 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChitrakar: Robotic System for Drawing Jordan Curve of Facial Portrait
Paper and Code
Nov 21, 2020
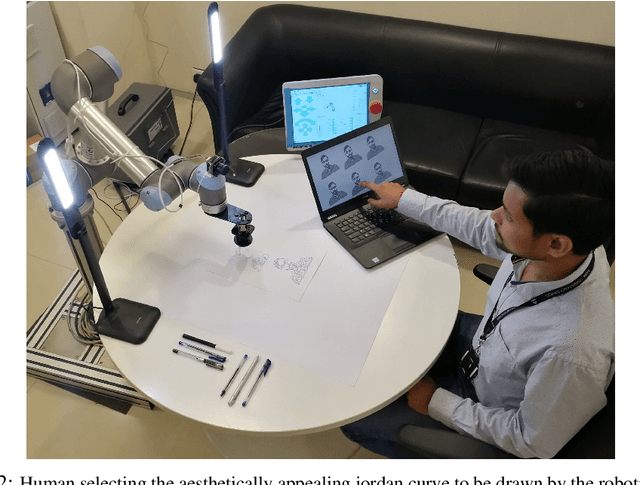
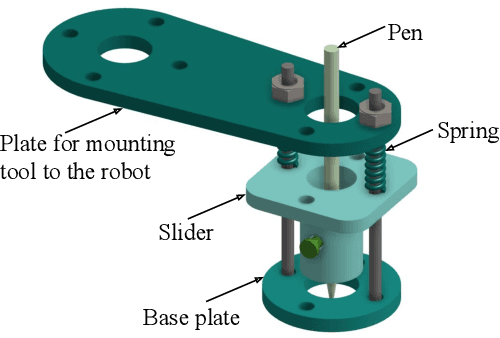
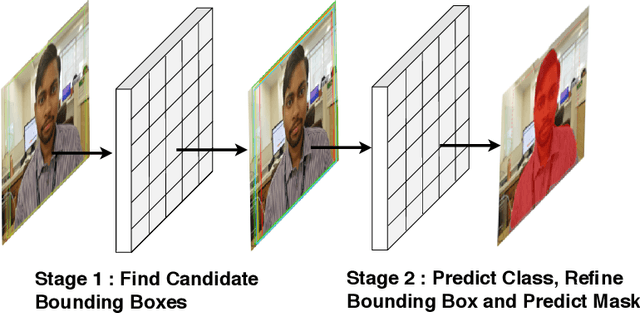
This paper presents a robotic system (\textit{Chitrakar}) which autonomously converts any image of a human face to a recognizable non-self-intersecting loop (Jordan Curve) and draws it on any planar surface. The image is processed using Mask R-CNN for instance segmentation, Laplacian of Gaussian (LoG) for feature enhancement and intensity-based probabilistic stippling for the image to points conversion. These points are treated as a destination for a travelling salesman and are connected with an optimal path which is calculated heuristically by minimizing the total distance to be travelled. This path is converted to a Jordan Curve in feasible time by removing intersections using a combination of image processing, 2-opt, and Bresenham's Algorithm. The robotic system generates $n$ instances of each image for human aesthetic judgement, out of which the most appealing instance is selected for the final drawing. The drawing is executed carefully by the robot's arm using trapezoidal velocity profiles for jerk-free and fast motion. The drawing, with a decent resolution, can be completed in less than 30 minutes which is impossible to do by hand. This work demonstrates the use of robotics to augment humans in executing difficult craft-work instead of replacing them altogether.