 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePowRL: A Reinforcement Learning Framework for Robust Management of Power Networks
Dec 05, 2022Power grids, across the world, play an important societal and economical role by providing uninterrupted, reliable and transient-free power to several industries, businesses and household consumers. With the advent of renewable power resources and EVs resulting into uncertain generation and highly dynamic load demands, it has become ever so important to ensure robust operation of power networks through suitable management of transient stability issues and localize the events of blackouts. In the light of ever increasing stress on the modern grid infrastructure and the grid operators, this paper presents a reinforcement learning (RL) framework, PowRL, to mitigate the effects of unexpected network events, as well as reliably maintain electricity everywhere on the network at all times. The PowRL leverages a novel heuristic for overload management, along with the RL-guided decision making on optimal topology selection to ensure that the grid is operated safely and reliably (with no overloads). PowRL is benchmarked on a variety of competition datasets hosted by the L2RPN (Learning to Run a Power Network). Even with its reduced action space, PowRL tops the leaderboard in the L2RPN NeurIPS 2020 challenge (Robustness track) at an aggregate level, while also being the top performing agent in the L2RPN WCCI 2020 challenge. Moreover, detailed analysis depicts state-of-the-art performances by the PowRL agent in some of the test scenarios.
Fast Approximate Solutions using Reinforcement Learning for Dynamic Capacitated Vehicle Routing with Time Windows
Feb 24, 2021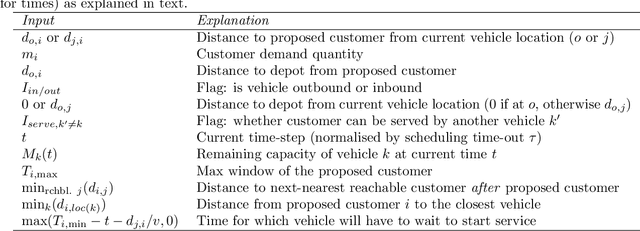
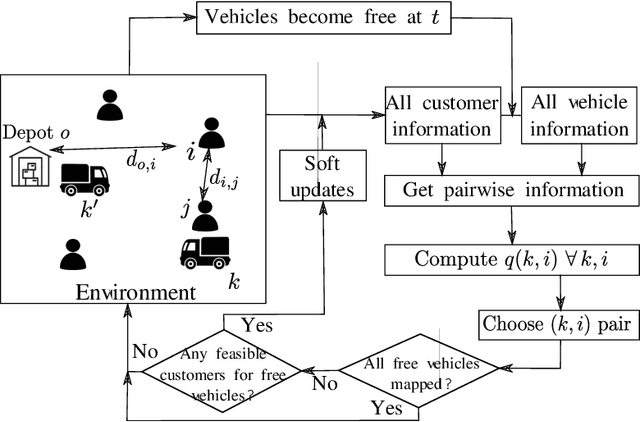
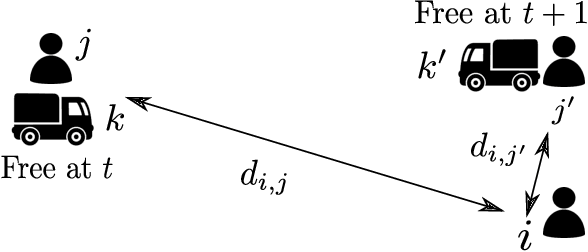
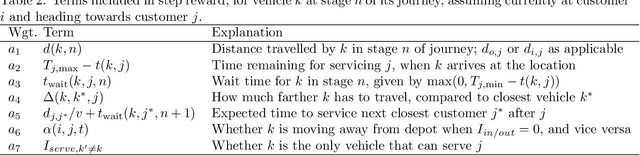
This paper develops an inherently parallelised, fast, approximate learning-based solution to the generic class of Capacitated Vehicle Routing with Time Windows and Dynamic Routing (CVRP-TWDR). Considering vehicles in a fleet as decentralised agents, we postulate that using reinforcement learning (RL) based adaptation is a key enabler for real-time route formation in a dynamic environment. The methodology allows each agent (vehicle) to independently evaluate the value of serving each customer, and uses a centralised allocation heuristic to finalise the allocations based on the generated values. We show that the solutions produced by this method on standard datasets are significantly faster than exact formulations and state-of-the-art meta-heuristics, while being reasonably close to optimal in terms of solution quality. We describe experiments in both the static case (when all customer demands and time windows are known in advance) as well as the dynamic case (where customers can `pop up' at any time during execution). The results with a single trained model on large, out-of-distribution test data demonstrate the scalability and flexibility of the proposed approach.
A Generalized Reinforcement Learning Algorithm for Online 3D Bin-Packing
Jul 01, 2020
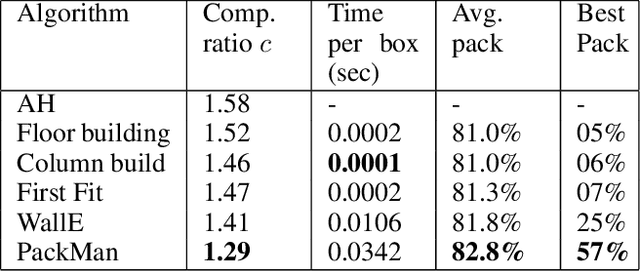
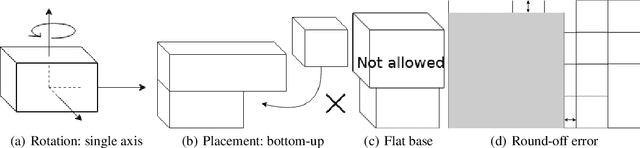
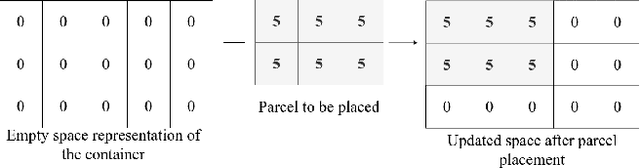
We propose a Deep Reinforcement Learning (Deep RL) algorithm for solving the online 3D bin packing problem for an arbitrary number of bins and any bin size. The focus is on producing decisions that can be physically implemented by a robotic loading arm, a laboratory prototype used for testing the concept. The problem considered in this paper is novel in two ways. First, unlike the traditional 3D bin packing problem, we assume that the entire set of objects to be packed is not known a priori. Instead, a fixed number of upcoming objects is visible to the loading system, and they must be loaded in the order of arrival. Second, the goal is not to move objects from one point to another via a feasible path, but to find a location and orientation for each object that maximises the overall packing efficiency of the bin(s). Finally, the learnt model is designed to work with problem instances of arbitrary size without retraining. Simulation results show that the RL-based method outperforms state-of-the-art online bin packing heuristics in terms of empirical competitive ratio and volume efficiency.