 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobility, Communication and Computation Aware Federated Learning for Internet of Vehicles
Paper and Code
May 17, 2022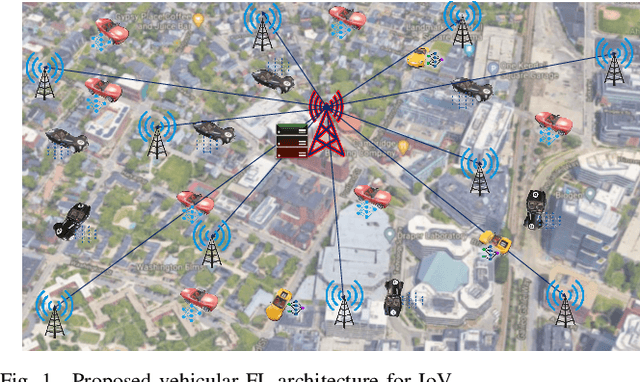
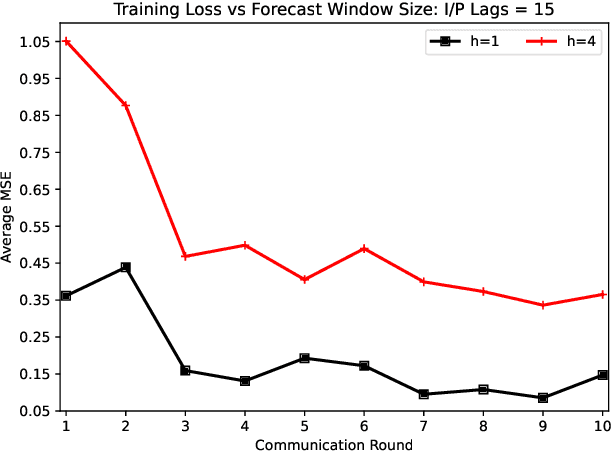
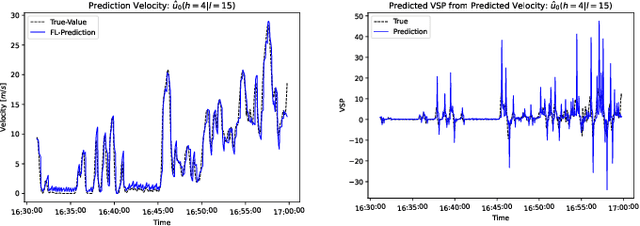
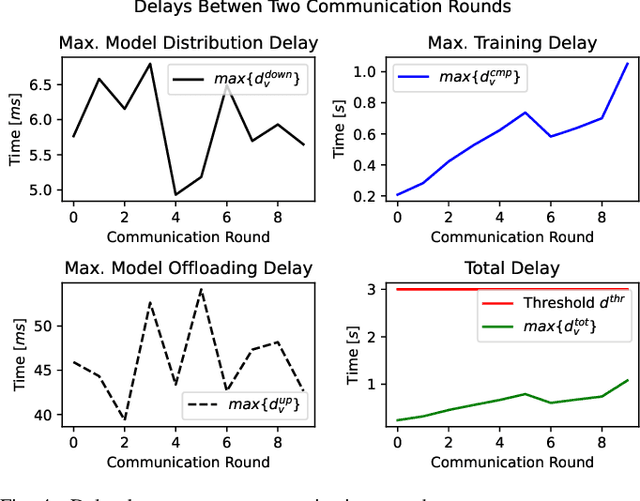
While privacy concerns entice connected and automated vehicles to incorporate on-board federated learning (FL) solutions, an integrated vehicle-to-everything communication with heterogeneous computation power aware learning platform is urgently necessary to make it a reality. Motivated by this, we propose a novel mobility, communication and computation aware online FL platform that uses on-road vehicles as learning agents. Thanks to the advanced features of modern vehicles, the on-board sensors can collect data as vehicles travel along their trajectories, while the on-board processors can train machine learning models using the collected data. To take the high mobility of vehicles into account, we consider the delay as a learning parameter and restrict it to be less than a tolerable threshold. To satisfy this threshold, the central server accepts partially trained models, the distributed roadside units (a) perform downlink multicast beamforming to minimize global model distribution delay and (b) allocate optimal uplink radio resources to minimize local model offloading delay, and the vehicle agents conduct heterogeneous local model training. Using real-world vehicle trace datasets, we validate our FL solutions. Simulation shows that the proposed integrated FL platform is robust and outperforms baseline models. With reasonable local training episodes, it can effectively satisfy all constraints and deliver near ground truth multi-horizon velocity and vehicle-specific power predictions.