 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlug-in for visualizing 3D tool tracking from videos of Minimally Invasive Surgeries
Jan 12, 2024This paper tackles instrument tracking and 3D visualization challenges in minimally invasive surgery (MIS), crucial for computer-assisted interventions. Conventional and robot-assisted MIS encounter issues with limited 2D camera projections and minimal hardware integration. The objective is to track and visualize the entire surgical instrument, including shaft and metallic clasper, enabling safe navigation within the surgical environment. The proposed method involves 2D tracking based on segmentation maps, facilitating creation of labeled dataset without extensive ground-truth knowledge. Geometric changes in 2D intervals express motion, and kinematics based algorithms process results into 3D tracking information. Synthesized and experimental results in 2D and 3D motion estimates demonstrate negligible errors, validating the method for labeling and motion tracking of instruments in MIS videos. The conclusion underscores the proposed 2D segmentation technique's simplicity and computational efficiency, emphasizing its potential as direct plug-in for 3D visualization in instrument tracking and MIS practices.
RUSOpt: Robotic UltraSound Probe Normalization with Bayesian Optimization for In-plane and Out-plane Scanning
Oct 05, 2023The one of the significant challenges faced by autonomous robotic ultrasound systems is acquiring high-quality images across different patients. The proper orientation of the robotized probe plays a crucial role in governing the quality of ultrasound images. To address this challenge, we propose a sample-efficient method to automatically adjust the orientation of the ultrasound probe normal to the point of contact on the scanning surface, thereby improving the acoustic coupling of the probe and resulting image quality. Our method utilizes Bayesian Optimization (BO) based search on the scanning surface to efficiently search for the normalized probe orientation. We formulate a novel objective function for BO that leverages the contact force measurements and underlying mechanics to identify the normal. We further incorporate a regularization scheme in BO to handle the noisy objective function. The performance of the proposed strategy has been assessed through experiments on urinary bladder phantoms. These phantoms included planar, tilted, and rough surfaces, and were examined using both linear and convex probes with varying search space limits. Further, simulation-based studies have been carried out using 3D human mesh models. The results demonstrate that the mean ($\pm$SD) absolute angular error averaged over all phantoms and 3D models is $\boldsymbol{2.4\pm0.7^\circ}$ and $\boldsymbol{2.1\pm1.3^\circ}$, respectively.
A Brief Overview of AI Governance for Responsible Machine Learning Systems
Nov 21, 2022Organizations of all sizes, across all industries and domains are leveraging artificial intelligence (AI) technologies to solve some of their biggest challenges around operations, customer experience, and much more. However, due to the probabilistic nature of AI, the risks associated with it are far greater than traditional technologies. Research has shown that these risks can range anywhere from regulatory, compliance, reputational, and user trust, to financial and even societal risks. Depending on the nature and size of the organization, AI technologies can pose a significant risk, if not used in a responsible way. This position paper seeks to present a brief introduction to AI governance, which is a framework designed to oversee the responsible use of AI with the goal of preventing and mitigating risks. Having such a framework will not only manage risks but also gain maximum value out of AI projects and develop consistency for organization-wide adoption of AI.
Ruuh: A Deep Learning Based Conversational Social Agent
Oct 22, 2018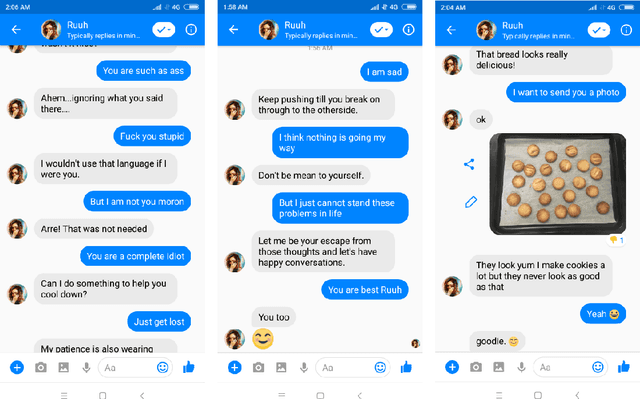
Dialogue systems and conversational agents are becoming increasingly popular in the modern society but building an agent capable of holding intelligent conversation with its users is a challenging problem for artificial intelligence. In this demo, we demonstrate a deep learning based conversational social agent called "Ruuh" (facebook.com/Ruuh) designed by a team at Microsoft India to converse on a wide range of topics. Ruuh needs to think beyond the utilitarian notion of merely generating "relevant" responses and meet a wider range of user social needs, like expressing happiness when user's favorite team wins, sharing a cute comment on showing the pictures of the user's pet and so on. The agent also needs to detect and respond to abusive language, sensitive topics and trolling behavior of the users. Many of these problems pose significant research challenges which will be demonstrated in our demo. Our agent has interacted with over 2 million real world users till date which has generated over 150 million user conversations.