 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Ultrasound-Guided Femoral Artery Reconstruction of Anatomically-Representative Phantoms
Mar 09, 2025Femoral artery access is essential for numerous clinical procedures, including diagnostic angiography, therapeutic catheterization, and emergency interventions. Despite its critical role, successful vascular access remains challenging due to anatomical variability, overlying adipose tissue, and the need for precise ultrasound (US) guidance. Errors in needle placement can lead to severe complications, restricting the procedure to highly skilled clinicians in controlled hospital settings. While robotic systems have shown promise in addressing these challenges through autonomous scanning and vessel reconstruction, clinical translation remains limited due to reliance on simplified phantom models that fail to capture human anatomical complexity. In this work, we present a method for autonomous robotic US scanning of bifurcated femoral arteries, and validate it on five vascular phantoms created from real patient computed tomography (CT) data. Additionally, we introduce a video-based deep learning US segmentation network tailored for vascular imaging, enabling improved 3D arterial reconstruction. The proposed network achieves a Dice score of 89.21% and an Intersection over Union of 80.54% on a newly developed vascular dataset. The quality of the reconstructed artery centerline is evaluated against ground truth CT data, demonstrating an average L2 deviation of 0.91+/-0.70 mm, with an average Hausdorff distance of 4.36+/-1.11mm. This study is the first to validate an autonomous robotic system for US scanning of the femoral artery on a diverse set of patient-specific phantoms, introducing a more advanced framework for evaluating robotic performance in vascular imaging and intervention.
Coaching a Robotic Sonographer: Learning Robotic Ultrasound with Sparse Expert's Feedback
Sep 03, 2024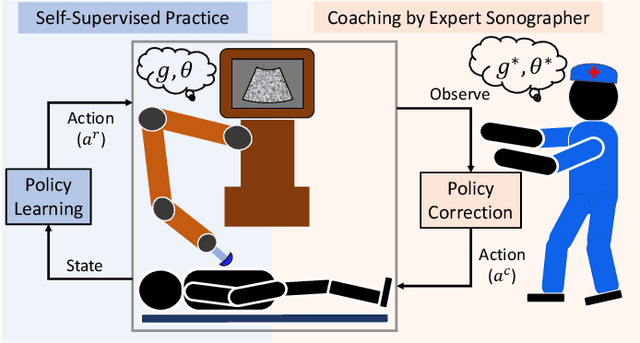
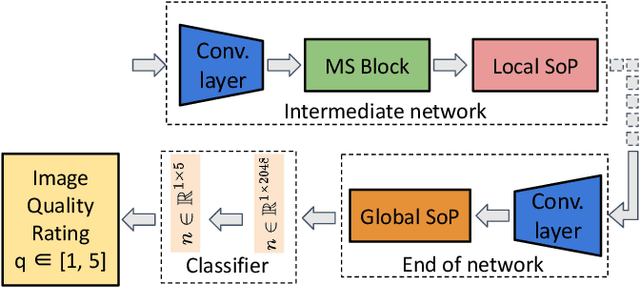
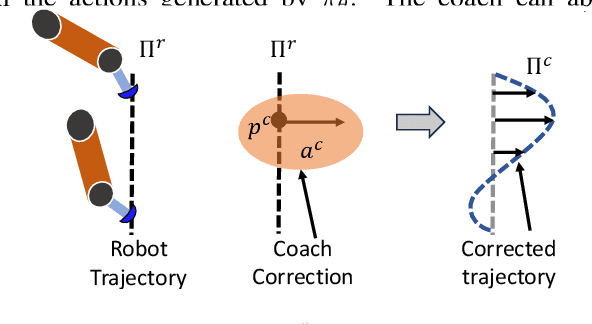
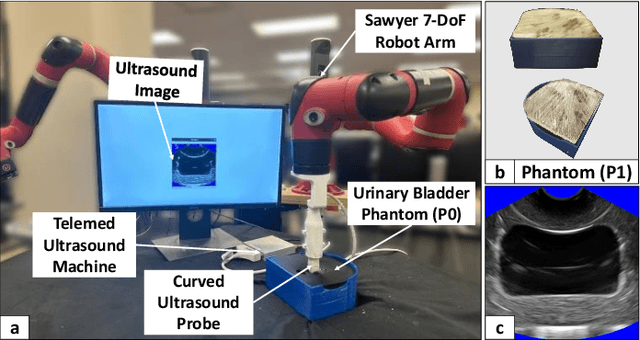
Ultrasound is widely employed for clinical intervention and diagnosis, due to its advantages of offering non-invasive, radiation-free, and real-time imaging. However, the accessibility of this dexterous procedure is limited due to the substantial training and expertise required of operators. The robotic ultrasound (RUS) offers a viable solution to address this limitation; nonetheless, achieving human-level proficiency remains challenging. Learning from demonstrations (LfD) methods have been explored in RUS, which learns the policy prior from a dataset of offline demonstrations to encode the mental model of the expert sonographer. However, active engagement of experts, i.e. Coaching, during the training of RUS has not been explored thus far. Coaching is known for enhancing efficiency and performance in human training. This paper proposes a coaching framework for RUS to amplify its performance. The framework combines DRL (self-supervised practice) with sparse expert's feedback through coaching. The DRL employs an off-policy Soft Actor-Critic (SAC) network, with a reward based on image quality rating. The coaching by experts is modeled as a Partially Observable Markov Decision Process (POMDP), which updates the policy parameters based on the correction by the expert. The validation study on phantoms showed that coaching increases the learning rate by $25\%$ and the number of high-quality image acquisition by $74.5\%$.
UltraGelBot: Autonomous Gel Dispenser for Robotic Ultrasound
Jun 28, 2024Telerobotic and Autonomous Robotic Ultrasound Systems (RUS) help alleviate the need for operator-dependability in free-hand ultrasound examinations. However, the state-of-the-art RUSs still rely on a human operator to apply the ultrasound gel. The lack of standardization in this process often leads to poor imaging of the scanned region. The reason for this has to do with air-gaps between the probe and the human body. In this paper, we developed a end-of-arm tool for RUS, referred to as UltraGelBot. This bot can autonomously detect and dispense the gel. It uses a deep learning model to detect the gel from images acquired using an on-board camera. A motorized mechanism is also developed, which will use this feedback and dispense the gel. Experiments on phantom revealed that UltraGelBot increases the acquired image quality by $18.6\%$ and reduces the procedure time by $37.2\%$.
Deep Kernel and Image Quality Estimators for Optimizing Robotic Ultrasound Controller using Bayesian Optimization
Oct 11, 2023



Ultrasound is a commonly used medical imaging modality that requires expert sonographers to manually maneuver the ultrasound probe based on the acquired image. Autonomous Robotic Ultrasound (A-RUS) is an appealing alternative to this manual procedure in order to reduce sonographers' workload. The key challenge to A-RUS is optimizing the ultrasound image quality for the region of interest across different patients. This requires knowledge of anatomy, recognition of error sources and precise probe position, orientation and pressure. Sample efficiency is important while optimizing these parameters associated with the robotized probe controller. Bayesian Optimization (BO), a sample-efficient optimization framework, has recently been applied to optimize the 2D motion of the probe. Nevertheless, further improvements are needed to improve the sample efficiency for high-dimensional control of the probe. We aim to overcome this problem by using a neural network to learn a low-dimensional kernel in BO, termed as Deep Kernel (DK). The neural network of DK is trained using probe and image data acquired during the procedure. The two image quality estimators are proposed that use a deep convolution neural network and provide real-time feedback to the BO. We validated our framework using these two feedback functions on three urinary bladder phantoms. We obtained over 50% increase in sample efficiency for 6D control of the robotized probe. Furthermore, our results indicate that this performance enhancement in BO is independent of the specific training dataset, demonstrating inter-patient adaptability.
RUSOpt: Robotic UltraSound Probe Normalization with Bayesian Optimization for In-plane and Out-plane Scanning
Oct 05, 2023The one of the significant challenges faced by autonomous robotic ultrasound systems is acquiring high-quality images across different patients. The proper orientation of the robotized probe plays a crucial role in governing the quality of ultrasound images. To address this challenge, we propose a sample-efficient method to automatically adjust the orientation of the ultrasound probe normal to the point of contact on the scanning surface, thereby improving the acoustic coupling of the probe and resulting image quality. Our method utilizes Bayesian Optimization (BO) based search on the scanning surface to efficiently search for the normalized probe orientation. We formulate a novel objective function for BO that leverages the contact force measurements and underlying mechanics to identify the normal. We further incorporate a regularization scheme in BO to handle the noisy objective function. The performance of the proposed strategy has been assessed through experiments on urinary bladder phantoms. These phantoms included planar, tilted, and rough surfaces, and were examined using both linear and convex probes with varying search space limits. Further, simulation-based studies have been carried out using 3D human mesh models. The results demonstrate that the mean ($\pm$SD) absolute angular error averaged over all phantoms and 3D models is $\boldsymbol{2.4\pm0.7^\circ}$ and $\boldsymbol{2.1\pm1.3^\circ}$, respectively.
Expert-Agnostic Ultrasound Image Quality Assessment using Deep Variational Clustering
Jul 06, 2023Ultrasound imaging is a commonly used modality for several diagnostic and therapeutic procedures. However, the diagnosis by ultrasound relies heavily on the quality of images assessed manually by sonographers, which diminishes the objectivity of the diagnosis and makes it operator-dependent. The supervised learning-based methods for automated quality assessment require manually annotated datasets, which are highly labour-intensive to acquire. These ultrasound images are low in quality and suffer from noisy annotations caused by inter-observer perceptual variations, which hampers learning efficiency. We propose an UnSupervised UltraSound image Quality assessment Network, US2QNet, that eliminates the burden and uncertainty of manual annotations. US2QNet uses the variational autoencoder embedded with the three modules, pre-processing, clustering and post-processing, to jointly enhance, extract, cluster and visualize the quality feature representation of ultrasound images. The pre-processing module uses filtering of images to point the network's attention towards salient quality features, rather than getting distracted by noise. Post-processing is proposed for visualizing the clusters of feature representations in 2D space. We validated the proposed framework for quality assessment of the urinary bladder ultrasound images. The proposed framework achieved 78% accuracy and superior performance to state-of-the-art clustering methods.
Robotic Sonographer: Autonomous Robotic Ultrasound using Domain Expertise in Bayesian Optimization
Jul 05, 2023Ultrasound is a vital imaging modality utilized for a variety of diagnostic and interventional procedures. However, an expert sonographer is required to make accurate maneuvers of the probe over the human body while making sense of the ultrasound images for diagnostic purposes. This procedure requires a substantial amount of training and up to a few years of experience. In this paper, we propose an autonomous robotic ultrasound system that uses Bayesian Optimization (BO) in combination with the domain expertise to predict and effectively scan the regions where diagnostic quality ultrasound images can be acquired. The quality map, which is a distribution of image quality in a scanning region, is estimated using Gaussian process in BO. This relies on a prior quality map modeled using expert's demonstration of the high-quality probing maneuvers. The ultrasound image quality feedback is provided to BO, which is estimated using a deep convolution neural network model. This model was previously trained on database of images labelled for diagnostic quality by expert radiologists. Experiments on three different urinary bladder phantoms validated that the proposed autonomous ultrasound system can acquire ultrasound images for diagnostic purposes with a probing position and force accuracy of 98.7% and 97.8%, respectively.
Slim U-Net: Efficient Anatomical Feature Preserving U-net Architecture for Ultrasound Image Segmentation
Feb 22, 2023We investigate the applicability of U-Net based models for segmenting Urinary Bladder (UB) in male pelvic view UltraSound (US) images. The segmentation of UB in the US image aids radiologists in diagnosing the UB. However, UB in US images has arbitrary shapes, indistinct boundaries and considerably large inter- and intra-subject variability, making segmentation a quite challenging task. Our study of the state-of-the-art (SOTA) segmentation network, U-Net, for the problem reveals that it often fails to capture the salient characteristics of UB due to the varying shape and scales of anatomy in the noisy US image. Also, U-net has an excessive number of trainable parameters, reporting poor computational efficiency during training. We propose a Slim U-Net to address the challenges of UB segmentation. Slim U-Net proposes to efficiently preserve the salient features of UB by reshaping the structure of U-Net using a less number of 2D convolution layers in the contracting path, in order to preserve and impose them on expanding path. To effectively distinguish the blurred boundaries, we propose a novel annotation methodology, which includes the background area of the image at the boundary of a marked region of interest (RoI), thereby steering the model's attention towards boundaries. In addition, we suggested a combination of loss functions for network training in the complex segmentation of UB. The experimental results demonstrate that Slim U-net is statistically superior to U-net for UB segmentation. The Slim U-net further decreases the number of trainable parameters and training time by 54% and 57.7%, respectively, compared to the standard U-Net, without compromising the segmentation accuracy.
Chitrakar: Robotic System for Drawing Jordan Curve of Facial Portrait
Nov 21, 2020
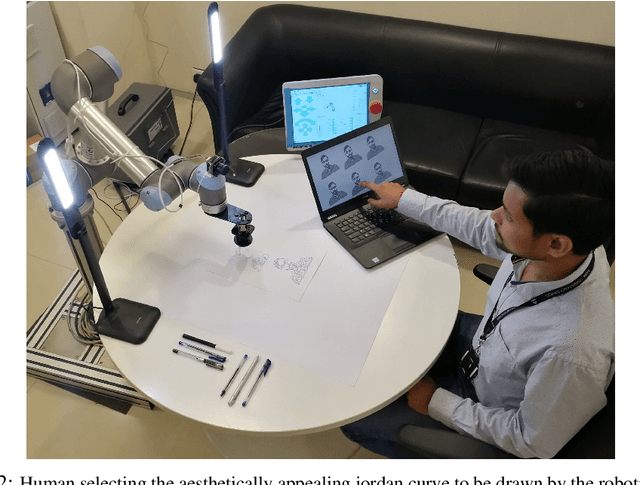
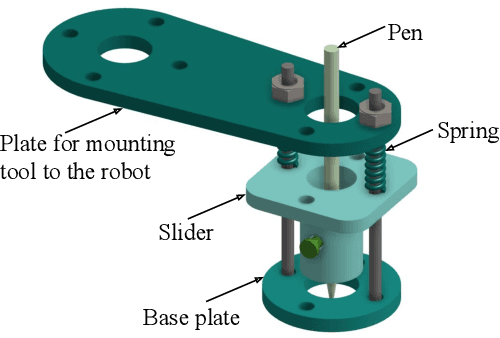
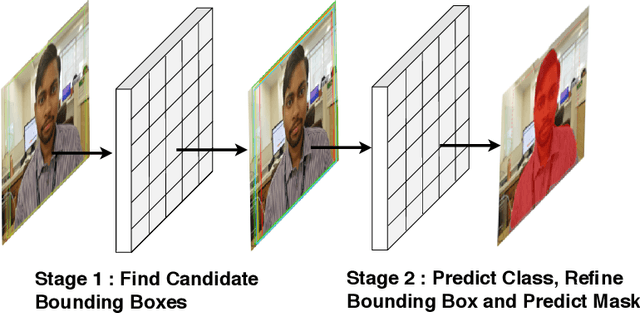
This paper presents a robotic system (\textit{Chitrakar}) which autonomously converts any image of a human face to a recognizable non-self-intersecting loop (Jordan Curve) and draws it on any planar surface. The image is processed using Mask R-CNN for instance segmentation, Laplacian of Gaussian (LoG) for feature enhancement and intensity-based probabilistic stippling for the image to points conversion. These points are treated as a destination for a travelling salesman and are connected with an optimal path which is calculated heuristically by minimizing the total distance to be travelled. This path is converted to a Jordan Curve in feasible time by removing intersections using a combination of image processing, 2-opt, and Bresenham's Algorithm. The robotic system generates $n$ instances of each image for human aesthetic judgement, out of which the most appealing instance is selected for the final drawing. The drawing is executed carefully by the robot's arm using trapezoidal velocity profiles for jerk-free and fast motion. The drawing, with a decent resolution, can be completed in less than 30 minutes which is impossible to do by hand. This work demonstrates the use of robotics to augment humans in executing difficult craft-work instead of replacing them altogether.