 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEA-3DGS: Efficient and Adaptive 3D Gaussians with Highly Enhanced Quality for outdoor scenes
May 16, 2025Efficient scene representations are essential for many real-world applications, especially those involving spatial measurement. Although current NeRF-based methods have achieved impressive results in reconstructing building-scale scenes, they still suffer from slow training and inference speeds due to time-consuming stochastic sampling. Recently, 3D Gaussian Splatting (3DGS) has demonstrated excellent performance with its high-quality rendering and real-time speed, especially for objects and small-scale scenes. However, in outdoor scenes, its point-based explicit representation lacks an effective adjustment mechanism, and the millions of Gaussian points required often lead to memory constraints during training. To address these challenges, we propose EA-3DGS, a high-quality real-time rendering method designed for outdoor scenes. First, we introduce a mesh structure to regulate the initialization of Gaussian components by leveraging an adaptive tetrahedral mesh that partitions the grid and initializes Gaussian components on each face, effectively capturing geometric structures in low-texture regions. Second, we propose an efficient Gaussian pruning strategy that evaluates each 3D Gaussian's contribution to the view and prunes accordingly. To retain geometry-critical Gaussian points, we also present a structure-aware densification strategy that densifies Gaussian points in low-curvature regions. Additionally, we employ vector quantization for parameter quantization of Gaussian components, significantly reducing disk space requirements with only a minimal impact on rendering quality. Extensive experiments on 13 scenes, including eight from four public datasets (MatrixCity-Aerial, Mill-19, Tanks \& Temples, WHU) and five self-collected scenes acquired through UAV photogrammetry measurement from SCUT-CA and plateau regions, further demonstrate the superiority of our method.
TReND: Transformer derived features and Regularized NMF for neonatal functional network Delineation
Mar 04, 2025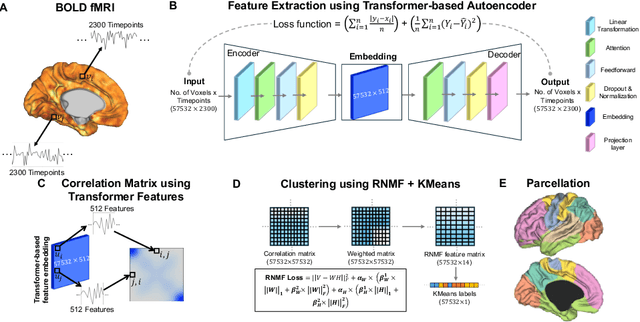
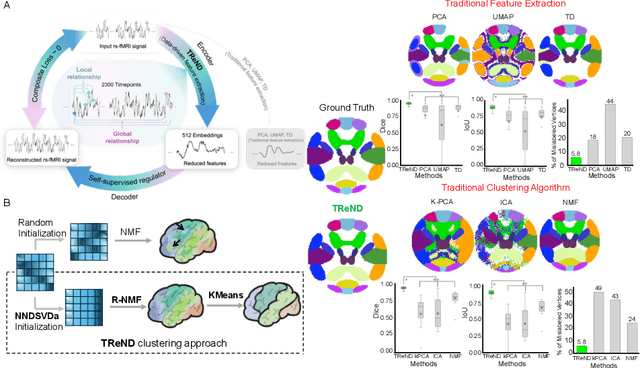
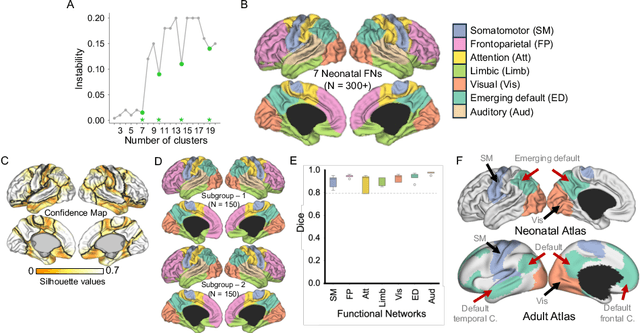
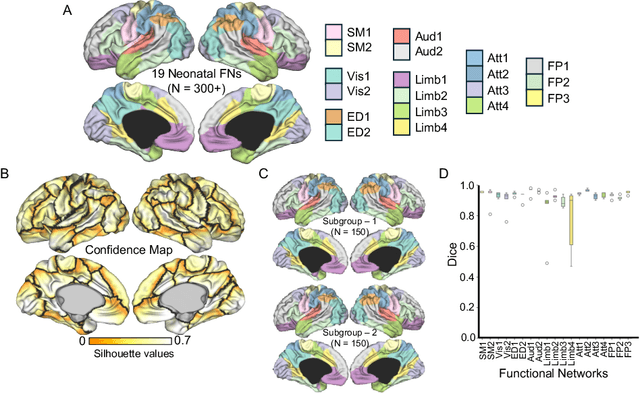
Precise parcellation of functional networks (FNs) of early developing human brain is the fundamental basis for identifying biomarker of developmental disorders and understanding functional development. Resting-state fMRI (rs-fMRI) enables in vivo exploration of functional changes, but adult FN parcellations cannot be directly applied to the neonates due to incomplete network maturation. No standardized neonatal functional atlas is currently available. To solve this fundamental issue, we propose TReND, a novel and fully automated self-supervised transformer-autoencoder framework that integrates regularized nonnegative matrix factorization (RNMF) to unveil the FNs in neonates. TReND effectively disentangles spatiotemporal features in voxel-wise rs-fMRI data. The framework integrates confidence-adaptive masks into transformer self-attention layers to mitigate noise influence. A self supervised decoder acts as a regulator to refine the encoder's latent embeddings, which serve as reliable temporal features. For spatial coherence, we incorporate brain surface-based geodesic distances as spatial encodings along with functional connectivity from temporal features. The TReND clustering approach processes these features under sparsity and smoothness constraints, producing robust and biologically plausible parcellations. We extensively validated our TReND framework on three different rs-fMRI datasets: simulated, dHCP and HCP-YA against comparable traditional feature extraction and clustering techniques. Our results demonstrated the superiority of the TReND framework in the delineation of neonate FNs with significantly better spatial contiguity and functional homogeneity. Collectively, we established TReND, a novel and robust framework, for neonatal FN delineation. TReND-derived neonatal FNs could serve as a neonatal functional atlas for perinatal populations in health and disease.
Mobility, Communication and Computation Aware Federated Learning for Internet of Vehicles
May 17, 2022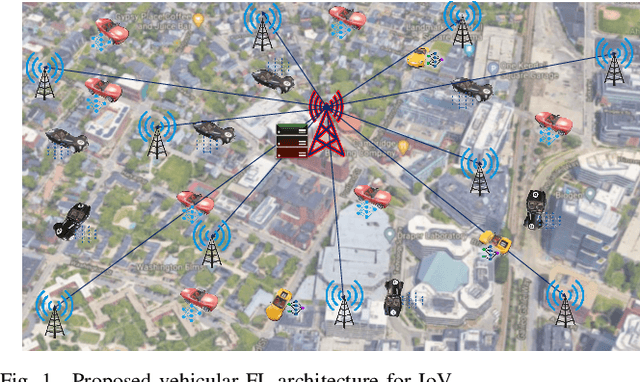
While privacy concerns entice connected and automated vehicles to incorporate on-board federated learning (FL) solutions, an integrated vehicle-to-everything communication with heterogeneous computation power aware learning platform is urgently necessary to make it a reality. Motivated by this, we propose a novel mobility, communication and computation aware online FL platform that uses on-road vehicles as learning agents. Thanks to the advanced features of modern vehicles, the on-board sensors can collect data as vehicles travel along their trajectories, while the on-board processors can train machine learning models using the collected data. To take the high mobility of vehicles into account, we consider the delay as a learning parameter and restrict it to be less than a tolerable threshold. To satisfy this threshold, the central server accepts partially trained models, the distributed roadside units (a) perform downlink multicast beamforming to minimize global model distribution delay and (b) allocate optimal uplink radio resources to minimize local model offloading delay, and the vehicle agents conduct heterogeneous local model training. Using real-world vehicle trace datasets, we validate our FL solutions. Simulation shows that the proposed integrated FL platform is robust and outperforms baseline models. With reasonable local training episodes, it can effectively satisfy all constraints and deliver near ground truth multi-horizon velocity and vehicle-specific power predictions.