 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe multi-agent motion planning under uncertainty for drones using filtered reinforcement learning
Oct 31, 2023We consider the problem of safe multi-agent motion planning for drones in uncertain, cluttered workspaces. For this problem, we present a tractable motion planner that builds upon the strengths of reinforcement learning and constrained-control-based trajectory planning. First, we use single-agent reinforcement learning to learn motion plans from data that reach the target but may not be collision-free. Next, we use a convex optimization, chance constraints, and set-based methods for constrained control to ensure safety, despite the uncertainty in the workspace, agent motion, and sensing. The proposed approach can handle state and control constraints on the agents, and enforce collision avoidance among themselves and with static obstacles in the workspace with high probability. The proposed approach yields a safe, real-time implementable, multi-agent motion planner that is simpler to train than methods based solely on learning. Numerical simulations and experiments show the efficacy of the approach.
SupeRBNN: Randomized Binary Neural Network Using Adiabatic Superconductor Josephson Devices
Sep 21, 2023



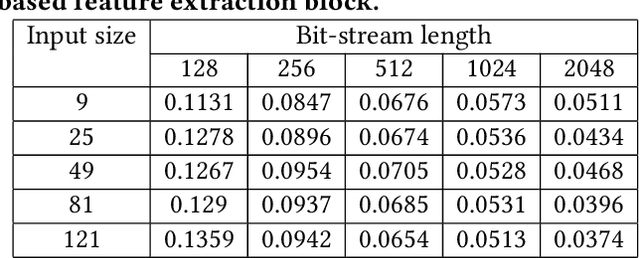
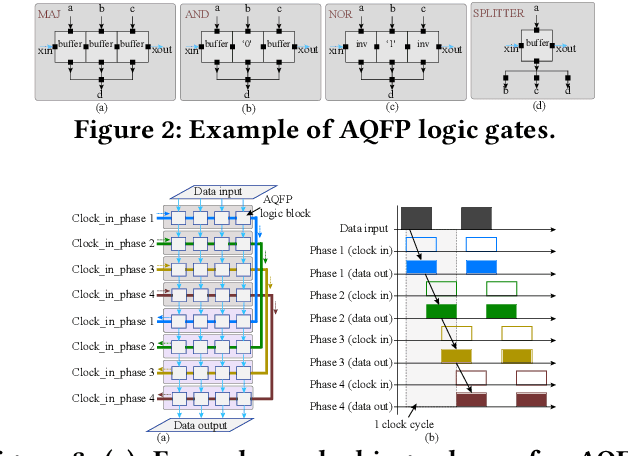
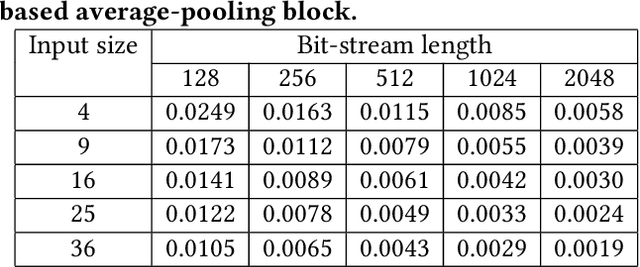
Adiabatic Quantum-Flux-Parametron (AQFP) is a superconducting logic with extremely high energy efficiency. By employing the distinct polarity of current to denote logic `0' and `1', AQFP devices serve as excellent carriers for binary neural network (BNN) computations. Although recent research has made initial strides toward developing an AQFP-based BNN accelerator, several critical challenges remain, preventing the design from being a comprehensive solution. In this paper, we propose SupeRBNN, an AQFP-based randomized BNN acceleration framework that leverages software-hardware co-optimization to eventually make the AQFP devices a feasible solution for BNN acceleration. Specifically, we investigate the randomized behavior of the AQFP devices and analyze the impact of crossbar size on current attenuation, subsequently formulating the current amplitude into the values suitable for use in BNN computation. To tackle the accumulation problem and improve overall hardware performance, we propose a stochastic computing-based accumulation module and a clocking scheme adjustment-based circuit optimization method. We validate our SupeRBNN framework across various datasets and network architectures, comparing it with implementations based on different technologies, including CMOS, ReRAM, and superconducting RSFQ/ERSFQ. Experimental results demonstrate that our design achieves an energy efficiency of approximately 7.8x10^4 times higher than that of the ReRAM-based BNN framework while maintaining a similar level of model accuracy. Furthermore, when compared with superconductor-based counterparts, our framework demonstrates at least two orders of magnitude higher energy efficiency.
Stability-Certified Reinforcement Learning via Spectral Normalization
Dec 26, 2020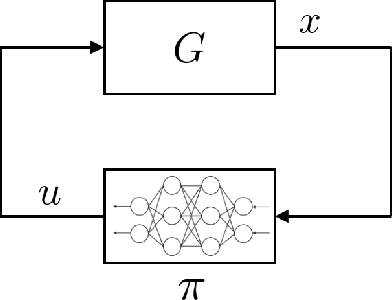
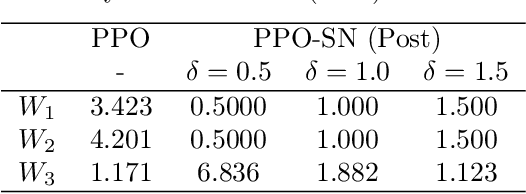
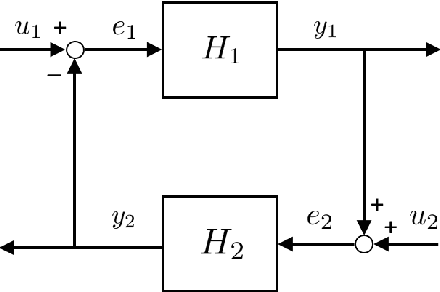
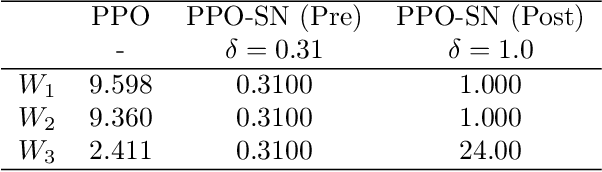
In this article, two types of methods from different perspectives based on spectral normalization are described for ensuring the stability of the system controlled by a neural network. The first one is that the L2 gain of the feedback system is bounded less than 1 to satisfy the stability condition derived from the small-gain theorem. While explicitly including the stability condition, the first method may provide an insufficient performance on the neural network controller due to its strict stability condition. To overcome this difficulty, the second one is proposed, which improves the performance while ensuring the local stability with a larger region of attraction. In the second method, the stability is ensured by solving linear matrix inequalities after training the neural network controller. The spectral normalization proposed in this article improves the feasibility of the a-posteriori stability test by constructing tighter local sectors. The numerical experiments show that the second method provides enough performance compared with the first one while ensuring enough stability compared with the existing reinforcement learning algorithms.
A Stochastic-Computing based Deep Learning Framework using Adiabatic Quantum-Flux-Parametron SuperconductingTechnology
Jul 22, 2019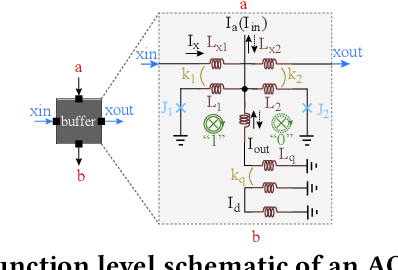
The Adiabatic Quantum-Flux-Parametron (AQFP) superconducting technology has been recently developed, which achieves the highest energy efficiency among superconducting logic families, potentially huge gain compared with state-of-the-art CMOS. In 2016, the successful fabrication and testing of AQFP-based circuits with the scale of 83,000 JJs have demonstrated the scalability and potential of implementing large-scale systems using AQFP. As a result, it will be promising for AQFP in high-performance computing and deep space applications, with Deep Neural Network (DNN) inference acceleration as an important example. Besides ultra-high energy efficiency, AQFP exhibits two unique characteristics: the deep pipelining nature since each AQFP logic gate is connected with an AC clock signal, which increases the difficulty to avoid RAW hazards; the second is the unique opportunity of true random number generation (RNG) using a single AQFP buffer, far more efficient than RNG in CMOS. We point out that these two characteristics make AQFP especially compatible with the \emph{stochastic computing} (SC) technique, which uses a time-independent bit sequence for value representation, and is compatible with the deep pipelining nature. Further, the application of SC has been investigated in DNNs in prior work, and the suitability has been illustrated as SC is more compatible with approximate computations. This work is the first to develop an SC-based DNN acceleration framework using AQFP technology.