Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHilbert's Space-filling Curve for Regions with Holes
Paper and Code
Sep 09, 2017
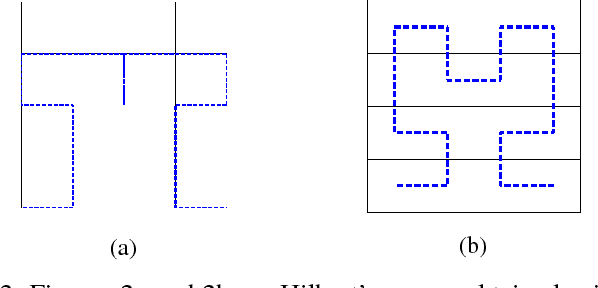
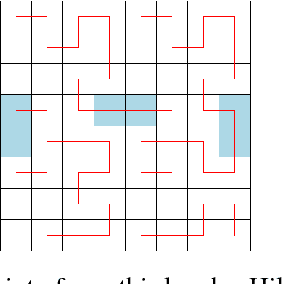

The paper presents a systematic strategy for implementing Hilbert's space filling curve for use in online exploration tasks and addresses its application in scenarios wherein the space to be searched obstacles (or holes) whose locations are not known a priori. Using the self-similarity and locality preserving properties of Hilbert's space filling curve, a set of evasive maneuvers are prescribed and characterized for online implementation. Application of these maneuvers in the case of non-uniform coverage of spaces and for obstacles of varying sizes is also presented. The results are validated with representative simulations demonstrating the deployment of the approach.
* Accepted for presentation at the 56th IEEE Conference on Decision and
Control 2017
View paper on