 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning of Nonholonomic Cooperative Mobile Manipulators
Feb 08, 2025We propose a real-time implementable motion planning technique for cooperative object transportation by nonholonomic mobile manipulator robots (MMRs) in an environment with static and dynamic obstacles. The proposed motion planning technique works in two steps. A novel visibility vertices-based path planning algorithm computes a global piece-wise linear path between the start and the goal location in the presence of static obstacles offline. It defines the static obstacle free space around the path with a set of convex polygons for the online motion planner. We employ a Nonliner Model Predictive Control (NMPC) based online motion planning technique for nonholonomic MMRs that jointly plans for the mobile base and the manipulators arm. It efficiently utilizes the locomotion capability of the mobile base and the manipulation capability of the arm. The motion planner plans feasible motion for the MMRs and generates trajectory for object transportation considering the kinodynamic constraints and the static and dynamic obstacles. The efficiency of our approach is validated by numerical simulation and hardware experiments in varied environments.
Balancing Priorities in Patrolling with Rabbit Walks
Dec 27, 2023In an environment with certain locations of higher priority, it is required to patrol these locations as frequently as possible due to their importance. However, the Non-Priority locations are often neglected during the task. It is necessary to balance the patrols on both kinds of sites to avoid breaches in security. We present a distributed online algorithm that assigns the routes to agents that ensures a finite time visit to the Non-Priority locations along with Priority Patrolling. The proposed algorithm generates offline patrol routes (Rabbit Walks) with three segments (Hops) to explore non-priority locations. The generated number of offline walks depends exponentially on a parameter introduced in the proposed algorithm, thereby facilitating the scalable implementation based on the onboard resources available on each patrolling robot. A systematic performance evaluation through simulations and experimental results validates the proportionately balanced visits and suggests the proposed algorithm's versatile applicability in the implementation of deterministic and non-deterministic scenarios.
Autonomous Intersection Management for Non-Communicative Autonomous Vehicles
Nov 29, 2023This paper addresses the traffic management problem for autonomous vehicles at intersections without traffic signals. In the current system, a road junction has no traffic signals when the traffic volume is low to medium. Installing infrastructure at each unsignalled crossing to coordinate autonomous cars can be formidable. We propose a novel decentralized strategy where the vehicles use a harmony matrix to find the best possible combination of the cars to cross the intersection without any crashes. We formulate a maximal clique problem using harmony matrix that maximizes the intersection throughput. This algorithm does not require communication between the vehicles. We compared our work with state-of-the-art communicative strategies and widely used traditional and modern methods for intersection management. Through extensive simulation, we showed that our algorithm is comparable to state-of-the-art and outperforms traditional methods.
An Enhanced RRT based Algorithm for Dynamic Path Planning and Energy Management of a Mobile Robot
Oct 31, 2023Mobile robots often have limited battery life and need to recharge periodically. This paper presents an RRT- based path-planning algorithm that addresses battery power management. A path is generated continuously from the robot's current position to its recharging station. The robot decides if a recharge is needed based on the energy required to travel on that path and the robot's current power. RRT* is used to generate the first path, and then subsequent paths are made using information from previous trees. Finally, the presented algorithm was compared with Extended Rate Random Tree (ERRT) algorithm
Online Obstacle evasion with Space-Filling Curves
Aug 04, 2023The paper presents a strategy for robotic exploration problems using Space-Filling curves (SFC). The region of interest is first tessellated, and the tiles/cells are connected using some SFC. A robot follows the SFC to explore the entire area. However, there could be obstacles that block the systematic movement of the robot. We overcome this problem by providing an evading technique that avoids the blocked tiles while ensuring all the free ones are visited at least once. The proposed strategy is online, implying that prior knowledge of the obstacles is not mandatory. It works for all SFCs, but for the sake of demonstration, we use Hilbert curve. We present the completeness of the algorithm and discuss its desirable properties with examples. We also address the non-uniform coverage problem using our strategy.
Online Evasive Strategy for Aerial Survey using Sierpinski curve
Sep 03, 2022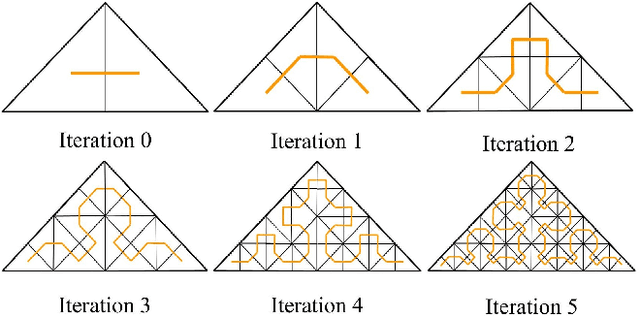
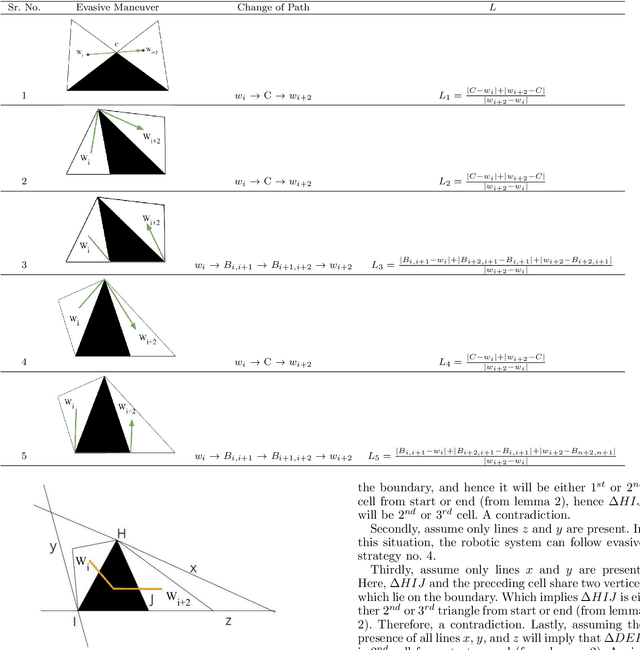
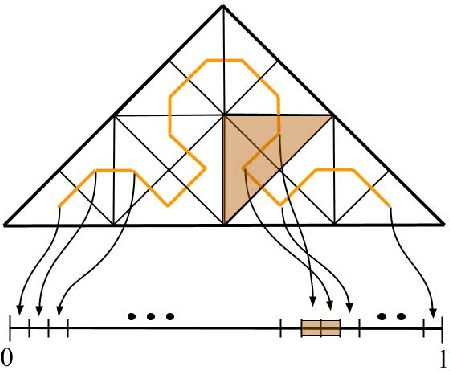
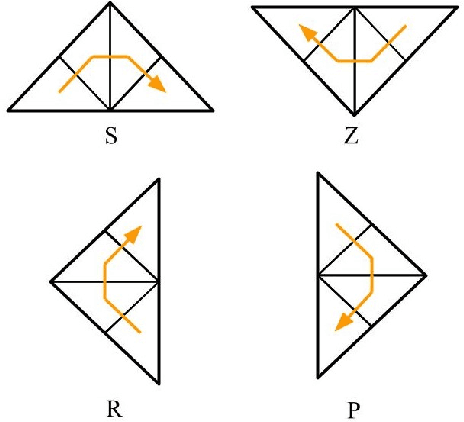
This paper deals with the aerial survey of a closed region using the Space-Filling curve, particularly Sierpinski curve. The specified region is triangulated, and the Sierpinski curve is used to explore each smaller triangular region. The entire region may have one or more obstacles. An algorithm is presented which suggests evasive manoeuvre (detour) if an obstacle is detected. The algorithm is online; that is, it does not require prior knowledge of the location of obstacles and can be applied while the robotic system is traversing the designated path. The fractal nature of the Sierpinski curve and simple geometric observations were used to formulate and validate the algorithm. The non-uniform coverage and multiple obstacle problems are also dealt with towards the end.
Reconfigurable formations of quadrotors on Lissajous curves for surveillance applications
Dec 12, 2018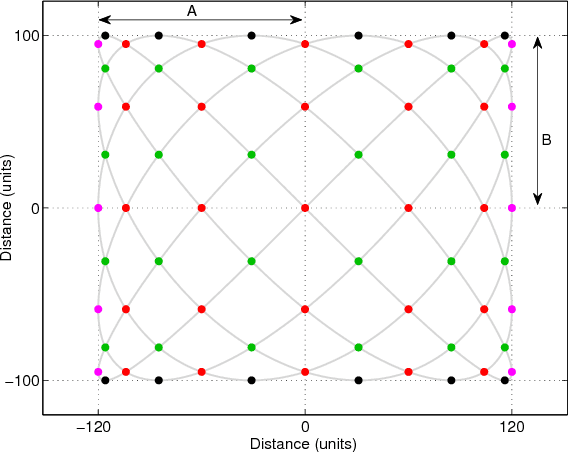
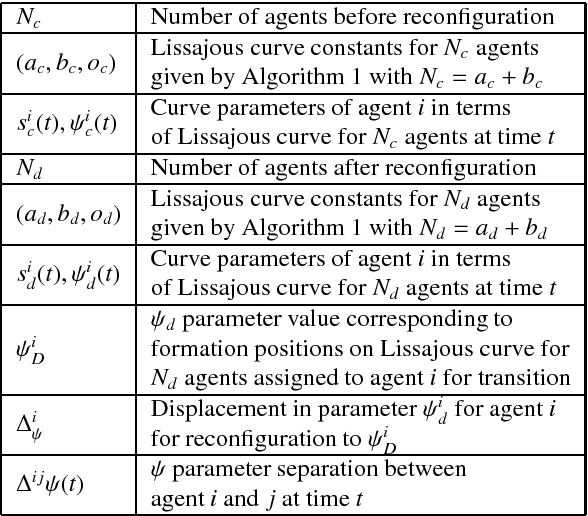
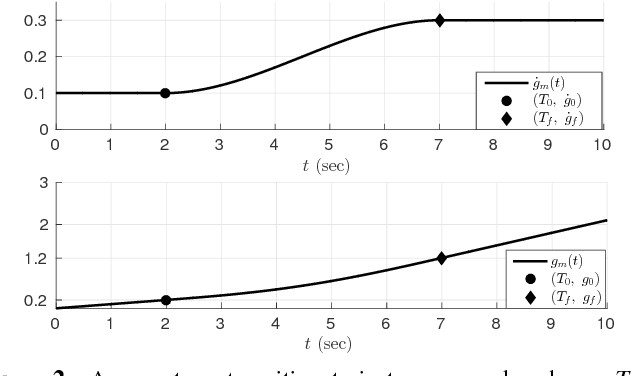
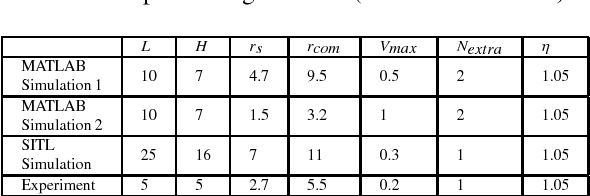
This paper proposes trajectory planning strategies for online reconfiguration of a multi-agent formation on a Lissajous curve. In our earlier work, a multi-agent formation with constant parametric speed was proposed in order to address multiple objectives such as repeated collision-free surveillance and guaranteed sensor coverage of the area with ability for rogue target detection and trapping. This work addresses the issue of formation reconfiguration within this context. In particular, smooth parametric trajectories are designed for the purpose using calculus of variations. These trajectories have been employed in conjunction with a simple local cooperation scheme so as to achieve collision-free reconfiguration between different Lissajous curves. A detailed theoretical analysis of the proposed scheme is provided. These surveillance and reconfiguration strategies have also been validated through simulations in MATLAB\reg for agents performing parametric motion along the curves, and by Software-In-The-Loop simulation for quadrotors. In addition, they are validated experimentally with a team of quadrotors flying in a motion capture environment.
Vector Field Guidance for Convoy Monitoring Using Elliptical Orbits
Sep 13, 2017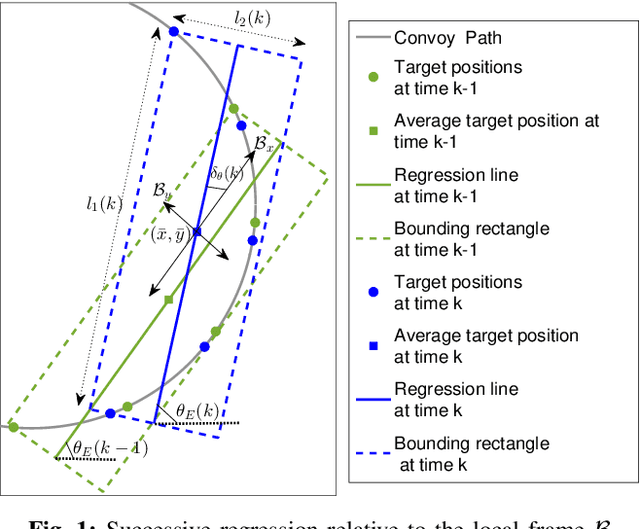
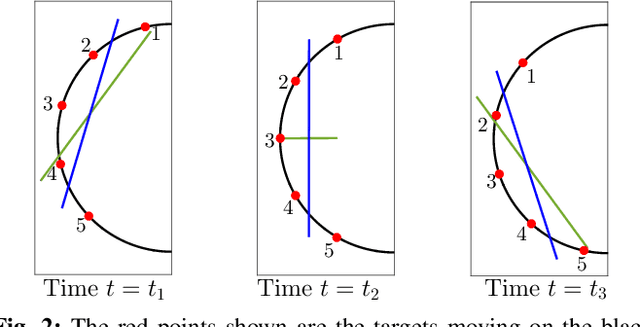
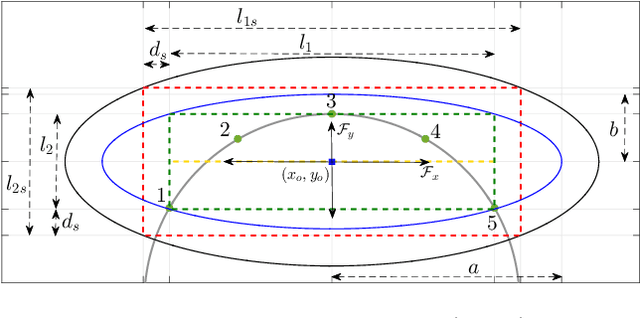
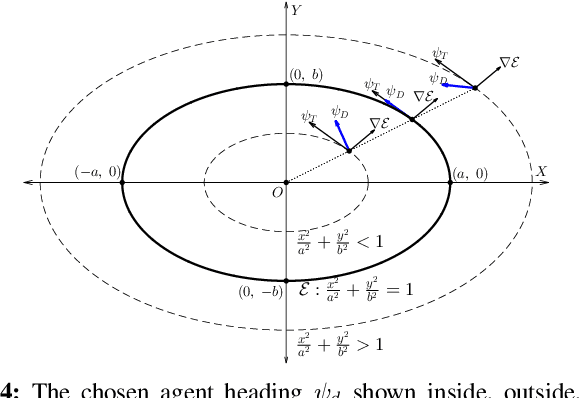
We propose a novel vector field based guidance scheme for tracking and surveillance of a convoy, moving along a possibly nonlinear trajectory on the ground, by an aerial agent. The scheme first computes a time varying ellipse that encompasses all the targets in the convoy using a simple regression based algorithm. It then ensures convergence of the agent to a trajectory that repeatedly traverses this moving ellipse. The scheme is analyzed using perturbation theory of nonlinear differential equations and supporting simulations are provided. Some related implementation issues are discussed and advantages of the scheme are highlighted.
Hilbert's Space-filling Curve for Regions with Holes
Sep 09, 2017
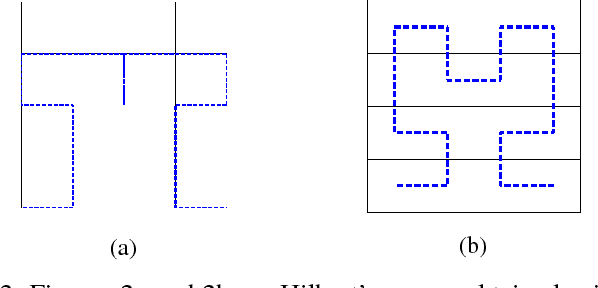
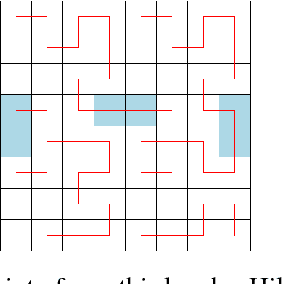

The paper presents a systematic strategy for implementing Hilbert's space filling curve for use in online exploration tasks and addresses its application in scenarios wherein the space to be searched obstacles (or holes) whose locations are not known a priori. Using the self-similarity and locality preserving properties of Hilbert's space filling curve, a set of evasive maneuvers are prescribed and characterized for online implementation. Application of these maneuvers in the case of non-uniform coverage of spaces and for obstacles of varying sizes is also presented. The results are validated with representative simulations demonstrating the deployment of the approach.