 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWasserstein Distributionally Robust Bayesian Optimization with Continuous Context
Mar 26, 2025We address the challenge of sequential data-driven decision-making under context distributional uncertainty. This problem arises in numerous real-world scenarios where the learner optimizes black-box objective functions in the presence of uncontrollable contextual variables. We consider the setting where the context distribution is uncertain but known to lie within an ambiguity set defined as a ball in the Wasserstein distance. We propose a novel algorithm for Wasserstein Distributionally Robust Bayesian Optimization that can handle continuous context distributions while maintaining computational tractability. Our theoretical analysis combines recent results in self-normalized concentration in Hilbert spaces and finite-sample bounds for distributionally robust optimization to establish sublinear regret bounds that match state-of-the-art results. Through extensive comparisons with existing approaches on both synthetic and real-world problems, we demonstrate the simplicity, effectiveness, and practical applicability of our proposed method.
Contractivity and linear convergence in bilinear saddle-point problems: An operator-theoretic approach
Oct 18, 2024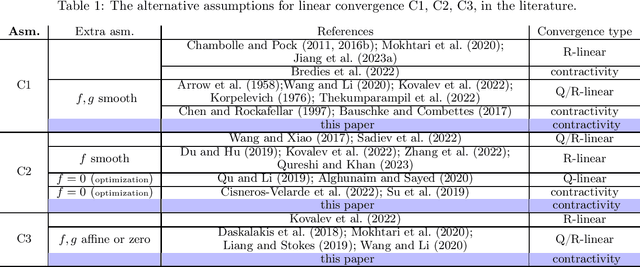
We study the convex-concave bilinear saddle-point problem $\min_x \max_y f(x) + y^\top Ax - g(y)$, where both, only one, or none of the functions $f$ and $g$ are strongly convex, and suitable rank conditions on the matrix $A$ hold. The solution of this problem is at the core of many machine learning tasks. By employing tools from operator theory, we systematically prove the contractivity (in turn, the linear convergence) of several first-order primal-dual algorithms, including the Chambolle-Pock method. Our approach results in concise and elegant proofs, and it yields new convergence guarantees and tighter bounds compared to known results.
Safe Time-Varying Optimization based on Gaussian Processes with Spatio-Temporal Kernel
Sep 26, 2024Ensuring safety is a key aspect in sequential decision making problems, such as robotics or process control. The complexity of the underlying systems often makes finding the optimal decision challenging, especially when the safety-critical system is time-varying. Overcoming the problem of optimizing an unknown time-varying reward subject to unknown time-varying safety constraints, we propose TVSafeOpt, a new algorithm built on Bayesian optimization with a spatio-temporal kernel. The algorithm is capable of safely tracking a time-varying safe region without the need for explicit change detection. Optimality guarantees are also provided for the algorithm when the optimization problem becomes stationary. We show that TVSafeOpt compares favorably against SafeOpt on synthetic data, both regarding safety and optimality. Evaluation on a realistic case study with gas compressors confirms that TVSafeOpt ensures safety when solving time-varying optimization problems with unknown reward and safety functions.
Online Residual Learning from Offline Experts for Pedestrian Tracking
Sep 09, 2024In this paper, we consider the problem of predicting unknown targets from data. We propose Online Residual Learning (ORL), a method that combines online adaptation with offline-trained predictions. At a lower level, we employ multiple offline predictions generated before or at the beginning of the prediction horizon. We augment every offline prediction by learning their respective residual error concerning the true target state online, using the recursive least squares algorithm. At a higher level, we treat the augmented lower-level predictors as experts, adopting the Prediction with Expert Advice framework. We utilize an adaptive softmax weighting scheme to form an aggregate prediction and provide guarantees for ORL in terms of regret. We employ ORL to boost performance in the setting of online pedestrian trajectory prediction. Based on data from the Stanford Drone Dataset, we show that ORL can demonstrate best-of-both-worlds performance.
Randomized algorithms and PAC bounds for inverse reinforcement learning in continuous spaces
May 24, 2024This work studies discrete-time discounted Markov decision processes with continuous state and action spaces and addresses the inverse problem of inferring a cost function from observed optimal behavior. We first consider the case in which we have access to the entire expert policy and characterize the set of solutions to the inverse problem by using occupation measures, linear duality, and complementary slackness conditions. To avoid trivial solutions and ill-posedness, we introduce a natural linear normalization constraint. This results in an infinite-dimensional linear feasibility problem, prompting a thorough analysis of its properties. Next, we use linear function approximators and adopt a randomized approach, namely the scenario approach and related probabilistic feasibility guarantees, to derive epsilon-optimal solutions for the inverse problem. We further discuss the sample complexity for a desired approximation accuracy. Finally, we deal with the more realistic case where we only have access to a finite set of expert demonstrations and a generative model and provide bounds on the error made when working with samples.
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Apr 18, 2024



In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the \textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from \textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
Finite Sample Frequency Domain Identification
Apr 01, 2024We study non-parametric frequency-domain system identification from a finite-sample perspective. We assume an open loop scenario where the excitation input is periodic and consider the Empirical Transfer Function Estimate (ETFE), where the goal is to estimate the frequency response at certain desired (evenly-spaced) frequencies, given input-output samples. We show that under sub-Gaussian colored noise (in time-domain) and stability assumptions, the ETFE estimates are concentrated around the true values. The error rate is of the order of $\mathcal{O}((d_{\mathrm{u}}+\sqrt{d_{\mathrm{u}}d_{\mathrm{y}}})\sqrt{M/N_{\mathrm{tot}}})$, where $N_{\mathrm{tot}}$ is the total number of samples, $M$ is the number of desired frequencies, and $d_{\mathrm{u}},\,d_{\mathrm{y}}$ are the dimensions of the input and output signals respectively. This rate remains valid for general irrational transfer functions and does not require a finite order state-space representation. By tuning $M$, we obtain a $N_{\mathrm{tot}}^{-1/3}$ finite-sample rate for learning the frequency response over all frequencies in the $ \mathcal{H}_{\infty}$ norm. Our result draws upon an extension of the Hanson-Wright inequality to semi-infinite matrices. We study the finite-sample behavior of ETFE in simulations.
Online Identification of Stochastic Continuous-Time Wiener Models Using Sampled Data
Mar 09, 2024It is well known that ignoring the presence of stochastic disturbances in the identification of stochastic Wiener models leads to asymptotically biased estimators. On the other hand, optimal statistical identification, via likelihood-based methods, is sensitive to the assumptions on the data distribution and is usually based on relatively complex sequential Monte Carlo algorithms. We develop a simple recursive online estimation algorithm based on an output-error predictor, for the identification of continuous-time stochastic parametric Wiener models through stochastic approximation. The method is applicable to generic model parameterizations and, as demonstrated in the numerical simulation examples, it is robust with respect to the assumptions on the spectrum of the disturbance process.
Predictive Linear Online Tracking for Unknown Targets
Feb 15, 2024In this paper, we study the problem of online tracking in linear control systems, where the objective is to follow a moving target. Unlike classical tracking control, the target is unknown, non-stationary, and its state is revealed sequentially, thus, fitting the framework of online non-stochastic control. We consider the case of quadratic costs and propose a new algorithm, called predictive linear online tracking (PLOT). The algorithm uses recursive least squares with exponential forgetting to learn a time-varying dynamic model of the target. The learned model is used in the optimal policy under the framework of receding horizon control. We show the dynamic regret of PLOT scales with $\mathcal{O}(\sqrt{TV_T})$, where $V_T$ is the total variation of the target dynamics and $T$ is the time horizon. Unlike prior work, our theoretical results hold for non-stationary targets. We implement PLOT on a real quadrotor and provide open-source software, thus, showcasing one of the first successful applications of online control methods on real hardware.
Towards a Systems Theory of Algorithms
Jan 25, 2024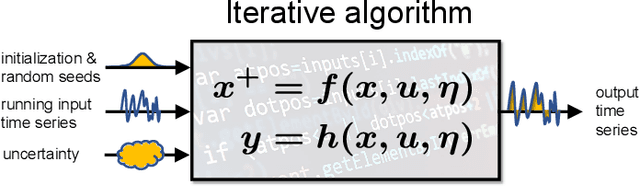
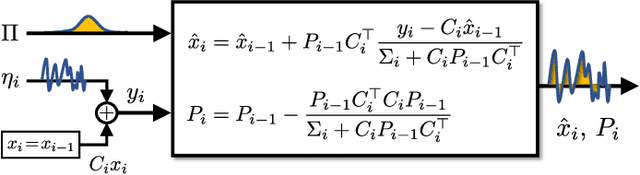
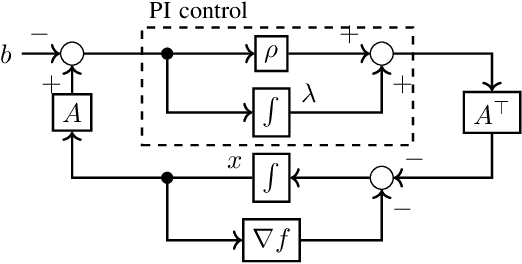
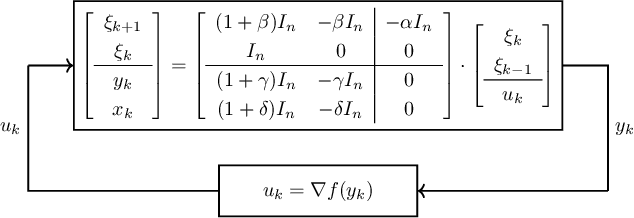
Traditionally, numerical algorithms are seen as isolated pieces of code confined to an {\em in silico} existence. However, this perspective is not appropriate for many modern computational approaches in control, learning, or optimization, wherein {\em in vivo} algorithms interact with their environment. Examples of such {\em open} include various real-time optimization-based control strategies, reinforcement learning, decision-making architectures, online optimization, and many more. Further, even {\em closed} algorithms in learning or optimization are increasingly abstracted in block diagrams with interacting dynamic modules and pipelines. In this opinion paper, we state our vision on a to-be-cultivated {\em systems theory of algorithms} and argue in favour of viewing algorithms as open dynamical systems interacting with other algorithms, physical systems, humans, or databases. Remarkably, the manifold tools developed under the umbrella of systems theory also provide valuable insights into this burgeoning paradigm shift and its accompanying challenges in the algorithmic world. We survey various instances where the principles of algorithmic systems theory are being developed and outline pertinent modeling, analysis, and design challenges.