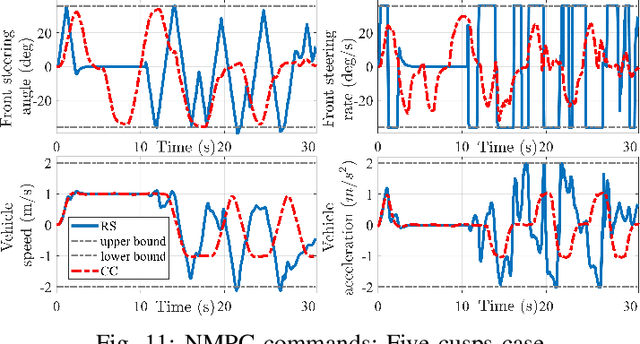
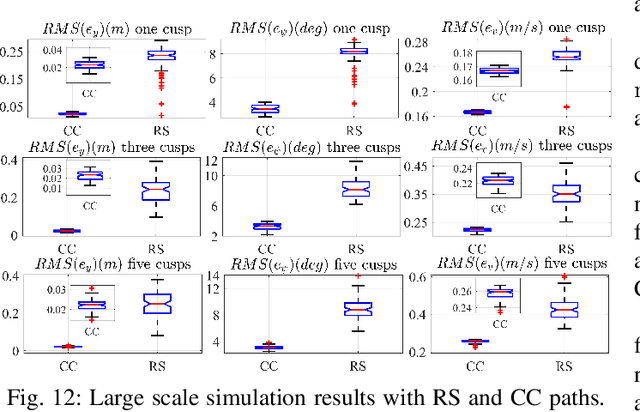
This paper investigates the planning and control for accurate positioning of car-like robots. We propose a solution that integrates two modules: a motion planner, facilitated by the rapidly-exploring random tree algorithm and continuous-curvature (CC) steering technique, generates a CC trajectory as a reference; and a nonlinear model predictive controller (NMPC) regulates the robot to accurately track the reference trajectory. Based on the $\mu$-tangency conditions in prior art, we derive explicit existence conditions and develop associated computation methods for a special class of CC paths which not only admit the same driving patterns as Reeds-Shepp paths but also consist of cusp-free clothoid turns. Afterwards, we create an autonomous vehicle parking scenario where the NMPC endeavors to follow the reference trajectory. Feasibility and computational efficiency of the CC steering are validated by numerical simulation. CarSim-Simulink joint simulations statistically verify that with exactly same NMPC, the closed-loop system with CC trajectories as references substantially outperforms the case where Reeds-Shepp trajectories are used as references.
Projection-free computation of robust controllable sets with constrained zonotopes
Mar 20, 2024We study the problem of computing robust controllable sets for discrete-time linear systems with additive uncertainty. We propose a tractable and scalable approach to inner- and outer-approximate robust controllable sets using constrained zonotopes, when the additive uncertainty set is a symmetric, convex, and compact set. Our least-squares-based approach uses novel closed-form approximations of the Pontryagin difference between a constrained zonotopic minuend and a symmetric, convex, and compact subtrahend. Unlike existing approaches, our approach does not rely on convex optimization solvers, and is projection-free for ellipsoidal and zonotopic uncertainty sets. We also propose a least-squares-based approach to compute a convex, polyhedral outer-approximation to constrained zonotopes, and characterize sufficient conditions under which all these approximations are exact. We demonstrate the computational efficiency and scalability of our approach in several case studies, including the design of abort-safe rendezvous trajectories for a spacecraft in near-rectilinear halo orbit under uncertainty. Our approach can inner-approximate a 20-step robust controllable set for a 100-dimensional linear system in under 15 seconds on a standard computer.