 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain-Independent Disperse and Pick method for Robotic Grasping
Dec 19, 2023Picking unseen objects from clutter is a difficult problem because of the variability in objects (shape, size, and material) and occlusion due to clutter. As a result, it becomes difficult for grasping methods to segment the objects properly and they fail to singulate the object to be picked. This may result in grasp failure or picking of multiple objects together in a single attempt. A push-to-move action by the robot will be beneficial to disperse the objects in the workspace and thus assist the grasping and vision algorithm. We propose a disperse and pick method for domain-independent robotic grasping in a highly cluttered heap of objects. The novel contribution of our framework is the introduction of a heuristic clutter removal method that does not require deep learning and can work on unseen objects. At each iteration of the algorithm, the robot either performs a push-to-move action or a grasp action based on the estimated clutter profile. For grasp planning, we present an improved and adaptive version of a recent domain-independent grasping method. The efficacy of the integrated system is demonstrated in simulation as well as in the real-world.
* Published at 2022 International Joint Conference on Neural Networks (IJCNN)
A generalized algorithm and framework for online 3-dimensional bin packing in an automated sorting center
Nov 01, 2021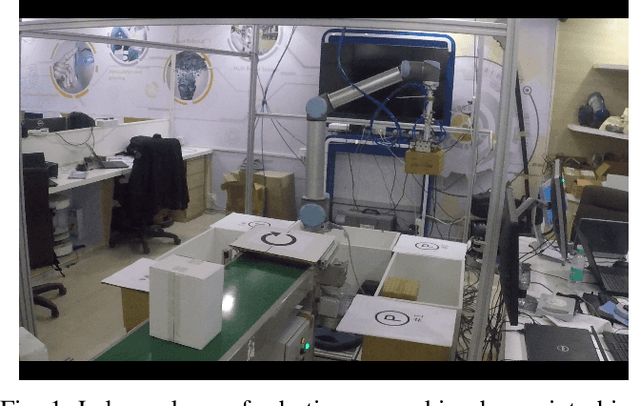
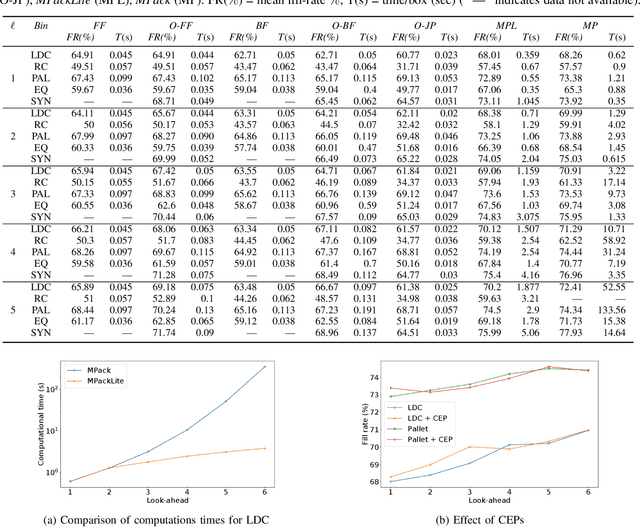
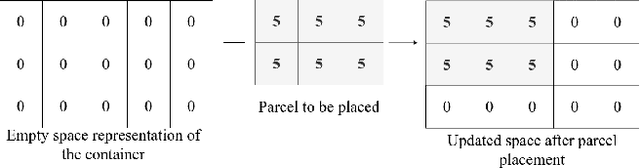
Online 3-dimensional bin packing problem (O3D-BPP) is getting renewed prominence due to the industrial automation brought by Industry 4.0. However, due to limited attention in the past and its challenging nature, a good approximate algorithm is in scarcity as compared to 1D or 2D problems. This paper considers real-time O$3$D-BPP of cuboidal boxes with partial information (look-ahead) in an automated robotic sorting center. We present two rolling-horizon mixed-integer linear programming (MILP) cum-heuristic based algorithms: MPack (for bench-marking) and MPackLite (for real-time deployment). Additionally, we present a framework OPack that adapts and improves the performance of BP heuristics by utilizing information in an online setting with a look-ahead. We then perform a comparative analysis of BP heuristics (with and without OPack), MPack, and MPackLite on synthetic and industry provided data with increasing look-ahead. MPackLite and the baseline heuristics perform within bounds of robot operations and thus, can be used in real-time.
Chitrakar: Robotic System for Drawing Jordan Curve of Facial Portrait
Nov 21, 2020
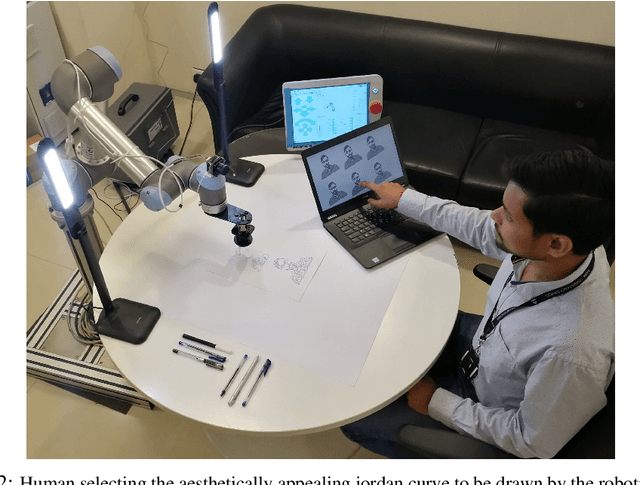
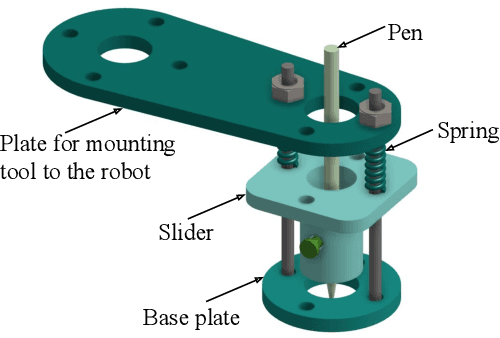
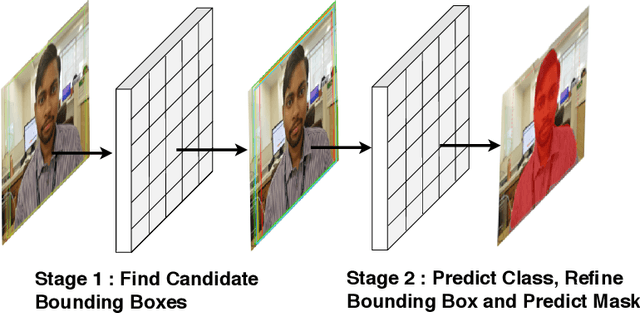
This paper presents a robotic system (\textit{Chitrakar}) which autonomously converts any image of a human face to a recognizable non-self-intersecting loop (Jordan Curve) and draws it on any planar surface. The image is processed using Mask R-CNN for instance segmentation, Laplacian of Gaussian (LoG) for feature enhancement and intensity-based probabilistic stippling for the image to points conversion. These points are treated as a destination for a travelling salesman and are connected with an optimal path which is calculated heuristically by minimizing the total distance to be travelled. This path is converted to a Jordan Curve in feasible time by removing intersections using a combination of image processing, 2-opt, and Bresenham's Algorithm. The robotic system generates $n$ instances of each image for human aesthetic judgement, out of which the most appealing instance is selected for the final drawing. The drawing is executed carefully by the robot's arm using trapezoidal velocity profiles for jerk-free and fast motion. The drawing, with a decent resolution, can be completed in less than 30 minutes which is impossible to do by hand. This work demonstrates the use of robotics to augment humans in executing difficult craft-work instead of replacing them altogether.
A Generalized Reinforcement Learning Algorithm for Online 3D Bin-Packing
Jul 01, 2020
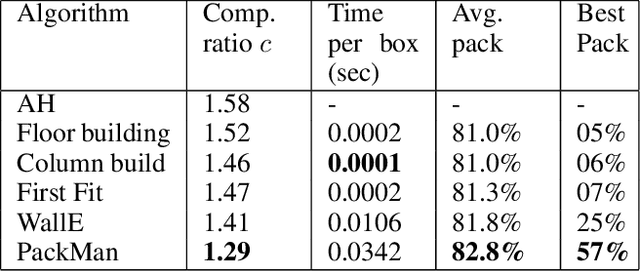
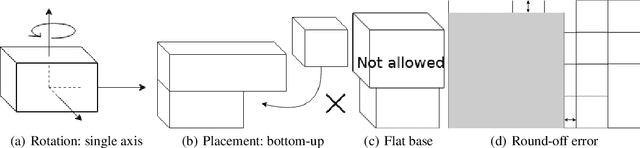
We propose a Deep Reinforcement Learning (Deep RL) algorithm for solving the online 3D bin packing problem for an arbitrary number of bins and any bin size. The focus is on producing decisions that can be physically implemented by a robotic loading arm, a laboratory prototype used for testing the concept. The problem considered in this paper is novel in two ways. First, unlike the traditional 3D bin packing problem, we assume that the entire set of objects to be packed is not known a priori. Instead, a fixed number of upcoming objects is visible to the loading system, and they must be loaded in the order of arrival. Second, the goal is not to move objects from one point to another via a feasible path, but to find a location and orientation for each object that maximises the overall packing efficiency of the bin(s). Finally, the learnt model is designed to work with problem instances of arbitrary size without retraining. Simulation results show that the RL-based method outperforms state-of-the-art online bin packing heuristics in terms of empirical competitive ratio and volume efficiency.
Managing a Fleet of Autonomous Mobile Robots using Cloud Robotics Platform
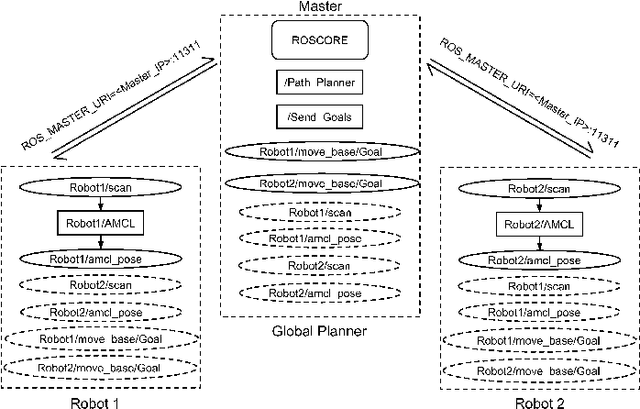
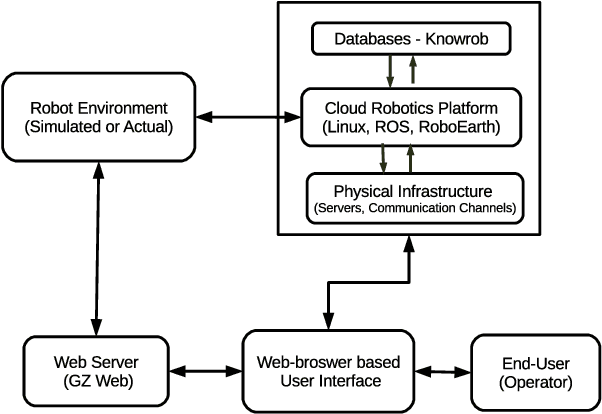
Jun 27, 2017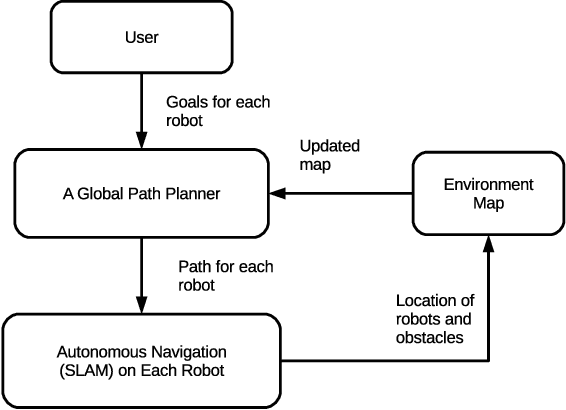

In this paper, we provide details of implementing a system for managing a fleet of autonomous mobile robots (AMR) operating in a factory or a warehouse premise. While the robots are themselves autonomous in its motion and obstacle avoidance capability, the target destination for each robot is provided by a global planner. The global planner and the ground vehicles (robots) constitute a multi agent system (MAS) which communicate with each other over a wireless network. Three different approaches are explored for implementation. The first two approaches make use of the distributed computing based Networked Robotics architecture and communication framework of Robot Operating System (ROS) itself while the third approach uses Rapyuta Cloud Robotics framework for this implementation. The comparative performance of these approaches are analyzed through simulation as well as real world experiment with actual robots. These analyses provide an in-depth understanding of the inner working of the Cloud Robotics Platform in contrast to the usual ROS framework. The insight gained through this exercise will be valuable for students as well as practicing engineers interested in implementing similar systems else where. In the process, we also identify few critical limitations of the current Rapyuta platform and provide suggestions to overcome them.