 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManifold meta-learning for reduced-complexity neural system identification
Apr 16, 2025



System identification has greatly benefited from deep learning techniques, particularly for modeling complex, nonlinear dynamical systems with partially unknown physics where traditional approaches may not be feasible. However, deep learning models often require large datasets and significant computational resources at training and inference due to their high-dimensional parameterizations. To address this challenge, we propose a meta-learning framework that discovers a low-dimensional manifold within the parameter space of an over-parameterized neural network architecture. This manifold is learned from a meta-dataset of input-output sequences generated by a class of related dynamical systems, enabling efficient model training while preserving the network's expressive power for the considered system class. Unlike bilevel meta-learning approaches, our method employs an auxiliary neural network to map datasets directly onto the learned manifold, eliminating the need for costly second-order gradient computations during meta-training and reducing the number of first-order updates required in inference, which could be expensive for large models. We validate our approach on a family of Bouc-Wen oscillators, which is a well-studied nonlinear system identification benchmark. We demonstrate that we are able to learn accurate models even in small-data scenarios.
User-Preference Meets Pareto-Optimality: Multi-Objective Bayesian Optimization with Local Gradient Search
Feb 10, 2025Incorporating user preferences into multi-objective Bayesian optimization (MOBO) allows for personalization of the optimization procedure. Preferences are often abstracted in the form of an unknown utility function, estimated through pairwise comparisons of potential outcomes. However, utility-driven MOBO methods can yield solutions that are dominated by nearby solutions, as non-dominance is not enforced. Additionally, classical MOBO commonly relies on estimating the entire Pareto-front to identify the Pareto-optimal solutions, which can be expensive and ignore user preferences. Here, we present a new method, termed preference-utility-balanced MOBO (PUB-MOBO), that allows users to disambiguate between near-Pareto candidate solutions. PUB-MOBO combines utility-based MOBO with local multi-gradient descent to refine user-preferred solutions to be near-Pareto-optimal. To this end, we propose a novel preference-dominated utility function that concurrently preserves user-preferences and dominance amongst candidate solutions. A key advantage of PUB-MOBO is that the local search is restricted to a (small) region of the Pareto-front directed by user preferences, alleviating the need to estimate the entire Pareto-front. PUB-MOBO is tested on three synthetic benchmark problems: DTLZ1, DTLZ2 and DH1, as well as on three real-world problems: Vehicle Safety, Conceptual Marine Design, and Car Side Impact. PUB-MOBO consistently outperforms state-of-the-art competitors in terms of proximity to the Pareto-front and utility regret across all the problems.
Meta-Learning for Physically-Constrained Neural System Identification
Jan 10, 2025



We present a gradient-based meta-learning framework for rapid adaptation of neural state-space models (NSSMs) for black-box system identification. When applicable, we also incorporate domain-specific physical constraints to improve the accuracy of the NSSM. The major benefit of our approach is that instead of relying solely on data from a single target system, our framework utilizes data from a diverse set of source systems, enabling learning from limited target data, as well as with few online training iterations. Through benchmark examples, we demonstrate the potential of our approach, study the effect of fine-tuning subnetworks rather than full fine-tuning, and report real-world case studies to illustrate the practical application and generalizability of the approach to practical problems with physical-constraints. Specifically, we show that the meta-learned models result in improved downstream performance in model-based state estimation in indoor localization and energy systems.
BEACON: A Bayesian Optimization Strategy for Novelty Search in Expensive Black-Box Systems
Jun 05, 2024Novelty search (NS) refers to a class of exploration algorithms that automatically uncover diverse system behaviors through simulations or experiments. Systematically obtaining diverse outcomes is a key component in many real-world design problems such as material and drug discovery, neural architecture search, reinforcement learning, and robot navigation. Since the relationship between the inputs and outputs (i.e., behaviors) of these complex systems is typically not available in closed form, NS requires a black-box perspective. Consequently, popular NS algorithms rely on evolutionary optimization and other meta-heuristics that require intensive sampling of the input space, which is impractical when the system is expensive to evaluate. We propose a Bayesian optimization inspired algorithm for sample-efficient NS that is specifically designed for such expensive black-box systems. Our approach models the input-to-behavior mapping with multi-output Gaussian processes (MOGP) and selects the next point to evaluate by maximizing a novelty metric that depends on a posterior sample drawn from the MOGP that promotes both exploration and exploitation. By leveraging advances in efficient posterior sampling and high-dimensional Gaussian process modeling, we discuss how our approach can be made scalable with respect to both amount of data and number of inputs. We test our approach on ten synthetic benchmark problems and eight real-world problems (with up to 2133 inputs) including new applications such as discovery of diverse metal organic frameworks for use in clean energy technology. We show that our approach greatly outperforms existing NS algorithms by finding substantially larger sets of diverse behaviors under limited sample budgets.
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Apr 18, 2024



In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the \textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from \textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
Safe multi-agent motion planning under uncertainty for drones using filtered reinforcement learning
Oct 31, 2023We consider the problem of safe multi-agent motion planning for drones in uncertain, cluttered workspaces. For this problem, we present a tractable motion planner that builds upon the strengths of reinforcement learning and constrained-control-based trajectory planning. First, we use single-agent reinforcement learning to learn motion plans from data that reach the target but may not be collision-free. Next, we use a convex optimization, chance constraints, and set-based methods for constrained control to ensure safety, despite the uncertainty in the workspace, agent motion, and sensing. The proposed approach can handle state and control constraints on the agents, and enforce collision avoidance among themselves and with static obstacles in the workspace with high probability. The proposed approach yields a safe, real-time implementable, multi-agent motion planner that is simpler to train than methods based solely on learning. Numerical simulations and experiments show the efficacy of the approach.
Physics-Informed Machine Learning for Modeling and Control of Dynamical Systems
Jun 24, 2023Physics-informed machine learning (PIML) is a set of methods and tools that systematically integrate machine learning (ML) algorithms with physical constraints and abstract mathematical models developed in scientific and engineering domains. As opposed to purely data-driven methods, PIML models can be trained from additional information obtained by enforcing physical laws such as energy and mass conservation. More broadly, PIML models can include abstract properties and conditions such as stability, convexity, or invariance. The basic premise of PIML is that the integration of ML and physics can yield more effective, physically consistent, and data-efficient models. This paper aims to provide a tutorial-like overview of the recent advances in PIML for dynamical system modeling and control. Specifically, the paper covers an overview of the theory, fundamental concepts and methods, tools, and applications on topics of: 1) physics-informed learning for system identification; 2) physics-informed learning for control; 3) analysis and verification of PIML models; and 4) physics-informed digital twins. The paper is concluded with a perspective on open challenges and future research opportunities.
Violation-Aware Contextual Bayesian Optimization for Controller Performance Optimization with Unmodeled Constraints
Jan 28, 2023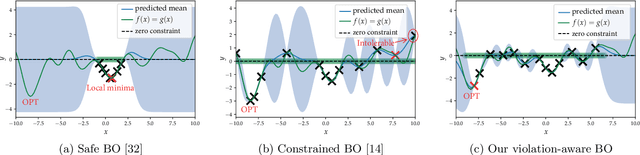



We study the problem of performance optimization of closed-loop control systems with unmodeled dynamics. Bayesian optimization (BO) has been demonstrated to be effective for improving closed-loop performance by automatically tuning controller gains or reference setpoints in a model-free manner. However, BO methods have rarely been tested on dynamical systems with unmodeled constraints and time-varying ambient conditions. In this paper, we propose a violation-aware contextual BO algorithm (VACBO) that optimizes closed-loop performance while simultaneously learning constraint-feasible solutions under time-varying ambient conditions. Unlike classical constrained BO methods which allow unlimited constraint violations, or 'safe' BO algorithms that are conservative and try to operate with near-zero violations, we allow budgeted constraint violations to improve constraint learning and accelerate optimization. We demonstrate the effectiveness of our proposed VACBO method for energy minimization of industrial vapor compression systems under time-varying ambient temperature and humidity.
Meta-Learning of Neural State-Space Models Using Data From Similar Systems
Nov 14, 2022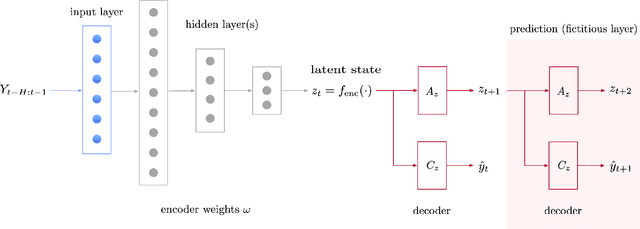



Deep neural state-space models (SSMs) provide a powerful tool for modeling dynamical systems solely using operational data. Typically, neural SSMs are trained using data collected from the actual system under consideration, despite the likely existence of operational data from similar systems which have previously been deployed in the field. In this paper, we propose the use of model-agnostic meta-learning (MAML) for constructing deep encoder network-based SSMs, by leveraging a combination of archived data from similar systems (used to meta-train offline) and limited data from the actual system (used for rapid online adaptation). We demonstrate using a numerical example that meta-learning can result in more accurate neural SSM models than supervised- or transfer-learning, despite few adaptation steps and limited online data. Additionally, we show that by carefully partitioning and adapting the encoder layers while fixing the state-transition operator, we can achieve comparable performance to MAML while reducing online adaptation complexity.
Optimizing Closed-Loop Performance with Data from Similar Systems: A Bayesian Meta-Learning Approach
Oct 31, 2022



Bayesian optimization (BO) has demonstrated potential for optimizing control performance in data-limited settings, especially for systems with unknown dynamics or unmodeled performance objectives. The BO algorithm efficiently trades-off exploration and exploitation by leveraging uncertainty estimates using surrogate models. These surrogates are usually learned using data collected from the target dynamical system to be optimized. Intuitively, the convergence rate of BO is better for surrogate models that can accurately predict the target system performance. In classical BO, initial surrogate models are constructed using very limited data points, and therefore rarely yield accurate predictions of system performance. In this paper, we propose the use of meta-learning to generate an initial surrogate model based on data collected from performance optimization tasks performed on a variety of systems that are different to the target system. To this end, we employ deep kernel networks (DKNs) which are simple to train and which comprise encoded Gaussian process models that integrate seamlessly with classical BO. The effectiveness of our proposed DKN-BO approach for speeding up control system performance optimization is demonstrated using a well-studied nonlinear system with unknown dynamics and an unmodeled performance function.