 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLESA: Vision-Language Embodied Safety Agent for Human Activity Monitoring
Jun 02, 2026As AI systems increasingly assist humans in physical tasks, ensuring safety becomes paramount -- physical actions carry immediate and irreversible consequences that digital errors do not. We introduce the Vision-Language Embodied Safety Agent (VLESA), a framework that monitors human activities from egocentric video and triggers real-time safety interventions when dangerous actions are predicted. VLESA addresses intent-dependent safety where identical actions can be safe or dangerous depending on context. A dataset pairing egocentric frames with goal-conditioned safety annotations is introduced, enabling a goal-conditioned safety Q-filter trained via GRPO that evaluates actions with respect to inferred intent without retraining. On top of that, an intent-action prediction agent is proposed to jointly infer goals and predict future actions from video. On the ASIMOV-2.0 benchmark, VLESA achieves higher intervention accuracy at the exact ground-truth frame compared to baselines, while the GRPO-trained Q-filter improves action safety by over 41 percentage points through goal-conditioned constrained decoding. Code is available at https://github.com/HanjiangHu/VLESA.
Verified Task-Space Motion Planning Under Joint-Space Constraints
May 21, 2026Reactive task-space planners such as Bug2 operate with fixed Cartesian step sizes and are unaware of the manipulator's joint-angle limits. When the Jacobian is poorly conditioned, even small Cartesian steps can demand joint changes that exceed admissible bounds; clipping the joints to their limits causes tracking drift and can prevent goal reaching entirely. We address this by computing, at each planning step, the largest Cartesian hyperrectangle that is \emph{certifiably reachable} under joint displacement bounds. Using a second-order polynomial approximation of the inverse kinematics and the S-procedure, we formulate a small semidefinite program whose solution yields the certified half-width~$λ^\star$. An equivalent bisection procedure exploiting the quadratic structure solves the certification in sub-millisecond time. Integrating this certificate with Bug2 yields a planner whose step size adapts to local kinematic conditioning. In a statistical evaluation over 94 adversarial scenarios spanning six joint-limit settings, the SOS-verified planner achieves \emph{zero} joint-limit violations with a 100\% goal-reaching rate, whereas a standard Bug2 planner violates joint limits in 6--11\% of steps and fails to reach the goal in up to 18\% of scenarios.
Offline Imitation Learning upon Arbitrary Demonstrations by Pre-Training Dynamics Representations
Aug 20, 2025Limited data has become a major bottleneck in scaling up offline imitation learning (IL). In this paper, we propose enhancing IL performance under limited expert data by introducing a pre-training stage that learns dynamics representations, derived from factorizations of the transition dynamics. We first theoretically justify that the optimal decision variable of offline IL lies in the representation space, significantly reducing the parameters to learn in the downstream IL. Moreover, the dynamics representations can be learned from arbitrary data collected with the same dynamics, allowing the reuse of massive non-expert data and mitigating the limited data issues. We present a tractable loss function inspired by noise contrastive estimation to learn the dynamics representations at the pre-training stage. Experiments on MuJoCo demonstrate that our proposed algorithm can mimic expert policies with as few as a single trajectory. Experiments on real quadrupeds show that we can leverage pre-trained dynamics representations from simulator data to learn to walk from a few real-world demonstrations.
Delayed Expansion AGT: Kinodynamic Planning with Application to Tractor-Trailer Parking
Jun 16, 2025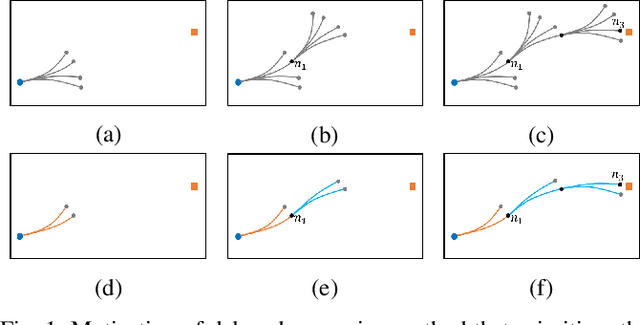
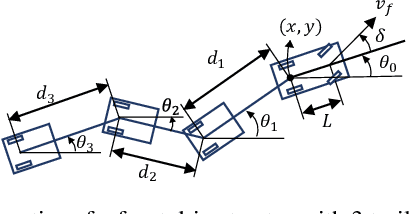
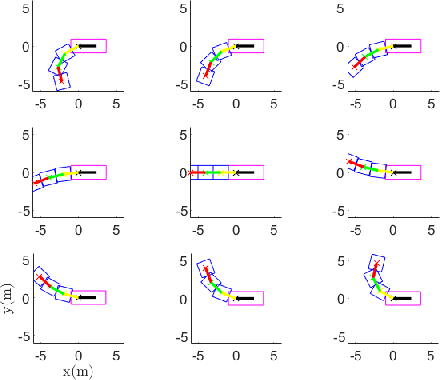
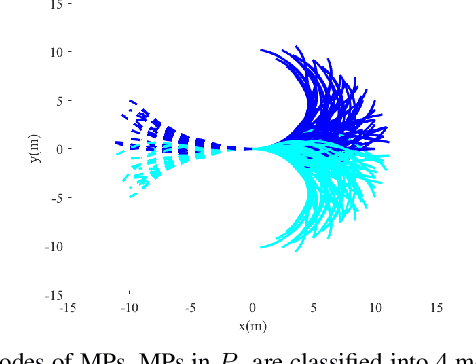
Kinodynamic planning of articulated vehicles in cluttered environments faces additional challenges arising from high-dimensional state space and complex system dynamics. Built upon [1],[2], this work proposes the DE-AGT algorithm that grows a tree using pre-computed motion primitives (MPs) and A* heuristics. The first feature of DE-AGT is a delayed expansion of MPs. In particular, the MPs are divided into different modes, which are ranked online. With the MP classification and prioritization, DE-AGT expands the most promising mode of MPs first, which eliminates unnecessary computation and finds solutions faster. To obtain the cost-to-go heuristic for nonholonomic articulated vehicles, we rely on supervised learning and train neural networks for fast and accurate cost-to-go prediction. The learned heuristic is used for online mode ranking and node selection. Another feature of DE-AGT is the improved goal-reaching. Exactly reaching a goal state usually requires a constant connection checking with the goal by solving steering problems -- non-trivial and time-consuming for articulated vehicles. The proposed termination scheme overcomes this challenge by tightly integrating a light-weight trajectory tracking controller with the search process. DE-AGT is implemented for autonomous parking of a general car-like tractor with 3-trailer. Simulation results show an average of 10x acceleration compared to a previous method.
Motion Planning for Autonomous Vehicles: When Model Predictive Control Meets Ensemble Kalman Smoothing
May 10, 2025Safe and efficient motion planning is of fundamental importance for autonomous vehicles. This paper investigates motion planning based on nonlinear model predictive control (NMPC) over a neural network vehicle model. We aim to overcome the high computational costs that arise in NMPC of the neural network model due to the highly nonlinear and nonconvex optimization. In a departure from numerical optimization solutions, we reformulate the problem of NMPC-based motion planning as a Bayesian estimation problem, which seeks to infer optimal planning decisions from planning objectives. Then, we use a sequential ensemble Kalman smoother to accomplish the estimation task, exploiting its high computational efficiency for complex nonlinear systems. The simulation results show an improvement in computational speed by orders of magnitude, indicating the potential of the proposed approach for practical motion planning.
Simultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal Locomotion
Apr 24, 2025In this paper we address the simultaneous collision detection and force estimation problem for quadrupedal locomotion using joint encoder information and the robot dynamics only. We design an interacting multiple-model Kalman filter (IMM-KF) that estimates the external force exerted on the robot and multiple possible contact modes. The method is invariant to any gait pattern design. Our approach leverages pseudo-measurement information of the external forces based on the robot dynamics and encoder information. Based on the estimated contact mode and external force, we design a reflex motion and an admittance controller for the swing leg to avoid collisions by adjusting the leg's reference motion. Additionally, we implement a force-adaptive model predictive controller to enhance balancing. Simulation ablatation studies and experiments show the efficacy of the approach.
Path Planning and Motion Control for Accurate Positioning of Car-like Robots
May 10, 2024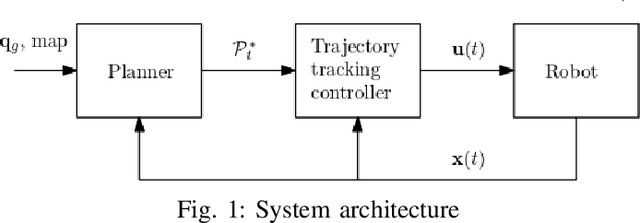
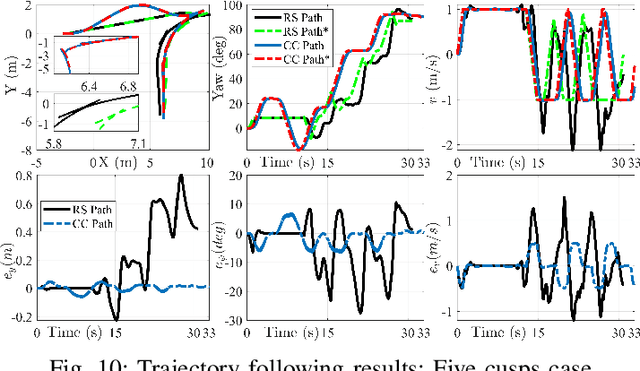
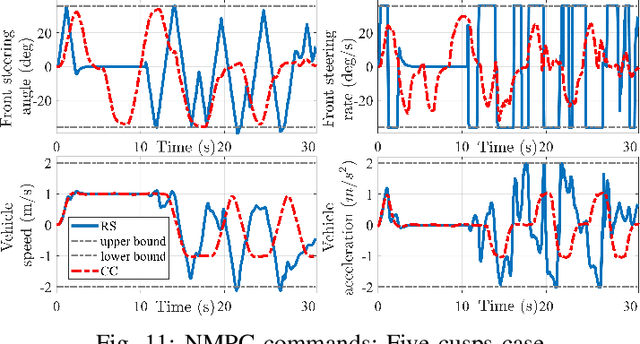
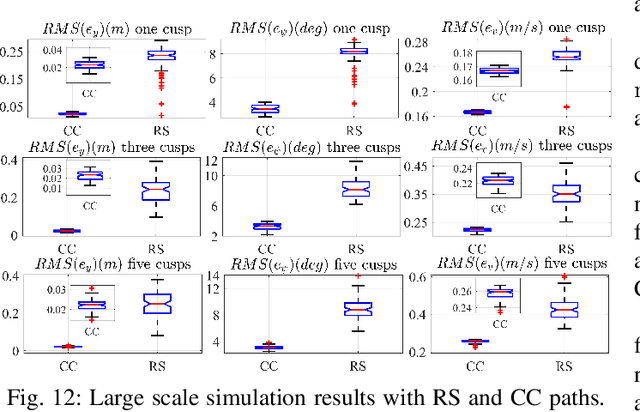
This paper investigates the planning and control for accurate positioning of car-like robots. We propose a solution that integrates two modules: a motion planner, facilitated by the rapidly-exploring random tree algorithm and continuous-curvature (CC) steering technique, generates a CC trajectory as a reference; and a nonlinear model predictive controller (NMPC) regulates the robot to accurately track the reference trajectory. Based on the $\mu$-tangency conditions in prior art, we derive explicit existence conditions and develop associated computation methods for a special class of CC paths which not only admit the same driving patterns as Reeds-Shepp paths but also consist of cusp-free clothoid turns. Afterwards, we create an autonomous vehicle parking scenario where the NMPC endeavors to follow the reference trajectory. Feasibility and computational efficiency of the CC steering are validated by numerical simulation. CarSim-Simulink joint simulations statistically verify that with exactly same NMPC, the closed-loop system with CC trajectories as references substantially outperforms the case where Reeds-Shepp trajectories are used as references.
A Differentiable Dynamic Modeling Approach to Integrated Motion Planning and Actuator Physical Design for Mobile Manipulators
May 01, 2024This paper investigates the differentiable dynamic modeling of mobile manipulators to facilitate efficient motion planning and physical design of actuators, where the actuator design is parameterized by physically meaningful motor geometry parameters. These parameters impact the manipulator's link mass, inertia, center-of-mass, torque constraints, and angular velocity constraints, influencing control authority in motion planning and trajectory tracking control. A motor's maximum torque/speed and how the design parameters affect the dynamics are modeled analytically, facilitating differentiable and analytical dynamic modeling. Additionally, an integrated locomotion and manipulation planning problem is formulated with direct collocation discretization, using the proposed differentiable dynamics and motor parameterization. Such dynamics are required to capture the dynamic coupling between the base and the manipulator. Numerical experiments demonstrate the effectiveness of differentiable dynamics in speeding up optimization and advantages in task completion time and energy consumption over established sequential motion planning approach. Finally, this paper introduces a simultaneous actuator design and motion planning framework, providing numerical results to validate the proposed differentiable modeling approach for co-design problems.
iPolicy: Incremental Policy Algorithms for Feedback Motion Planning
Jan 05, 2024This paper presents policy-based motion planning for robotic systems. The motion planning literature has been mostly focused on open-loop trajectory planning which is followed by tracking online. In contrast, we solve the problem of path planning and controller synthesis simultaneously by solving the related feedback control problem. We present a novel incremental policy (iPolicy) algorithm for motion planning, which integrates sampling-based methods and set-valued optimal control methods to compute feedback controllers for the robotic system. In particular, we use sampling to incrementally construct the state space of the system. Asynchronous value iterations are performed on the sampled state space to synthesize the incremental policy feedback controller. We show the convergence of the estimates to the optimal value function in continuous state space. Numerical results with various different dynamical systems (including nonholonomic systems) verify the optimality and effectiveness of iPolicy.
Application-Oriented Co-Design of Motors and Motions for a 6DOF Robot Manipulator
Oct 04, 2023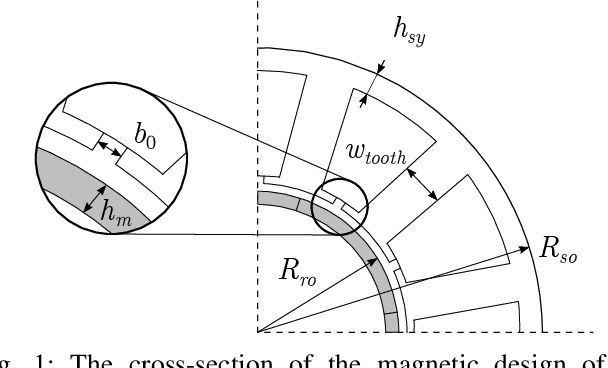
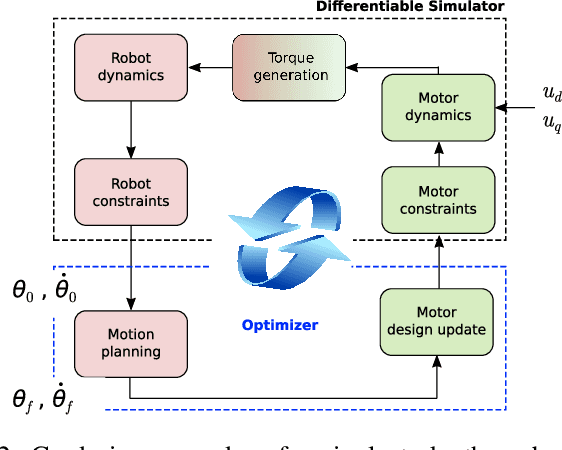
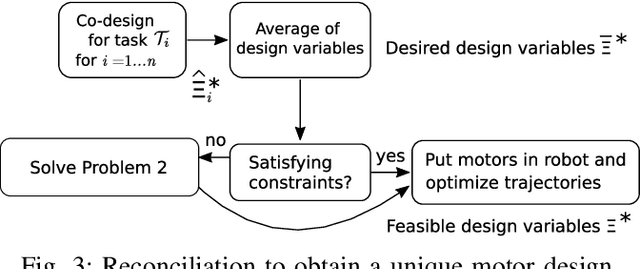
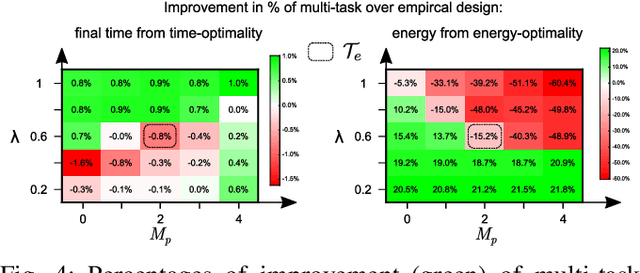
This work investigates an application-driven co-design problem where the motion and motors of a six degrees of freedom robotic manipulator are optimized simultaneously, and the application is characterized by a set of tasks. Unlike the state-of-the-art which selects motors from a product catalogue and performs co-design for a single task, this work designs the motor geometry as well as motion for a specific application. Contributions are made towards solving the proposed co-design problem in a computationally-efficient manner. First, a two-step process is proposed, where multiple motor designs are identified by optimizing motions and motors for multiple tasks one by one, and then are reconciled to determine the final motor design. Second, magnetic equivalent circuit modeling is exploited to establish the analytic mapping from motor design parameters to dynamic models and objective functions to facilitate the subsequent differentiable simulation. Third, a direct-collocation-based differentiable simulator of motor and robotic arm dynamics is developed to balance the computational complexity and numerical stability. Simulation verifies that higher performance for a specific application can be achieved with the multi-task method, compared to several benchmark co-design methods.