 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Controller Calibration by Kalman Filtering
Paper and Code
Nov 21, 2021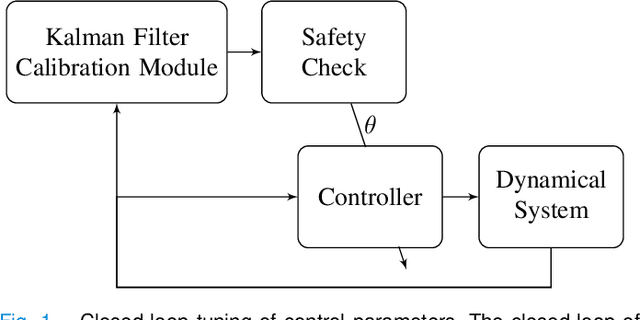

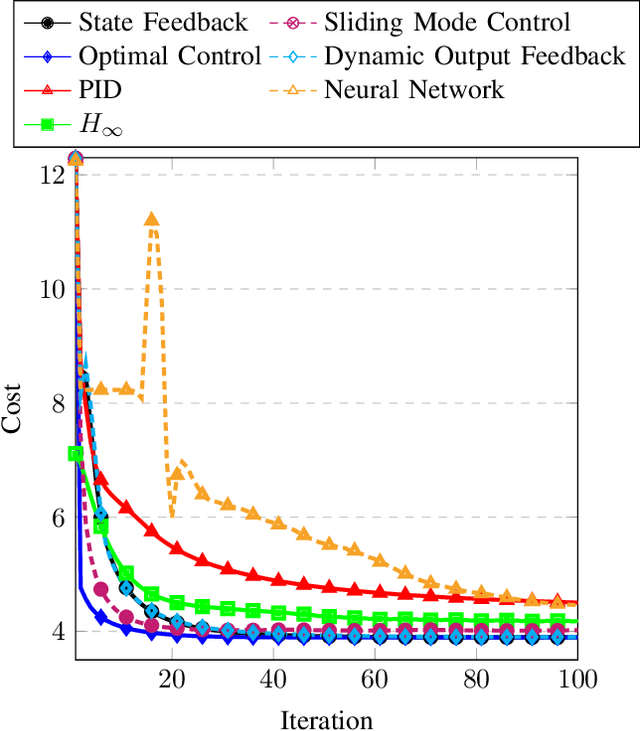
This paper proposes a method for calibrating control parameters. Examples of such control parameters are gains of PID controllers, weights of a cost function for optimal control, filter coefficients, the sliding surface of a sliding mode controller, or weights of a neural network. Hence, the proposed method can be applied to a wide range of controllers. The method uses a Kalman filter that estimates control parameters rather than the system's state, using data of closed-loop system operation. The control parameter calibration is driven by a training objective, which encompasses specifications on the performance of the dynamical system. The calibration method tunes the parameters online and robustly, is computationally efficient, has low data storage requirements, and is easy to implement making it appealing for many real-time applications. Simulation results show that the method is able to learn control parameters quickly (approximately 24% average decay factor of closed-loop cost), is able to tune the parameters to compensate for disturbances (approximately 29% improvement on tracking precision), and is robust to noise. Further, a simulation study with the high-fidelity vehicle simulator CarSim shows that the method can calibrate controllers of a complex dynamical system online, which indicates its applicability to a real-world system.