 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfigurable formations of quadrotors on Lissajous curves for surveillance applications
Dec 12, 2018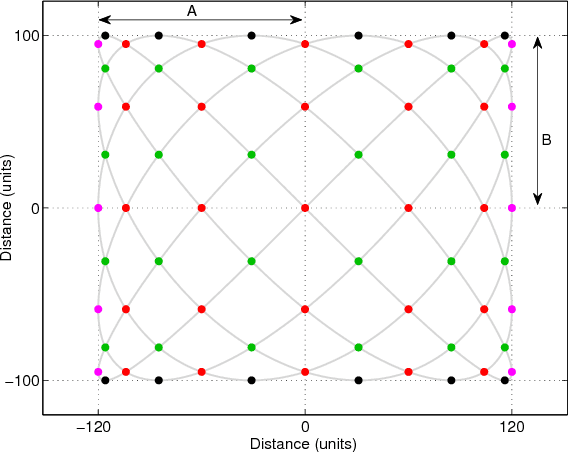
This paper proposes trajectory planning strategies for online reconfiguration of a multi-agent formation on a Lissajous curve. In our earlier work, a multi-agent formation with constant parametric speed was proposed in order to address multiple objectives such as repeated collision-free surveillance and guaranteed sensor coverage of the area with ability for rogue target detection and trapping. This work addresses the issue of formation reconfiguration within this context. In particular, smooth parametric trajectories are designed for the purpose using calculus of variations. These trajectories have been employed in conjunction with a simple local cooperation scheme so as to achieve collision-free reconfiguration between different Lissajous curves. A detailed theoretical analysis of the proposed scheme is provided. These surveillance and reconfiguration strategies have also been validated through simulations in MATLAB\reg for agents performing parametric motion along the curves, and by Software-In-The-Loop simulation for quadrotors. In addition, they are validated experimentally with a team of quadrotors flying in a motion capture environment.
Vector Field Guidance for Convoy Monitoring Using Elliptical Orbits
Sep 13, 2017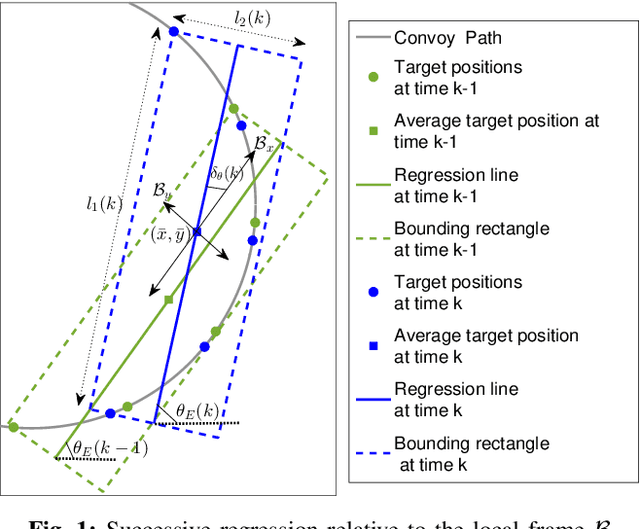
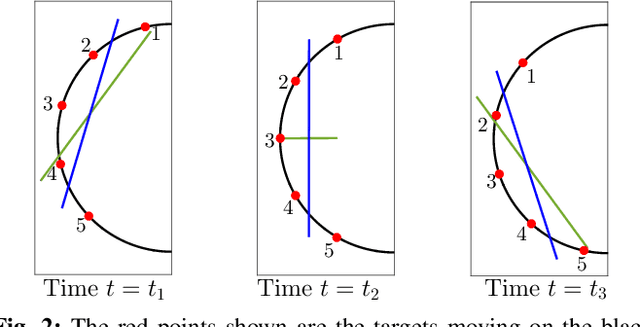
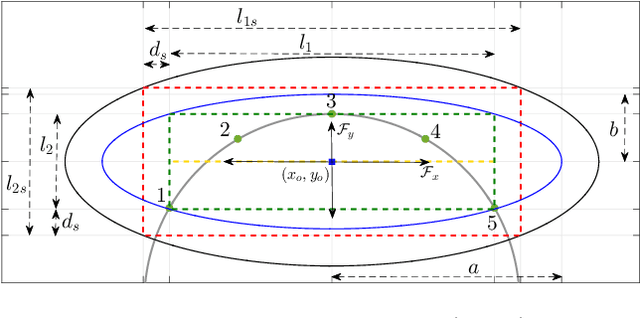
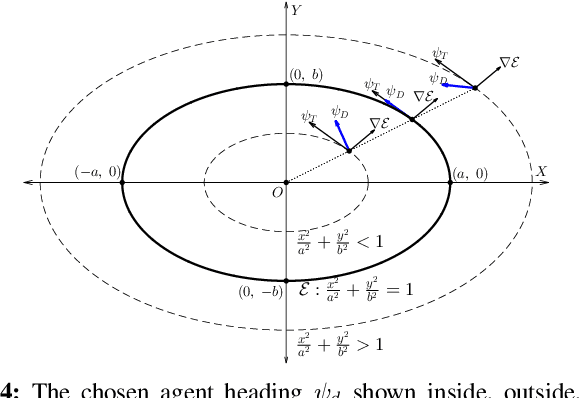
We propose a novel vector field based guidance scheme for tracking and surveillance of a convoy, moving along a possibly nonlinear trajectory on the ground, by an aerial agent. The scheme first computes a time varying ellipse that encompasses all the targets in the convoy using a simple regression based algorithm. It then ensures convergence of the agent to a trajectory that repeatedly traverses this moving ellipse. The scheme is analyzed using perturbation theory of nonlinear differential equations and supporting simulations are provided. Some related implementation issues are discussed and advantages of the scheme are highlighted.