 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal Locomotion
Apr 24, 2025In this paper we address the simultaneous collision detection and force estimation problem for quadrupedal locomotion using joint encoder information and the robot dynamics only. We design an interacting multiple-model Kalman filter (IMM-KF) that estimates the external force exerted on the robot and multiple possible contact modes. The method is invariant to any gait pattern design. Our approach leverages pseudo-measurement information of the external forces based on the robot dynamics and encoder information. Based on the estimated contact mode and external force, we design a reflex motion and an admittance controller for the swing leg to avoid collisions by adjusting the leg's reference motion. Additionally, we implement a force-adaptive model predictive controller to enhance balancing. Simulation ablatation studies and experiments show the efficacy of the approach.
Meta-Learning for Physically-Constrained Neural System Identification
Jan 10, 2025



We present a gradient-based meta-learning framework for rapid adaptation of neural state-space models (NSSMs) for black-box system identification. When applicable, we also incorporate domain-specific physical constraints to improve the accuracy of the NSSM. The major benefit of our approach is that instead of relying solely on data from a single target system, our framework utilizes data from a diverse set of source systems, enabling learning from limited target data, as well as with few online training iterations. Through benchmark examples, we demonstrate the potential of our approach, study the effect of fine-tuning subnetworks rather than full fine-tuning, and report real-world case studies to illustrate the practical application and generalizability of the approach to practical problems with physical-constraints. Specifically, we show that the meta-learned models result in improved downstream performance in model-based state estimation in indoor localization and energy systems.
Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding
Aug 01, 2024



This paper introduces a novel nonlinear stochastic model predictive control path integral (MPPI) method, which considers chance constraints on system states. The proposed belief-space stochastic MPPI (BSS-MPPI) applies Monte-Carlo sampling to evaluate state distributions resulting from underlying systematic disturbances, and utilizes a Control Barrier Function (CBF) inspired heuristic in belief space to fulfill the specified chance constraints. Compared to several previous stochastic predictive control methods, our approach applies to general nonlinear dynamics without requiring the computationally expensive system linearization step. Moreover, the BSS-MPPI controller can solve optimization problems without limiting the form of the objective function and chance constraints. By multi-threading the sampling process using a GPU, we can achieve fast real-time planning for time- and safety-critical tasks such as autonomous racing. Our results on a realistic race-car simulation study show significant reductions in constraint violation compared to some of the prior MPPI approaches, while being comparable in computation times.
Simultaneous State Estimation and Contact Detection for Legged Robots by Multiple-Model Kalman Filtering
Apr 04, 2024



This paper proposes an algorithm for combined contact detection and state estimation for legged robots. The proposed algorithm models the robot's movement as a switched system, in which different modes relate to different feet being in contact with the ground. The key element in the proposed algorithm is an interacting multiple-model Kalman filter, which identifies the currently-active mode defining contacts, while estimating the state. The rationale for the proposed estimation framework is that contacts (and contact forces) impact the robot's state and vice versa. This paper presents validation studies with a quadruped using (i) the high-fidelity simulator Gazebo for a comparison with ground truth values and a baseline estimator, and (ii) hardware experiments with the Unitree A1 robot. The simulation study shows that the proposed algorithm outperforms the baseline estimator, which does not simultaneous detect contacts. The hardware experiments showcase the applicability of the proposed algorithm and highlights the ability to detect contacts.
Gaussian Processes with State-Dependent Noise for Stochastic Control
May 25, 2023

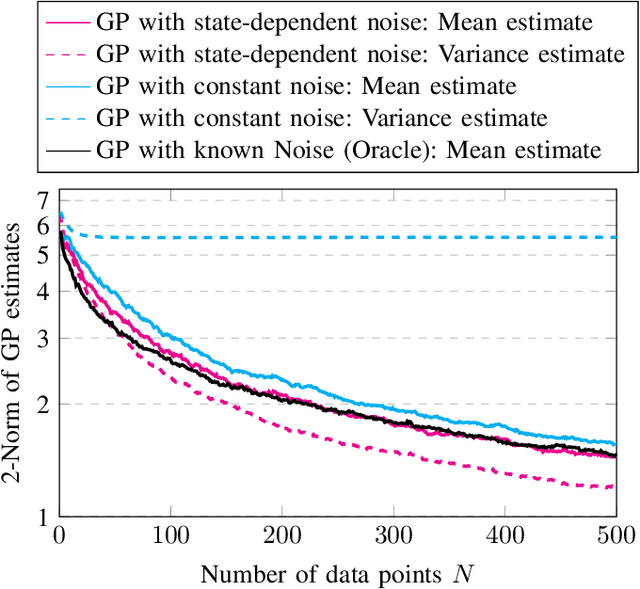
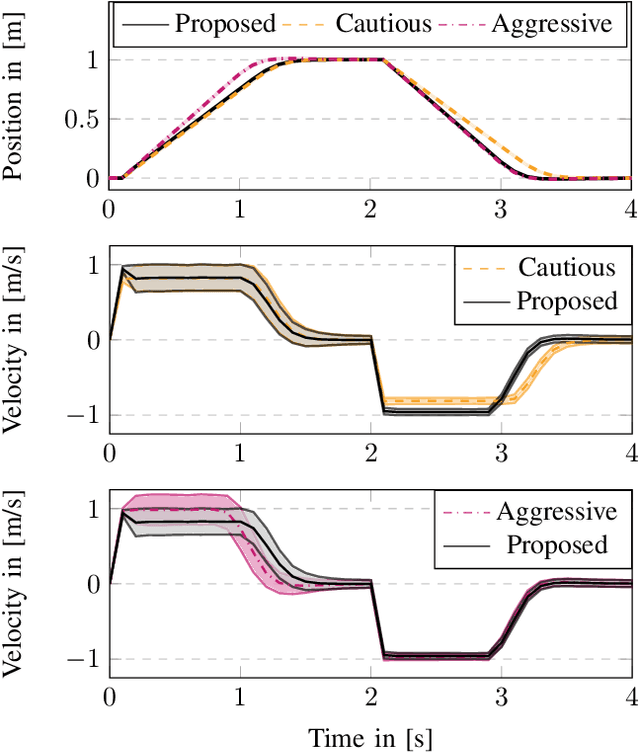
This paper considers a stochastic control framework, in which the residual model uncertainty of the dynamical system is learned using a Gaussian Process (GP). In the proposed formulation, the residual model uncertainty consists of a nonlinear function and state-dependent noise. The proposed formulation uses a posterior-GP to approximate the residual model uncertainty and a prior-GP to account for state-dependent noise. The two GPs are interdependent and are thus learned jointly using an iterative algorithm. Theoretical properties of the iterative algorithm are established. Advantages of the proposed state-dependent formulation include (i) faster convergence of the GP estimate to the unknown function as the GP learns which data samples are more trustworthy and (ii) an accurate estimate of state-dependent noise, which can, e.g., be useful for a controller or decision-maker to determine the uncertainty of an action. Simulation studies highlight these two advantages.
Mobility, Communication and Computation Aware Federated Learning for Internet of Vehicles
May 17, 2022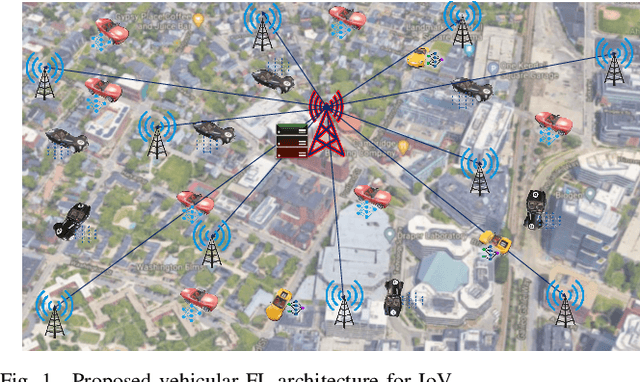
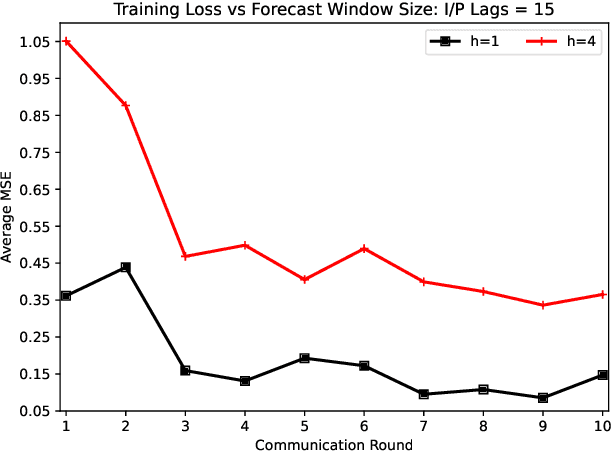
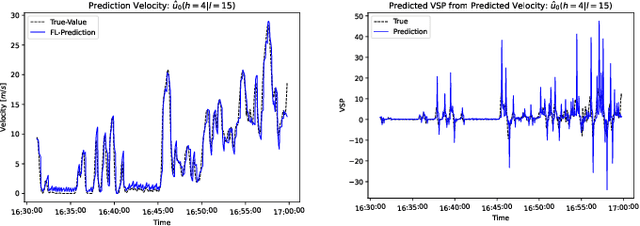
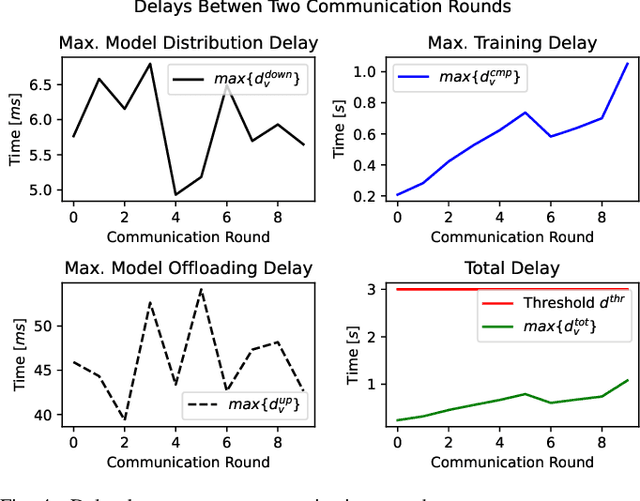
While privacy concerns entice connected and automated vehicles to incorporate on-board federated learning (FL) solutions, an integrated vehicle-to-everything communication with heterogeneous computation power aware learning platform is urgently necessary to make it a reality. Motivated by this, we propose a novel mobility, communication and computation aware online FL platform that uses on-road vehicles as learning agents. Thanks to the advanced features of modern vehicles, the on-board sensors can collect data as vehicles travel along their trajectories, while the on-board processors can train machine learning models using the collected data. To take the high mobility of vehicles into account, we consider the delay as a learning parameter and restrict it to be less than a tolerable threshold. To satisfy this threshold, the central server accepts partially trained models, the distributed roadside units (a) perform downlink multicast beamforming to minimize global model distribution delay and (b) allocate optimal uplink radio resources to minimize local model offloading delay, and the vehicle agents conduct heterogeneous local model training. Using real-world vehicle trace datasets, we validate our FL solutions. Simulation shows that the proposed integrated FL platform is robust and outperforms baseline models. With reasonable local training episodes, it can effectively satisfy all constraints and deliver near ground truth multi-horizon velocity and vehicle-specific power predictions.
Exploiting Temporal Relations on Radar Perception for Autonomous Driving
Apr 03, 2022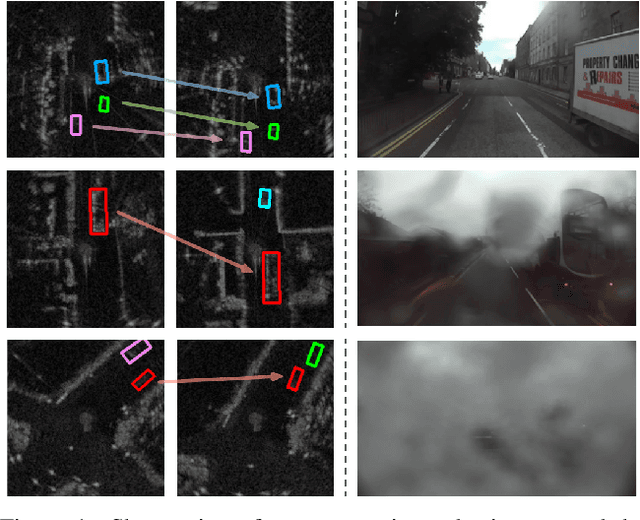
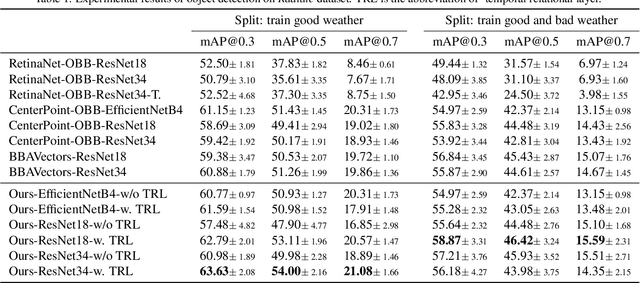
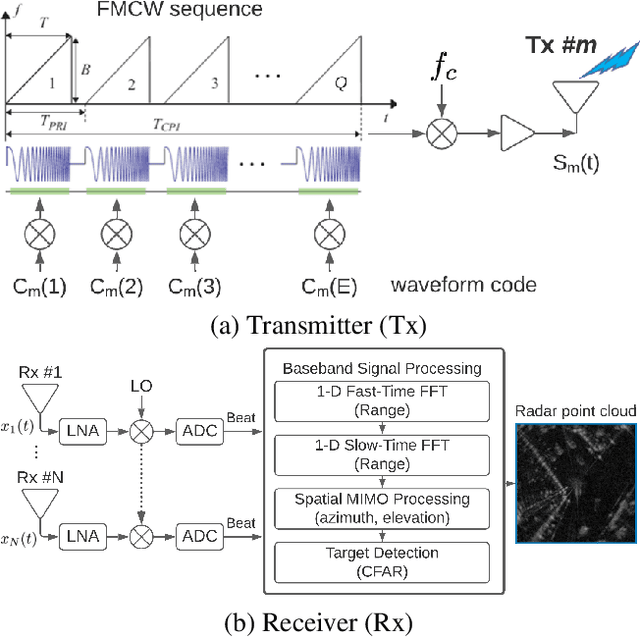
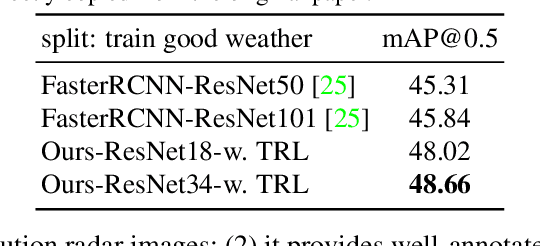
We consider the object recognition problem in autonomous driving using automotive radar sensors. Comparing to Lidar sensors, radar is cost-effective and robust in all-weather conditions for perception in autonomous driving. However, radar signals suffer from low angular resolution and precision in recognizing surrounding objects. To enhance the capacity of automotive radar, in this work, we exploit the temporal information from successive ego-centric bird-eye-view radar image frames for radar object recognition. We leverage the consistency of an object's existence and attributes (size, orientation, etc.), and propose a temporal relational layer to explicitly model the relations between objects within successive radar images. In both object detection and multiple object tracking, we show the superiority of our method compared to several baseline approaches.
Automated Controller Calibration by Kalman Filtering
Nov 21, 2021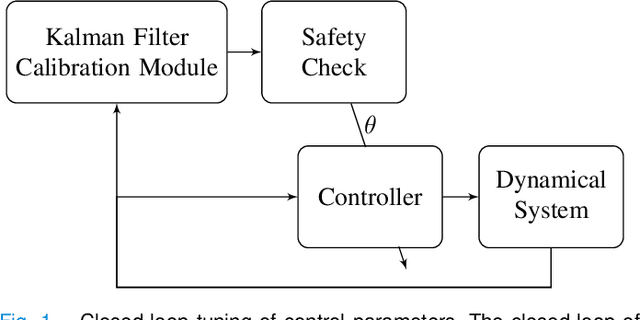

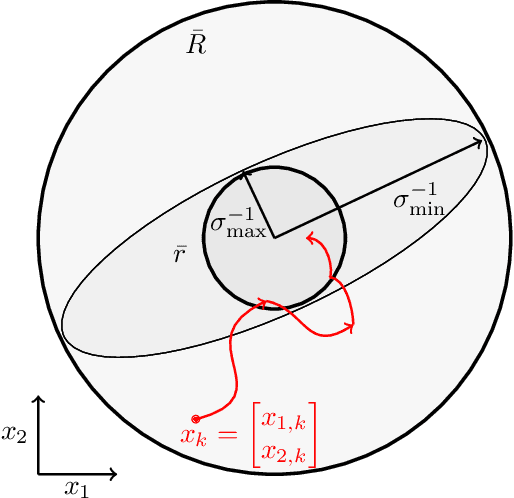
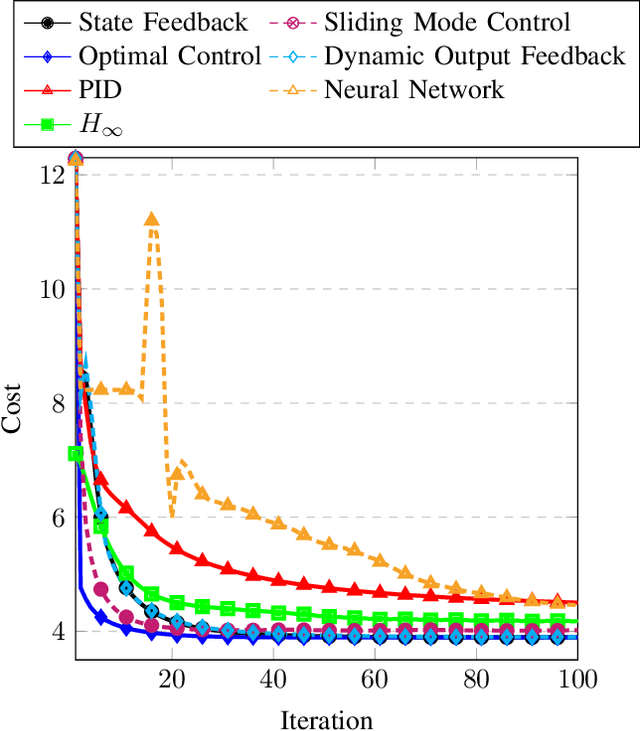
This paper proposes a method for calibrating control parameters. Examples of such control parameters are gains of PID controllers, weights of a cost function for optimal control, filter coefficients, the sliding surface of a sliding mode controller, or weights of a neural network. Hence, the proposed method can be applied to a wide range of controllers. The method uses a Kalman filter that estimates control parameters rather than the system's state, using data of closed-loop system operation. The control parameter calibration is driven by a training objective, which encompasses specifications on the performance of the dynamical system. The calibration method tunes the parameters online and robustly, is computationally efficient, has low data storage requirements, and is easy to implement making it appealing for many real-time applications. Simulation results show that the method is able to learn control parameters quickly (approximately 24% average decay factor of closed-loop cost), is able to tune the parameters to compensate for disturbances (approximately 29% improvement on tracking precision), and is robust to noise. Further, a simulation study with the high-fidelity vehicle simulator CarSim shows that the method can calibrate controllers of a complex dynamical system online, which indicates its applicability to a real-world system.
Sampling-based Algorithms for Optimal Motion Planning Using Closed-loop Prediction
Jan 23, 2016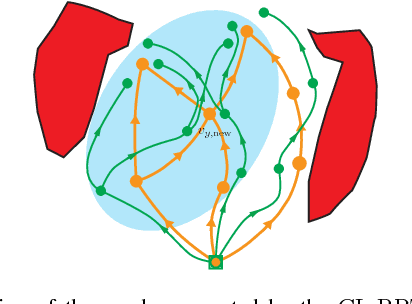
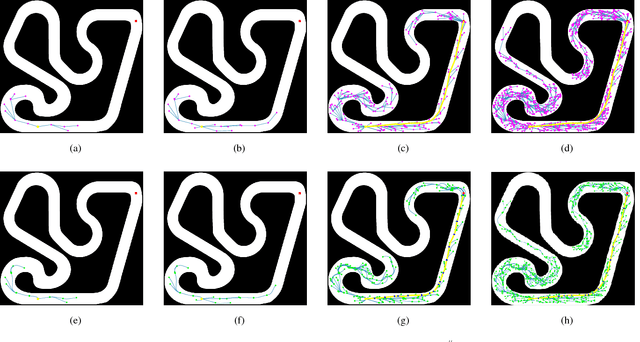
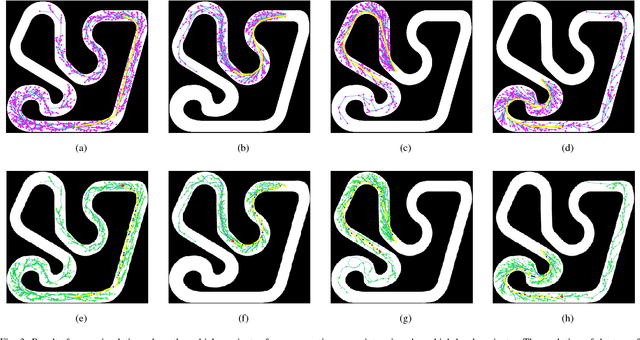
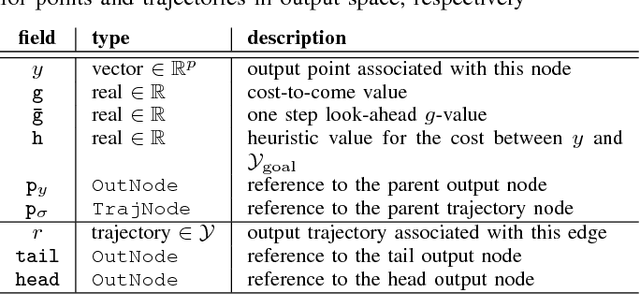
Motion planning under differential constraints, kinodynamic motion planning, is one of the canonical problems in robotics. Currently, state-of-the-art methods evolve around kinodynamic variants of popular sampling-based algorithms, such as Rapidly-exploring Random Trees (RRTs). However, there are still challenges remaining, for example, how to include complex dynamics while guaranteeing optimality. If the open-loop dynamics are unstable, exploration by random sampling in control space becomes inefficient. We describe a new sampling-based algorithm, called CL-RRT#, which leverages ideas from the RRT# algorithm and a variant of the RRT algorithm that generates trajectories using closed-loop prediction. The idea of planning with closed-loop prediction allows us to handle complex unstable dynamics and avoids the need to find computationally hard steering procedures. The search technique presented in the RRT# algorithm allows us to improve the solution quality by searching over alternative reference trajectories. Numerical simulations using a nonholonomic system demonstrate the benefits of the proposed approach.