 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstantaneous Planning, Control and Safety for Navigation in Unknown Underwater Spaces
Apr 07, 2026Navigating autonomous underwater vehicles (AUVs) in unknown environments is significantly challenging due to poor visibility, weak signal transmission, and dynamic water currents. These factors pose challenges in accurate global localization, reliable communication, and obstacle avoidance. Local sensing provides critical real time environmental data to enable online decision making. However, the inherent noise in underwater sensor measurements introduces uncertainty, complicating planning and control. To address these challenges, we propose an integrated planning and control framework that leverages real time sensor data to dynamically induce closed loop AUV trajectories, ensuring robust obstacle avoidance and enhanced maneuverability in tight spaces. By planning motion based on pre designed feedback controllers, the approach reduces the computational complexity needed for carrying out online optimizations and enhances operational safety in complex underwater spaces. The proposed method is validated through ROS Gazebo simulations on the RexRov AUV, demonstrating its efficacy. Its performance is evaluated by comparison against PID based tracking methods, and quantifying localization errors in dead reckoning as the AUV transitions into the target communication range.
A Survey on Sensor-based Planning and Control for Unmanned Underwater Vehicles
Apr 06, 2026This survey examines recent sensor-based planning and control methods for Unmanned Underwater Vehicles (UUVs). In complex, uncertain underwater environments, UUVs require advanced planning and control strategies for effective navigation. These vehicles face significant challenges including drifting and noisy sensor measurements, absence of Global Navigation Satellite System (GNSS) signals, and low-bandwidth, high-latency underwater acoustic communications. The focus is on reactive local planning layers that adapt to real-time sensor inputs such as SONAR and Inertial Measurement Units (IMU) to improve localization accuracy and autonomy in dynamic ocean conditions, enabling dynamic obstacle avoidance and on-the-fly re-planning. The survey categorizes the existing literature into decoupled and coupled architectures for sensor-based planning and control. The decoupled architecture sequentially addresses planning and control stages, whereas coupled architectures offer tighter feedback loops for more immediate responsiveness. A comparative analysis of coupled planning and control methods reveals that while PID controllers are simple, they lack predictive capability for complex maneuvers. Model Predictive Control (MPC) offers superior path optimization but can be computationally intensive, and invariant-set controllers provide strong safety guarantees at the potential cost of agility in confined environments. Key contributions include a taxonomy of architectures combining planning and control, a focus on adaptive local planning, and an analysis of controller roles in integrated planning frameworks for autonomous navigation of UUVs.
Self-navigation in crowds: An invariant set-based approach
Jan 17, 2024Self-navigation in non-coordinating crowded environments is formidably challenging within multi-agent systems consisting of non-holonomic robots operating through local sensing. Our primary objective is the development of a novel, rapid, sensor-driven, self-navigation controller that directly computes control commands to enable safe maneuvering while coexisting with other agents. We propose an input-constrained feedback controller meticulously crafted for non-holonomic mobile robots and the characterization of associated invariant sets. The invariant sets are the key to maintaining stability and safety amidst the non-cooperating agents. We then propose a planning strategy that strategically guides the generation of invariant sets toward the agent's intended target. This enables the agents to directly compute theoretically safe control inputs without explicitly requiring pre-planned paths/trajectories to reliably navigate through crowded multi-agent environments. The practicality of our technique is demonstrated through hardware experiments, and the ability to parallelize computations to shorten computational durations for synthesizing safe control commands. The proposed approach finds potential applications in crowded multi-agent scenarios that require rapid control computations based on perceived safety bounds during run-time.
Plug-in for visualizing 3D tool tracking from videos of Minimally Invasive Surgeries
Jan 12, 2024This paper tackles instrument tracking and 3D visualization challenges in minimally invasive surgery (MIS), crucial for computer-assisted interventions. Conventional and robot-assisted MIS encounter issues with limited 2D camera projections and minimal hardware integration. The objective is to track and visualize the entire surgical instrument, including shaft and metallic clasper, enabling safe navigation within the surgical environment. The proposed method involves 2D tracking based on segmentation maps, facilitating creation of labeled dataset without extensive ground-truth knowledge. Geometric changes in 2D intervals express motion, and kinematics based algorithms process results into 3D tracking information. Synthesized and experimental results in 2D and 3D motion estimates demonstrate negligible errors, validating the method for labeling and motion tracking of instruments in MIS videos. The conclusion underscores the proposed 2D segmentation technique's simplicity and computational efficiency, emphasizing its potential as direct plug-in for 3D visualization in instrument tracking and MIS practices.
Balancing Priorities in Patrolling with Rabbit Walks
Dec 27, 2023In an environment with certain locations of higher priority, it is required to patrol these locations as frequently as possible due to their importance. However, the Non-Priority locations are often neglected during the task. It is necessary to balance the patrols on both kinds of sites to avoid breaches in security. We present a distributed online algorithm that assigns the routes to agents that ensures a finite time visit to the Non-Priority locations along with Priority Patrolling. The proposed algorithm generates offline patrol routes (Rabbit Walks) with three segments (Hops) to explore non-priority locations. The generated number of offline walks depends exponentially on a parameter introduced in the proposed algorithm, thereby facilitating the scalable implementation based on the onboard resources available on each patrolling robot. A systematic performance evaluation through simulations and experimental results validates the proportionately balanced visits and suggests the proposed algorithm's versatile applicability in the implementation of deterministic and non-deterministic scenarios.
Swarm Synergy: A Silent Way of Forming Community
Nov 29, 2023In this paper, we introduce a novel swarm application, swarm synergy, where robots in a swarm intend to form communities. Each robot is considered to make independent decisions without any communication capability (silent agent). The proposed algorithm is based on parameters local to individual robots. Engaging scenarios are studied where the silent robots form communities without the preset conditions on the number of communities, community size, goal location of each community, and specific members in the community. Our approach allows silent robots to achieve this self-organized swarm behavior using only sensory inputs from the environment. The algorithm facilitates the formation of multiple swarm communities at arbitrary locations with unspecified goal locations. We further infer the behavior of swarm synergy to ensure the anonymity/untraceability of both robots and communities. The robots intend to form a community by sensing the neighbors, creating synergy in a bounded environment. The time to achieve synergy depends on the environment boundary and the onboard sensor's field of view. Compared to the state-of-art with similar objectives, the proposed communication-free swarm synergy shows comparative time to synergize with untraceability features.
Wobble control of a pendulum actuated spherical robot
Jan 16, 2023



Spherical robots can conduct surveillance in hostile, cluttered environments without being damaged, as their protective shell can safely house sensors such as cameras. However, lateral oscillations, also known as wobble, occur when these sphere-shaped robots operate at low speeds, leading to shaky camera feedback. These oscillations in a pendulum-actuated spherical robot are caused by the coupling between the forward and steering motions due to nonholonomic constraints. Designing a controller to limit wobbling in these robots is challenging due to their underactuated nature. We propose a model-based controller to navigate a pendulum-actuated spherical robot using wobble-free turning maneuvers consisting of circular arcs and straight lines. The model is developed using Lagrange-D'Alembert equations and accounts for the coupled forward and steering motions. The model is further analyzed to derive expressions for radius of curvature, precession rate, wobble amplitude, and wobble frequency during circular motions. Finally, we design an input-output feedback linearization-based controller to control the robot's heading direction and wobble. Overall, the proposed controller enables a teleoperator to command a specific forward velocity and pendulum angle as per the desired turning radius while limiting the robot's lateral oscillations to enhance the quality of camera feedback.
Pendulum Actuated Spherical Robot: Dynamic Modeling & Analysis for Wobble & Precession
Jan 14, 2023



A spherical robot has many practical advantages as the entire electronics are protected within a hull and can be carried easily by any Unmanned Aerial Vehicle (UAV). However, its use is limited due to finding mounts for sensors. Pendulum actuated spherical robot provides space for mounting sensors at the yoke. We study the non-linear dynamics of a pendulum-actuated spherical robot to analyze the dynamics of internal assembly (yoke) for mounting sensors. For such robots, we provide a coupled dynamic model that takes care of the relationship between forward and sideways motion. We further demonstrate the effects of wobbling and precession captured by our model when the bot is controlled to execute a turning maneuver while moving with a moderate forward velocity, a practical situation encountered by spherical robots moving in an indoor setting. A simulation setup based on the developed model provides visualization of the spherical robot motion.
3D Sensing of a Moving Object with a Nodding 2D LIDAR and Reconfigurable Mirrors
Dec 27, 2019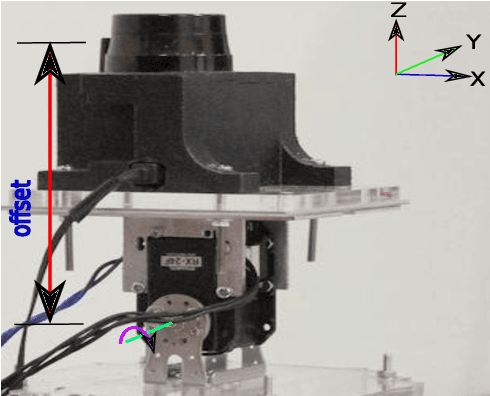
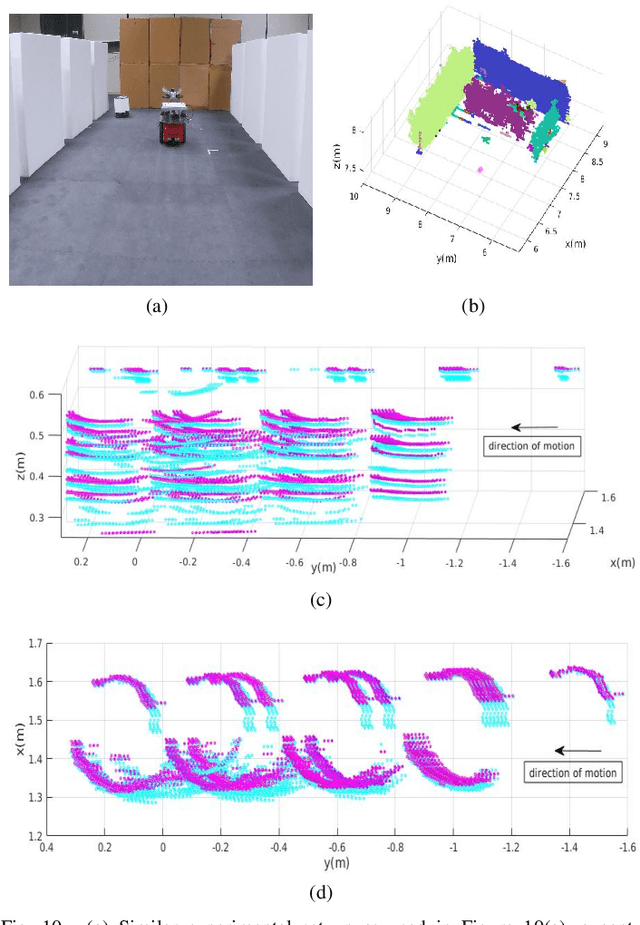
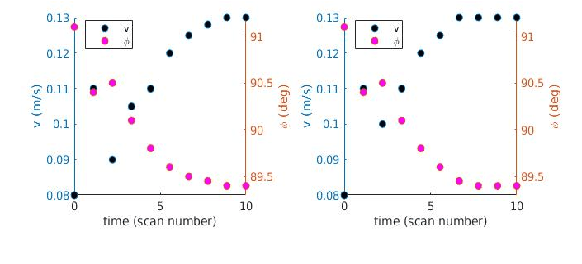
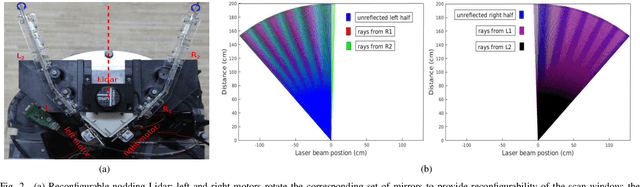
Perception in 3D has become standard practice for a large part of robotics applications. High quality 3D perception is costly. Our previous work on a nodding 2D Lidar provides high quality 3D depth information with low cost, but the sparse data generated by this sensor poses challenges in understanding the characteristics of moving objects within an uncertain environment. This paper proposes a novel design of the nodding Lidar but provides dynamic reconfigurability in terms of limiting the field of view of the sensor using a set of optical mirrors. It not only provides denser scans, but it also achieves a three times higher scan update rate. Additionally, we propose a novel calibration mechanism for this sensor and prove its effectiveness for dynamic object detection and tracking.
Reconfigurable formations of quadrotors on Lissajous curves for surveillance applications
Dec 12, 2018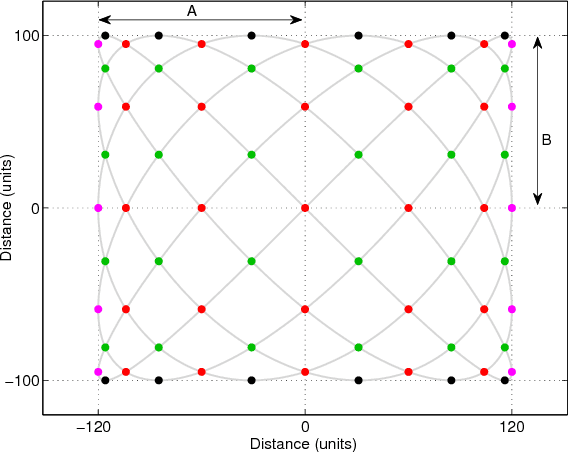
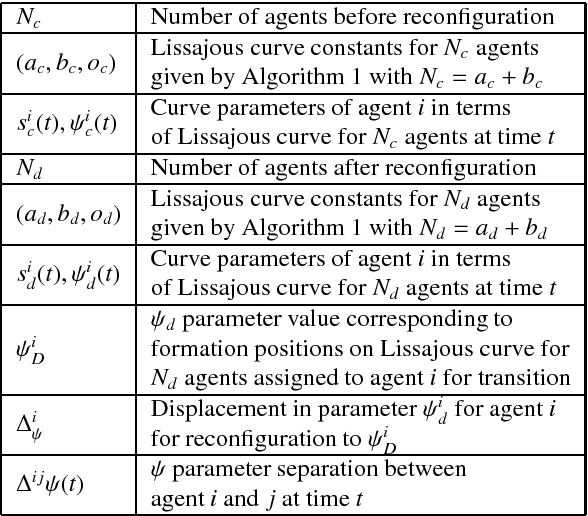
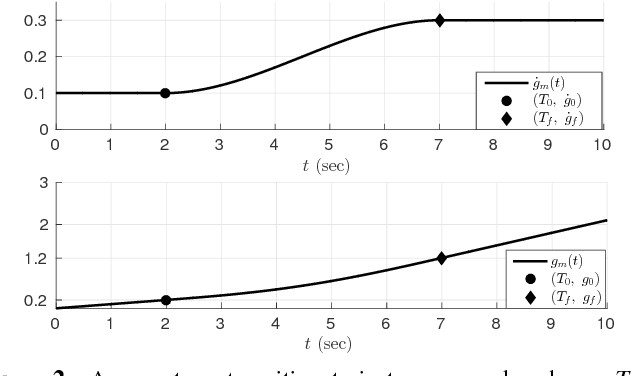
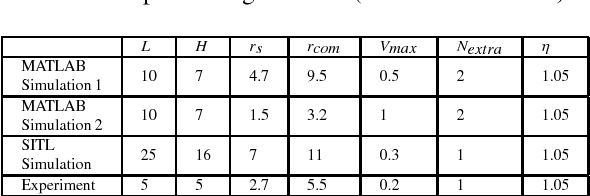
This paper proposes trajectory planning strategies for online reconfiguration of a multi-agent formation on a Lissajous curve. In our earlier work, a multi-agent formation with constant parametric speed was proposed in order to address multiple objectives such as repeated collision-free surveillance and guaranteed sensor coverage of the area with ability for rogue target detection and trapping. This work addresses the issue of formation reconfiguration within this context. In particular, smooth parametric trajectories are designed for the purpose using calculus of variations. These trajectories have been employed in conjunction with a simple local cooperation scheme so as to achieve collision-free reconfiguration between different Lissajous curves. A detailed theoretical analysis of the proposed scheme is provided. These surveillance and reconfiguration strategies have also been validated through simulations in MATLAB\reg for agents performing parametric motion along the curves, and by Software-In-The-Loop simulation for quadrotors. In addition, they are validated experimentally with a team of quadrotors flying in a motion capture environment.