 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoaching a Robotic Sonographer: Learning Robotic Ultrasound with Sparse Expert's Feedback
Paper and Code
Sep 03, 2024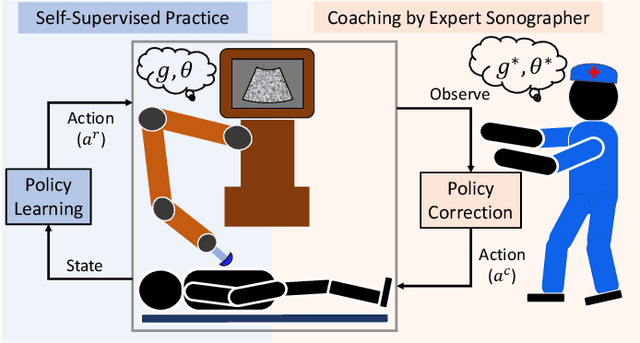
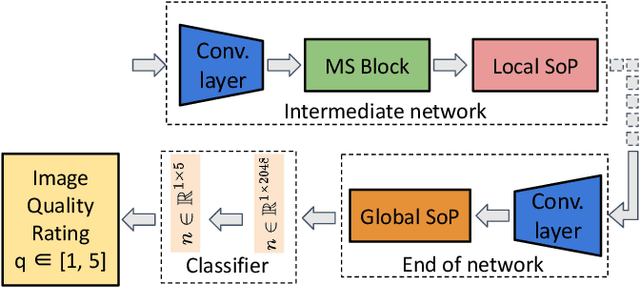
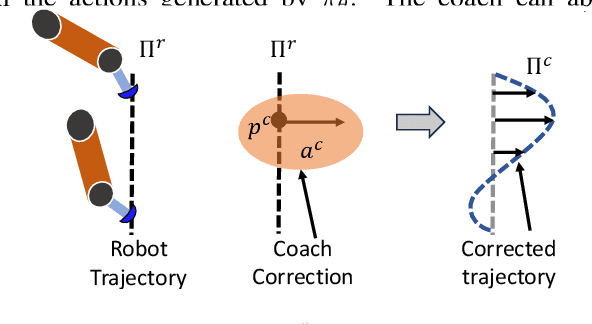
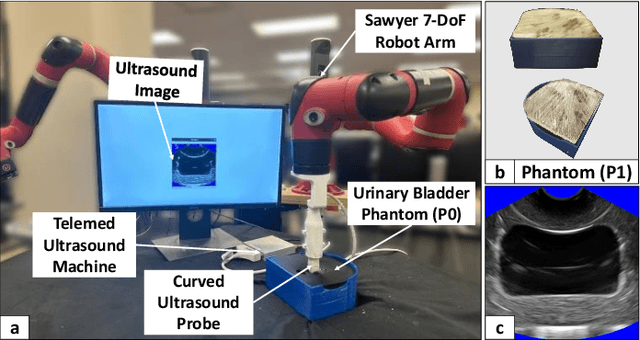
Ultrasound is widely employed for clinical intervention and diagnosis, due to its advantages of offering non-invasive, radiation-free, and real-time imaging. However, the accessibility of this dexterous procedure is limited due to the substantial training and expertise required of operators. The robotic ultrasound (RUS) offers a viable solution to address this limitation; nonetheless, achieving human-level proficiency remains challenging. Learning from demonstrations (LfD) methods have been explored in RUS, which learns the policy prior from a dataset of offline demonstrations to encode the mental model of the expert sonographer. However, active engagement of experts, i.e. Coaching, during the training of RUS has not been explored thus far. Coaching is known for enhancing efficiency and performance in human training. This paper proposes a coaching framework for RUS to amplify its performance. The framework combines DRL (self-supervised practice) with sparse expert's feedback through coaching. The DRL employs an off-policy Soft Actor-Critic (SAC) network, with a reward based on image quality rating. The coaching by experts is modeled as a Partially Observable Markov Decision Process (POMDP), which updates the policy parameters based on the correction by the expert. The validation study on phantoms showed that coaching increases the learning rate by $25\%$ and the number of high-quality image acquisition by $74.5\%$.