 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Temporal Relations on Radar Perception for Autonomous Driving
Paper and Code
Apr 03, 2022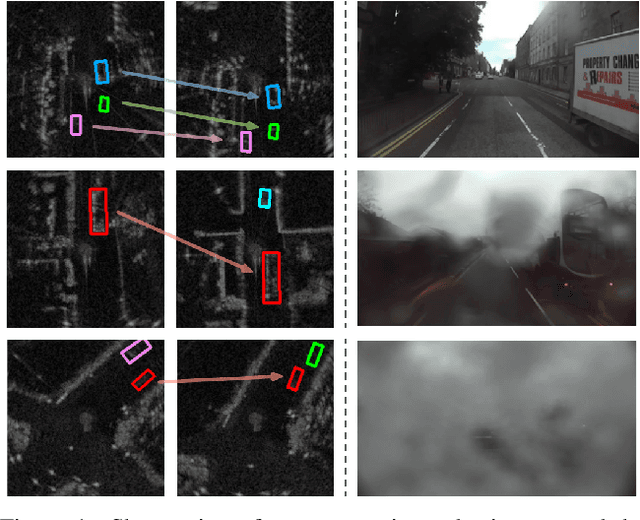
We consider the object recognition problem in autonomous driving using automotive radar sensors. Comparing to Lidar sensors, radar is cost-effective and robust in all-weather conditions for perception in autonomous driving. However, radar signals suffer from low angular resolution and precision in recognizing surrounding objects. To enhance the capacity of automotive radar, in this work, we exploit the temporal information from successive ego-centric bird-eye-view radar image frames for radar object recognition. We leverage the consistency of an object's existence and attributes (size, orientation, etc.), and propose a temporal relational layer to explicitly model the relations between objects within successive radar images. In both object detection and multiple object tracking, we show the superiority of our method compared to several baseline approaches.