 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Multi-Agent Reinforcement Learning through Intelligent Information Aggregation
Nov 03, 2022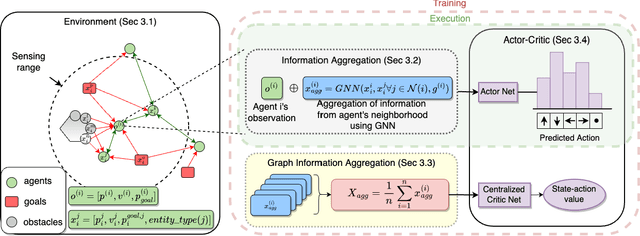
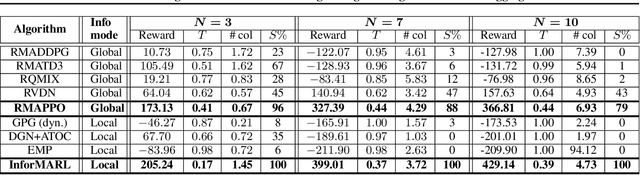
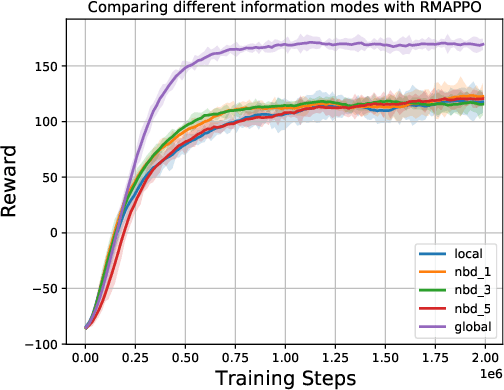
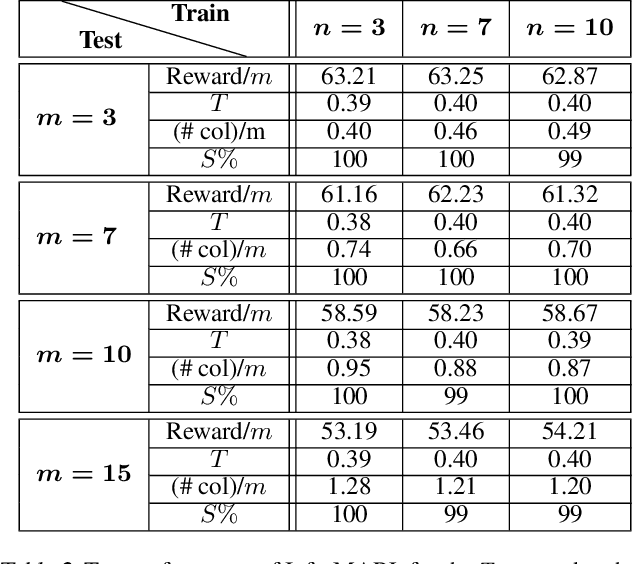
We consider the problem of multi-agent navigation and collision avoidance when observations are limited to the local neighborhood of each agent. We propose InforMARL, a novel architecture for multi-agent reinforcement learning (MARL) which uses local information intelligently to compute paths for all the agents in a decentralized manner. Specifically, InforMARL aggregates information about the local neighborhood of agents for both the actor and the critic using a graph neural network and can be used in conjunction with any standard MARL algorithm. We show that (1) in training, InforMARL has better sample efficiency and performance than baseline approaches, despite using less information, and (2) in testing, it scales well to environments with arbitrary numbers of agents and obstacles.
Differentially Private M-band Wavelet-Based Mechanisms in Machine Learning Environments
Feb 18, 2020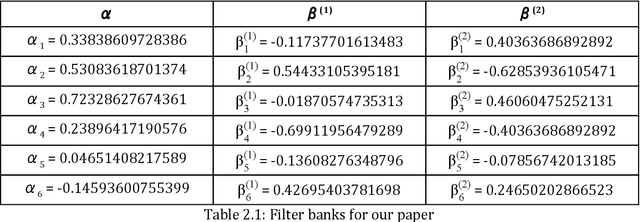
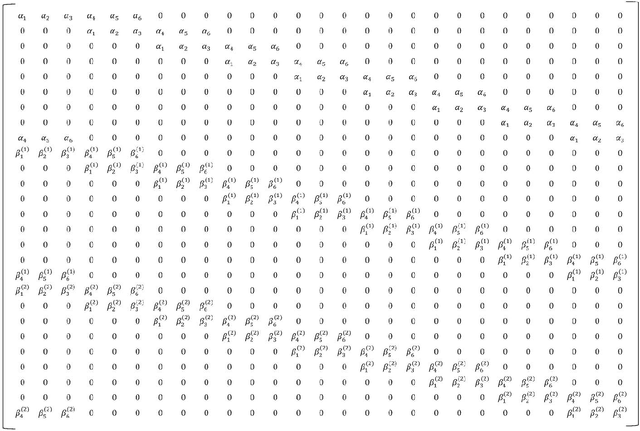
In the post-industrial world, data science and analytics have gained paramount importance regarding digital data privacy. Improper methods of establishing privacy for accessible datasets can compromise large amounts of user data even if the adversary has a small amount of preliminary knowledge of a user. Many researchers have been developing high-level privacy-preserving mechanisms that also retain the statistical integrity of the data to apply to machine learning. Recent developments of differential privacy, such as the Laplace and Privelet mechanisms, drastically decrease the probability that an adversary can distinguish the elements in a data set and thus extract user information. In this paper, we develop three privacy-preserving mechanisms with the discrete M-band wavelet transform that embed noise into data. The first two methods (LS and LS+) add noise through a Laplace-Sigmoid distribution that multiplies Laplace-distributed values with the sigmoid function, and the third method utilizes pseudo-quantum steganography to embed noise into the data. We then show that our mechanisms successfully retain both differential privacy and learnability through statistical analysis in various machine learning environments.