 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Spatial Classification using Multi-Arm Bandits for Monitoring with Energy-Constrained Mobile Robots
Jan 14, 2025



We consider the spatial classification problem for monitoring using data collected by a coordinated team of mobile robots. Such classification problems arise in several applications including search-and-rescue and precision agriculture. Specifically, we want to classify the regions of a search environment into interesting and uninteresting as quickly as possible using a team of mobile sensors and mobile charging stations. We develop a data-driven strategy that accommodates the noise in sensed data and the limited energy capacity of the sensors, and generates collision-free motion plans for the team. We propose a bi-level approach, where a high-level planner leverages a multi-armed bandit framework to determine the potential regions of interest for the drones to visit next based on the data collected online. Then, a low-level path planner based on integer programming coordinates the paths for the team to visit the target regions subject to the physical constraints. We characterize several theoretical properties of the proposed approach, including anytime guarantees and task completion time. We show the efficacy of our approach in simulation, and further validate these observations in physical experiments using mobile robots.
Identifying Differential Patient Care Through Inverse Intent Inference
Nov 11, 2024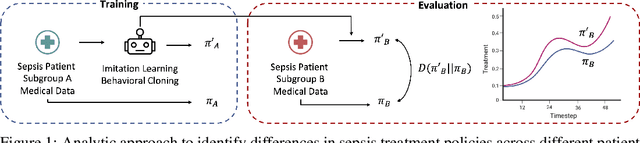

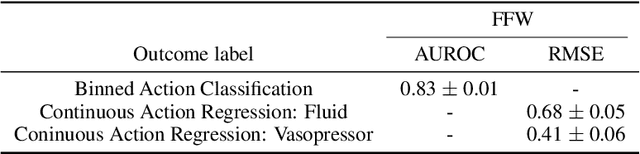
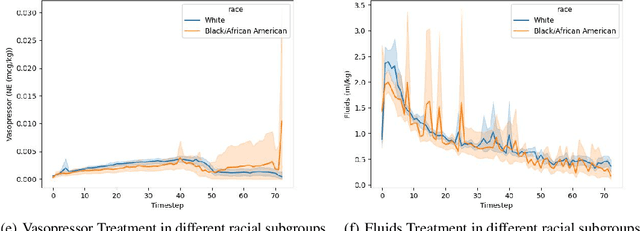
Sepsis is a life-threatening condition defined by end-organ dysfunction due to a dysregulated host response to infection. Although the Surviving Sepsis Campaign has launched and has been releasing sepsis treatment guidelines to unify and normalize the care for sepsis patients, it has been reported in numerous studies that disparities in care exist across the trajectory of patient stay in the emergency department and intensive care unit. Here, we apply a number of reinforcement learning techniques including behavioral cloning, imitation learning, and inverse reinforcement learning, to learn the optimal policy in the management of septic patient subgroups using expert demonstrations. Then we estimate the counterfactual optimal policies by applying the model to another subset of unseen medical populations and identify the difference in cure by comparing it to the real policy. Our data comes from the sepsis cohort of MIMIC-IV and the clinical data warehouses of the Mass General Brigham healthcare system. The ultimate objective of this work is to use the optimal learned policy function to estimate the counterfactual treatment policy and identify deviations across sub-populations of interest. We hope this approach would help us identify any disparities in care and also changes in cure in response to the publication of national sepsis treatment guidelines.
Cooperation and Fairness in Multi-Agent Reinforcement Learning
Oct 19, 2024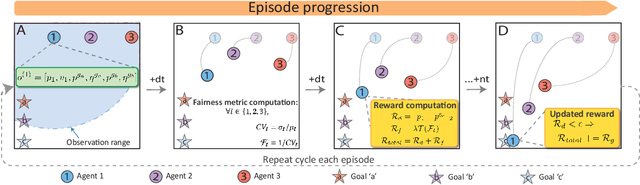

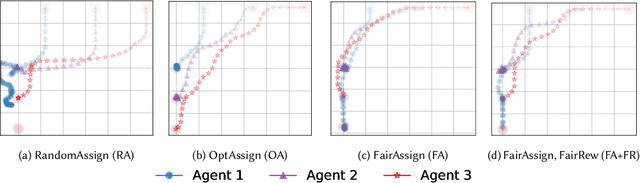
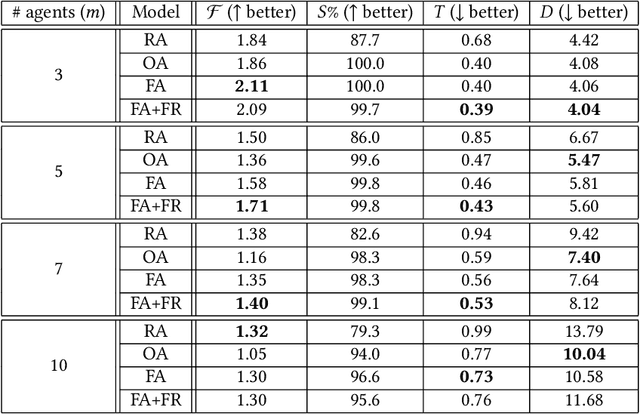
Multi-agent systems are trained to maximize shared cost objectives, which typically reflect system-level efficiency. However, in the resource-constrained environments of mobility and transportation systems, efficiency may be achieved at the expense of fairness -- certain agents may incur significantly greater costs or lower rewards compared to others. Tasks could be distributed inequitably, leading to some agents receiving an unfair advantage while others incur disproportionately high costs. It is important to consider the tradeoffs between efficiency and fairness. We consider the problem of fair multi-agent navigation for a group of decentralized agents using multi-agent reinforcement learning (MARL). We consider the reciprocal of the coefficient of variation of the distances traveled by different agents as a measure of fairness and investigate whether agents can learn to be fair without significantly sacrificing efficiency (i.e., increasing the total distance traveled). We find that by training agents using min-max fair distance goal assignments along with a reward term that incentivizes fairness as they move towards their goals, the agents (1) learn a fair assignment of goals and (2) achieve almost perfect goal coverage in navigation scenarios using only local observations. For goal coverage scenarios, we find that, on average, our model yields a 14% improvement in efficiency and a 5% improvement in fairness over a baseline trained using random assignments. Furthermore, an average of 21% improvement in fairness can be achieved compared to a model trained on optimally efficient assignments; this increase in fairness comes at the expense of only a 7% decrease in efficiency. Finally, we extend our method to environments in which agents must complete coverage tasks in prescribed formations and show that it is possible to do so without tailoring the models to specific formation shapes.
Long-Horizon Planning for Multi-Agent Robots in Partially Observable Environments
Jul 14, 2024



The ability of Language Models (LMs) to understand natural language makes them a powerful tool for parsing human instructions into task plans for autonomous robots. Unlike traditional planning methods that rely on domain-specific knowledge and handcrafted rules, LMs generalize from diverse data and adapt to various tasks with minimal tuning, acting as a compressed knowledge base. However, LMs in their standard form face challenges with long-horizon tasks, particularly in partially observable multi-agent settings. We propose an LM-based Long-Horizon Planner for Multi-Agent Robotics (LLaMAR), a cognitive architecture for planning that achieves state-of-the-art results in long-horizon tasks within partially observable environments. LLaMAR employs a plan-act-correct-verify framework, allowing self-correction from action execution feedback without relying on oracles or simulators. Additionally, we present MAP-THOR, a comprehensive test suite encompassing household tasks of varying complexity within the AI2-THOR environment. Experiments show that LLaMAR achieves a 30% higher success rate compared to other state-of-the-art LM-based multi-agent planners.
Scalable Multi-Agent Reinforcement Learning through Intelligent Information Aggregation
Nov 03, 2022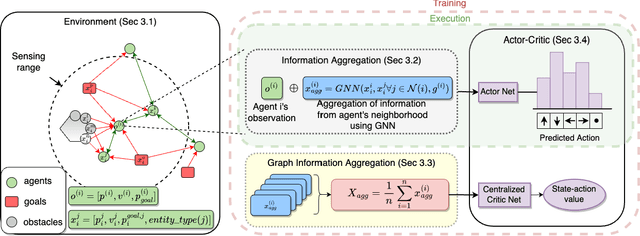
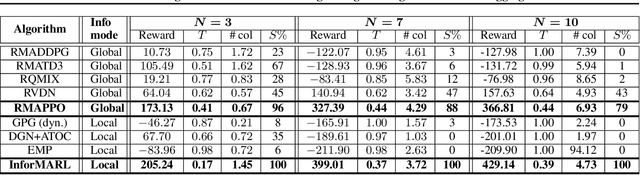
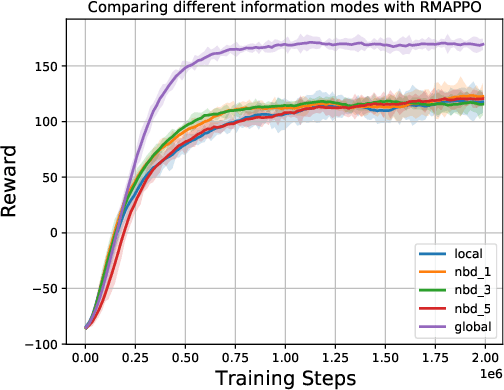
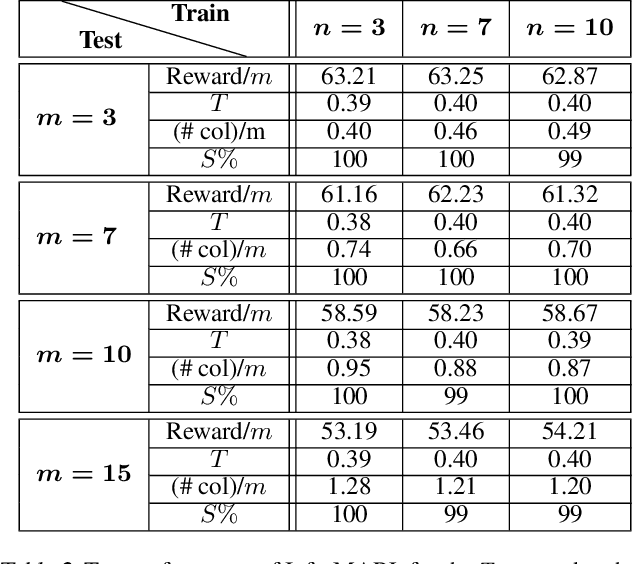
We consider the problem of multi-agent navigation and collision avoidance when observations are limited to the local neighborhood of each agent. We propose InforMARL, a novel architecture for multi-agent reinforcement learning (MARL) which uses local information intelligently to compute paths for all the agents in a decentralized manner. Specifically, InforMARL aggregates information about the local neighborhood of agents for both the actor and the critic using a graph neural network and can be used in conjunction with any standard MARL algorithm. We show that (1) in training, InforMARL has better sample efficiency and performance than baseline approaches, despite using less information, and (2) in testing, it scales well to environments with arbitrary numbers of agents and obstacles.
NICE: Robust Scheduling through Reinforcement Learning-Guided Integer Programming
Sep 24, 2021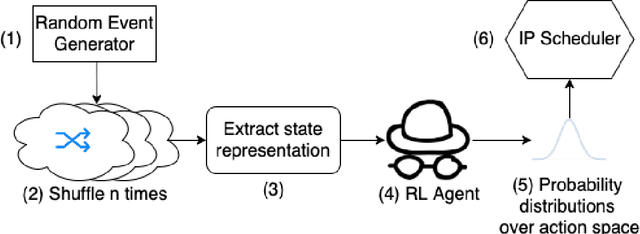
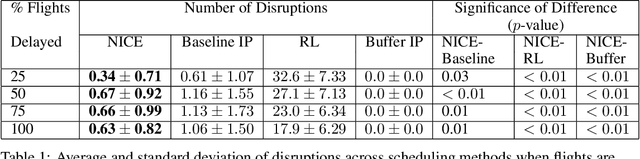
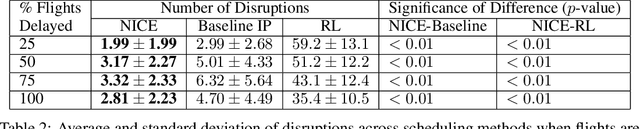
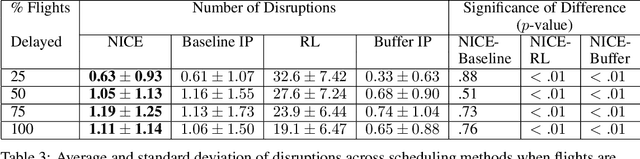
Integer programs provide a powerful abstraction for representing a wide range of real-world scheduling problems. Despite their ability to model general scheduling problems, solving large-scale integer programs (IP) remains a computational challenge in practice. The incorporation of more complex objectives such as robustness to disruptions further exacerbates the computational challenge. We present NICE (Neural network IP Coefficient Extraction), a novel technique that combines reinforcement learning and integer programming to tackle the problem of robust scheduling. More specifically, NICE uses reinforcement learning to approximately represent complex objectives in an integer programming formulation. We use NICE to determine assignments of pilots to a flight crew schedule so as to reduce the impact of disruptions. We compare NICE with (1) a baseline integer programming formulation that produces a feasible crew schedule, and (2) a robust integer programming formulation that explicitly tries to minimize the impact of disruptions. Our experiments show that, across a variety of scenarios, NICE produces schedules resulting in 33\% to 48\% fewer disruptions than the baseline formulation. Moreover, in more severely constrained scheduling scenarios in which the robust integer program fails to produce a schedule within 90 minutes, NICE is able to build robust schedules in less than 2 seconds on average.
Reinforcement Learning for Improving Object Detection
Aug 18, 2020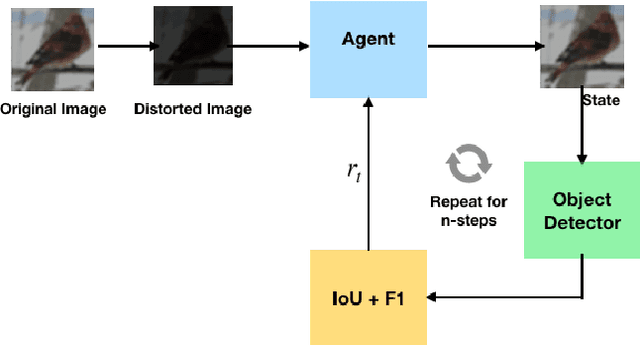
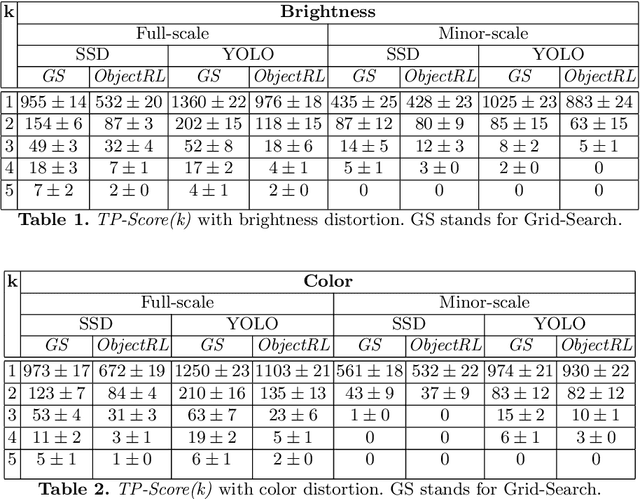


The performance of a trained object detection neural network depends a lot on the image quality. Generally, images are pre-processed before feeding them into the neural network and domain knowledge about the image dataset is used to choose the pre-processing techniques. In this paper, we introduce an algorithm called ObjectRL to choose the amount of a particular pre-processing to be applied to improve the object detection performances of pre-trained networks. The main motivation for ObjectRL is that an image which looks good to a human eye may not necessarily be the optimal one for a pre-trained object detector to detect objects.
A Generalized Reinforcement Learning Algorithm for Online 3D Bin-Packing
Jul 01, 2020
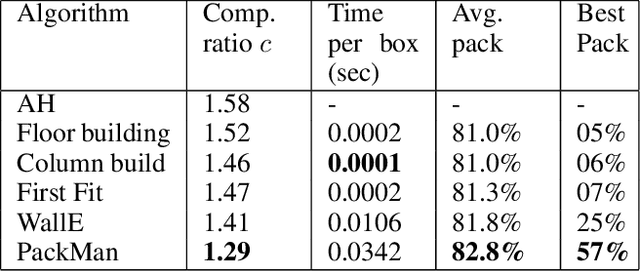
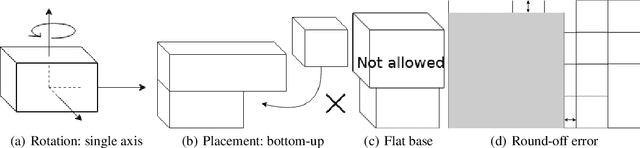
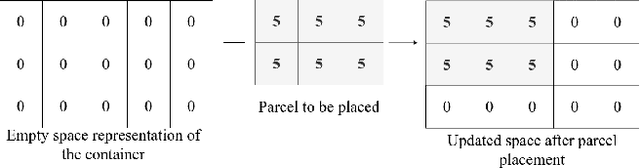
We propose a Deep Reinforcement Learning (Deep RL) algorithm for solving the online 3D bin packing problem for an arbitrary number of bins and any bin size. The focus is on producing decisions that can be physically implemented by a robotic loading arm, a laboratory prototype used for testing the concept. The problem considered in this paper is novel in two ways. First, unlike the traditional 3D bin packing problem, we assume that the entire set of objects to be packed is not known a priori. Instead, a fixed number of upcoming objects is visible to the loading system, and they must be loaded in the order of arrival. Second, the goal is not to move objects from one point to another via a feasible path, but to find a location and orientation for each object that maximises the overall packing efficiency of the bin(s). Finally, the learnt model is designed to work with problem instances of arbitrary size without retraining. Simulation results show that the RL-based method outperforms state-of-the-art online bin packing heuristics in terms of empirical competitive ratio and volume efficiency.