 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning for Autonomous Vehicles: When Model Predictive Control Meets Ensemble Kalman Smoothing
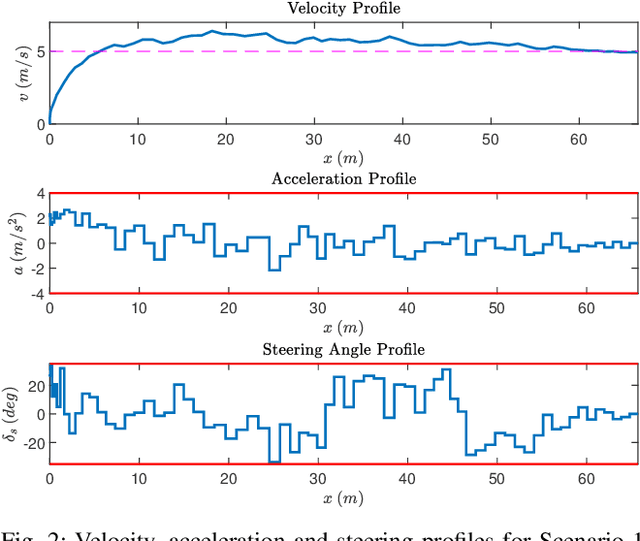
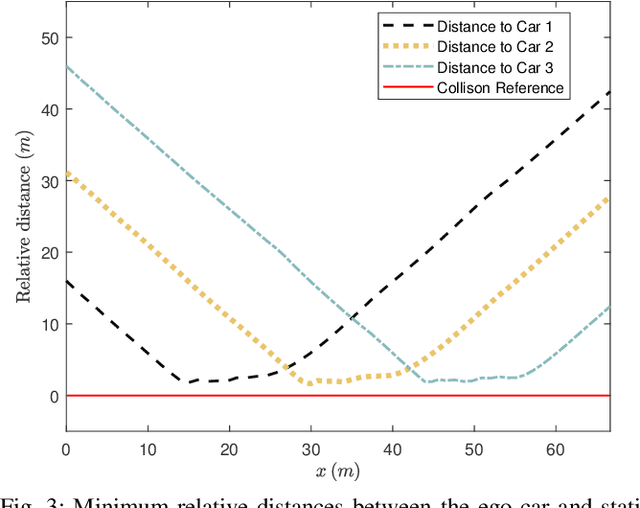
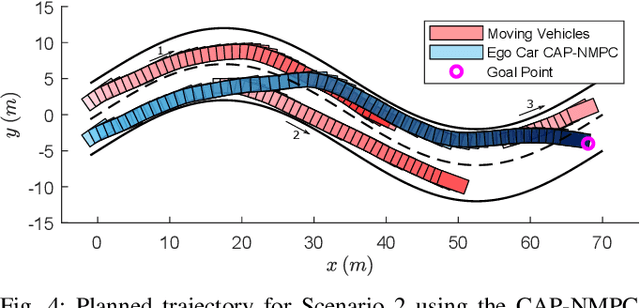
May 10, 2025Safe and efficient motion planning is of fundamental importance for autonomous vehicles. This paper investigates motion planning based on nonlinear model predictive control (NMPC) over a neural network vehicle model. We aim to overcome the high computational costs that arise in NMPC of the neural network model due to the highly nonlinear and nonconvex optimization. In a departure from numerical optimization solutions, we reformulate the problem of NMPC-based motion planning as a Bayesian estimation problem, which seeks to infer optimal planning decisions from planning objectives. Then, we use a sequential ensemble Kalman smoother to accomplish the estimation task, exploiting its high computational efficiency for complex nonlinear systems. The simulation results show an improvement in computational speed by orders of magnitude, indicating the potential of the proposed approach for practical motion planning.
Bayesian Inferential Motion Planning Using Heavy-Tailed Distributions
Mar 27, 2025
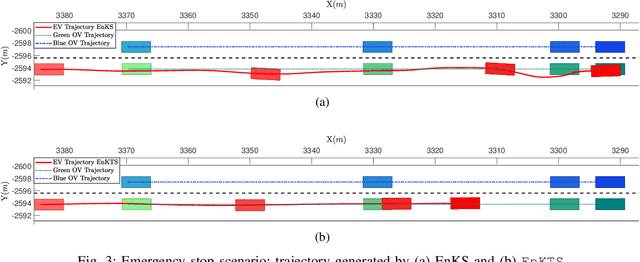

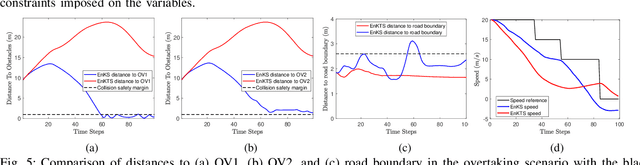
Robots rely on motion planning to navigate safely and efficiently while performing various tasks. In this paper, we investigate motion planning through Bayesian inference, where motion plans are inferred based on planning objectives and constraints. However, existing Bayesian motion planning methods often struggle to explore low-probability regions of the planning space, where high-quality plans may reside. To address this limitation, we propose the use of heavy-tailed distributions -- specifically, Student's-$t$ distributions -- to enhance probabilistic inferential search for motion plans. We develop a novel sequential single-pass smoothing approach that integrates Student's-$t$ distribution with Monte Carlo sampling. A special case of this approach is ensemble Kalman smoothing, which depends on short-tailed Gaussian distributions. We validate the proposed approach through simulations in autonomous vehicle motion planning, demonstrating its superior performance in planning, sampling efficiency, and constraint satisfaction compared to ensemble Kalman smoothing. While focused on motion planning, this work points to the broader potential of heavy-tailed distributions in enhancing probabilistic decision-making in robotics.
MultiNash-PF: A Particle Filtering Approach for Computing Multiple Local Generalized Nash Equilibria in Trajectory Games
Oct 07, 2024


Modern-world robotics involves complex environments where multiple autonomous agents must interact with each other and other humans. This necessitates advanced interactive multi-agent motion planning techniques. Generalized Nash equilibrium(GNE), a solution concept in constrained game theory, provides a mathematical model to predict the outcome of interactive motion planning, where each agent needs to account for other agents in the environment. However, in practice, multiple local GNEs may exist. Finding a single GNE itself is complex as it requires solving coupled constrained optimal control problems. Furthermore, finding all such local GNEs requires exploring the solution space of GNEs, which is a challenging task. This work proposes the MultiNash-PF framework to efficiently compute multiple local GNEs in constrained trajectory games. Potential games are a class of games for which a local GNE of a trajectory game can be found by solving a single constrained optimal control problem. We propose MultiNash-PF that integrates the potential game approach with implicit particle filtering, a sample-efficient method for non-convex trajectory optimization. We first formulate the underlying game as a constrained potential game and then utilize the implicit particle filtering to identify the coarse estimates of multiple local minimizers of the game's potential function. MultiNash-PF then refines these estimates with optimization solvers, obtaining different local GNEs. We show through numerical simulations that MultiNash-PF reduces computation time by up to 50\% compared to a baseline approach.
Model Predictive Inferential Control of Neural State-Space Models for Autonomous Vehicle Motion Planning
Oct 20, 2023Model predictive control (MPC) has proven useful in enabling safe and optimal motion planning for autonomous vehicles. In this paper, we investigate how to achieve MPC-based motion planning when a neural state-space model represents the vehicle dynamics. As the neural state-space model will lead to highly complex, nonlinear and nonconvex optimization landscapes, mainstream gradient-based MPC methods will be computationally too heavy to be a viable solution. In a departure, we propose the idea of model predictive inferential control (MPIC), which seeks to infer the best control decisions from the control objectives and constraints. Following the idea, we convert the MPC problem for motion planning into a Bayesian state estimation problem. Then, we develop a new particle filtering/smoothing approach to perform the estimation. This approach is implemented as banks of unscented Kalman filters/smoothers and offers high sampling efficiency, fast computation, and estimation accuracy. We evaluate the MPIC approach through a simulation study of autonomous driving in different scenarios, along with an exhaustive comparison with gradient-based MPC. The results show that the MPIC approach has considerable computational efficiency, regardless of complex neural network architectures, and shows the capability to solve large-scale MPC problems for neural state-space models.
Application-Oriented Co-Design of Motors and Motions for a 6DOF Robot Manipulator
Oct 04, 2023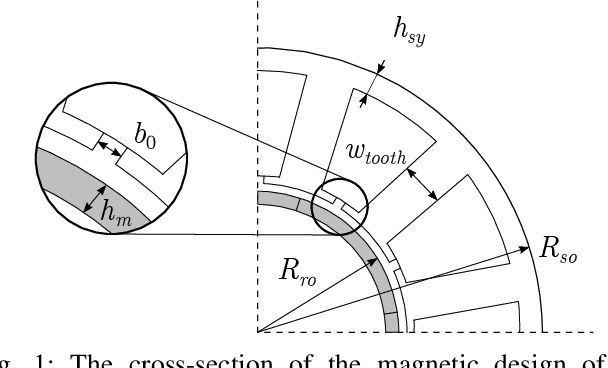
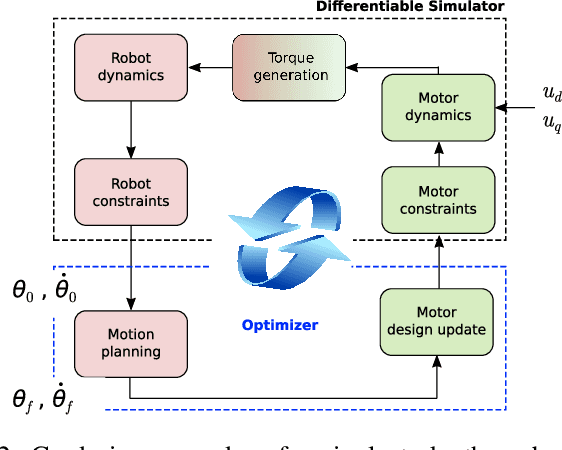
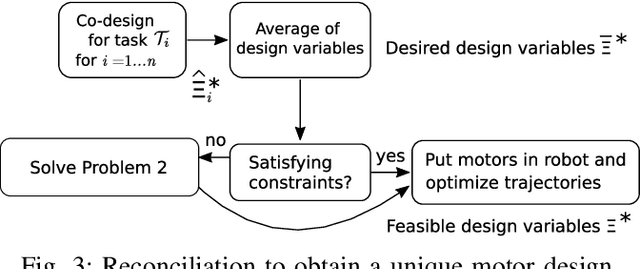
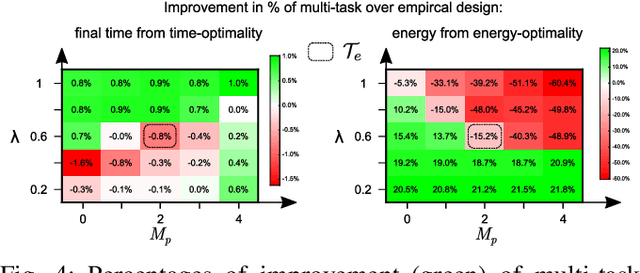
This work investigates an application-driven co-design problem where the motion and motors of a six degrees of freedom robotic manipulator are optimized simultaneously, and the application is characterized by a set of tasks. Unlike the state-of-the-art which selects motors from a product catalogue and performs co-design for a single task, this work designs the motor geometry as well as motion for a specific application. Contributions are made towards solving the proposed co-design problem in a computationally-efficient manner. First, a two-step process is proposed, where multiple motor designs are identified by optimizing motions and motors for multiple tasks one by one, and then are reconciled to determine the final motor design. Second, magnetic equivalent circuit modeling is exploited to establish the analytic mapping from motor design parameters to dynamic models and objective functions to facilitate the subsequent differentiable simulation. Third, a direct-collocation-based differentiable simulator of motor and robotic arm dynamics is developed to balance the computational complexity and numerical stability. Simulation verifies that higher performance for a specific application can be achieved with the multi-task method, compared to several benchmark co-design methods.
Model Predictive Control of Nonlinear Latent Force Models: A Scenario-Based Approach
Jul 28, 2022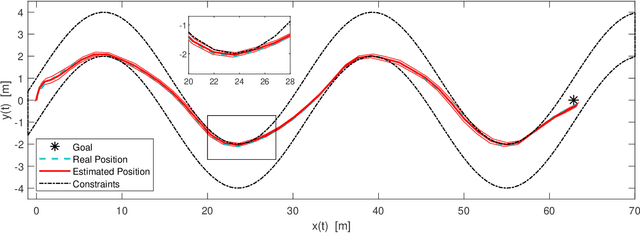



Control of nonlinear uncertain systems is a common challenge in the robotics field. Nonlinear latent force models, which incorporate latent uncertainty characterized as Gaussian processes, carry the promise of representing such systems effectively, and we focus on the control design for them in this work. To enable the design, we adopt the state-space representation of a Gaussian process to recast the nonlinear latent force model and thus build the ability to predict the future state and uncertainty concurrently. Using this feature, a stochastic model predictive control problem is formulated. To derive a computational algorithm for the problem, we use the scenario-based approach to formulate a deterministic approximation of the stochastic optimization. We evaluate the resultant scenario-based model predictive control approach through a simulation study based on motion planning of an autonomous vehicle, which shows much effectiveness. The proposed approach can find prospective use in various other robotics applications.
Sampling-Based Nonlinear MPC of Neural Network Dynamics with Application to Autonomous Vehicle Motion Planning
May 09, 2022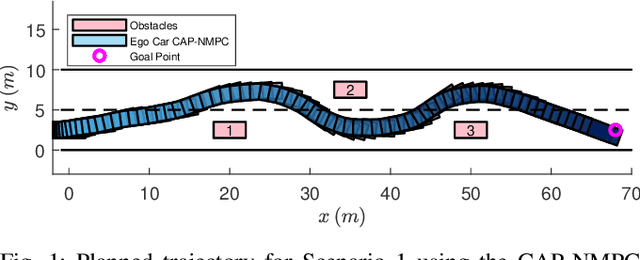
Control of machine learning models has emerged as an important paradigm for a broad range of robotics applications. In this paper, we present a sampling-based nonlinear model predictive control (NMPC) approach for control of neural network dynamics. We show its design in two parts: 1) formulating conventional optimization-based NMPC as a Bayesian state estimation problem, and 2) using particle filtering/smoothing to achieve the estimation. Through a principled sampling-based implementation, this approach can potentially make effective searches in the control action space for optimal control and also facilitate computation toward overcoming the challenges caused by neural network dynamics. We apply the proposed NMPC approach to motion planning for autonomous vehicles. The specific problem considers nonlinear unknown vehicle dynamics modeled as neural networks as well as dynamic on-road driving scenarios. The approach shows significant effectiveness in successful motion planning in case studies.
Integrating Physics-Based Modeling with Machine Learning for Lithium-Ion Batteries
Dec 24, 2021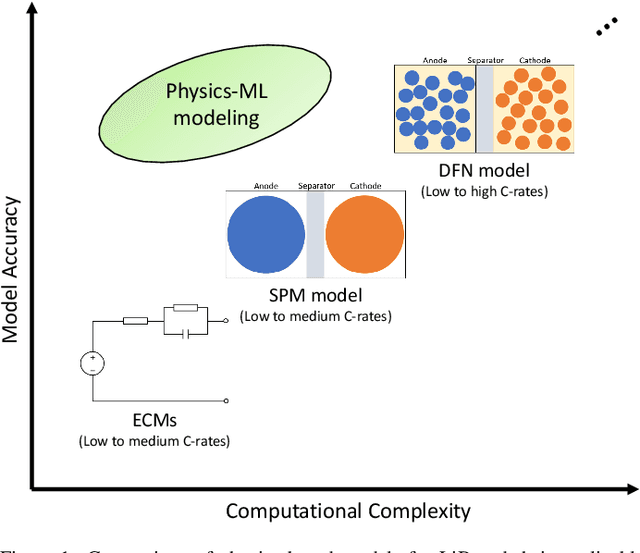
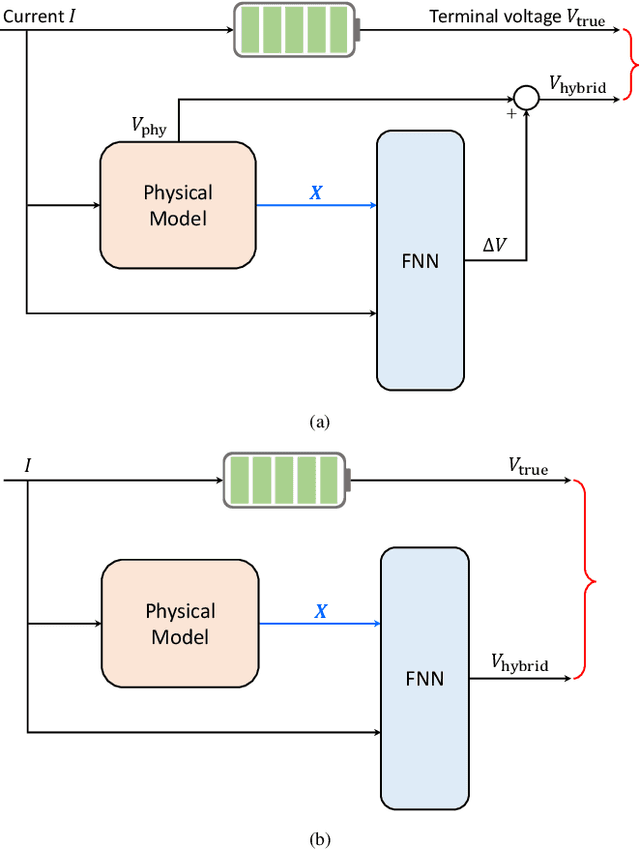

Mathematical modeling of lithium-ion batteries (LiBs) is a primary challenge in advanced battery management. This paper proposes two new frameworks to integrate a physics-based model with machine learning to achieve high-precision modeling for LiBs. The frameworks are characterized by informing the machine learning model of the state information of the physical model, enabling a deep integration between physics and machine learning. Based on the frameworks, a series of hybrid models are constructed, through combining an electrochemical model and an equivalent circuit model, respectively, with a feedforward neural network. The hybrid models are relatively parsimonious in structure and can provide considerable predictive accuracy under a broad range of C-rates, as shown by extensive simulations and experiments. The study further expands to conduct aging-aware hybrid modeling, leading to the design of a hybrid model conscious of the state-of-health to make prediction. Experiments show that the model has high predictive accuracy throughout a LiB's cycle life.
Integrating Electrochemical Modeling with Machine Learning for Lithium-Ion Batteries
Apr 15, 2021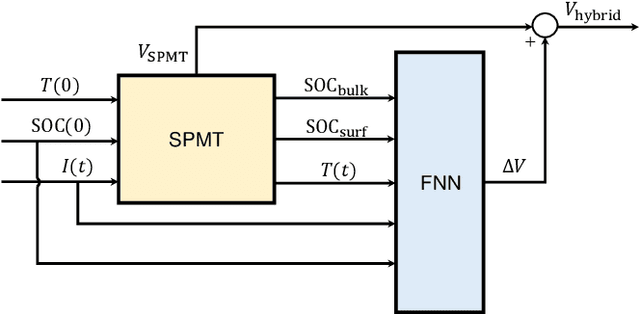
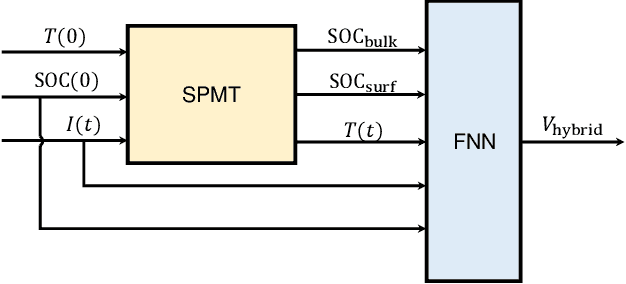
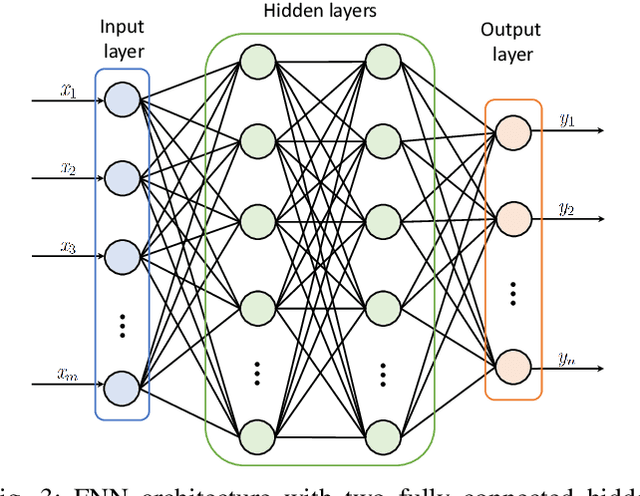
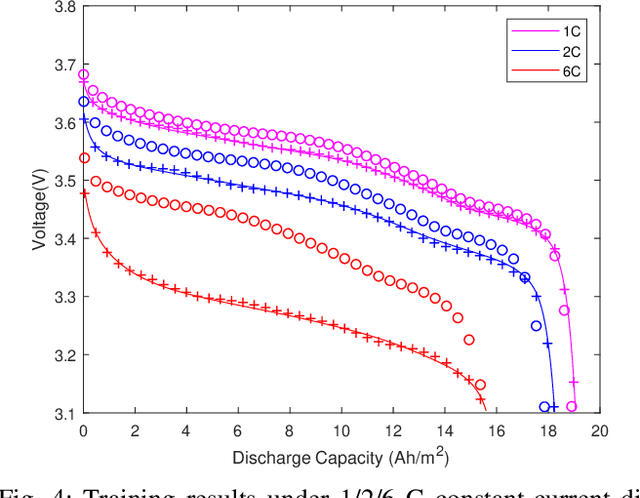
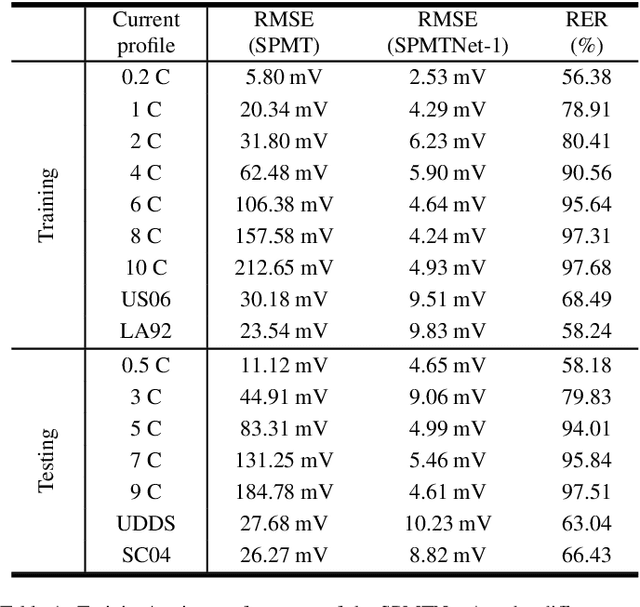
Mathematical modeling of lithium-ion batteries (LiBs) is a central challenge in advanced battery management. This paper presents a new approach to integrate a physics-based model with machine learning to achieve high-precision modeling for LiBs. This approach uniquely proposes to inform the machine learning model of the dynamic state of the physical model, enabling a deep integration between physics and machine learning. We propose two hybrid physics-machine learning models based on the approach, which blend a single particle model with thermal dynamics (SPMT) with a feedforward neural network (FNN) to perform physics-informed learning of a LiB's dynamic behavior. The proposed models are relatively parsimonious in structure and can provide considerable predictive accuracy even at high C-rates, as shown by extensive simulations.