 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll-in-One Image Restoration via Causal-Deconfounding Wavelet-Disentangled Prompt Network
Mar 04, 2026Image restoration represents a promising approach for addressing the inherent defects of image content distortion. Standard image restoration approaches suffer from high storage cost and the requirement towards the known degradation pattern, including type and degree, which can barely be satisfied in dynamic practical scenarios. In contrast, all-in-one image restoration (AiOIR) eliminates multiple degradations within a unified model to circumvent the aforementioned issues. However, according to our causal analysis, we disclose that two significant defects still exacerbate the effectiveness and generalization of AiOIR models: 1) the spurious correlation between non-degradation semantic features and degradation patterns; 2) the biased estimation of degradation patterns. To obtain the true causation between degraded images and restored images, we propose Causal-deconfounding Wavelet-disentangled Prompt Network (CWP-Net) to perform effective AiOIR. CWP-Net introduces two modules for decoupling, i.e., wavelet attention module of encoder and wavelet attention module of decoder. These modules explicitly disentangle the degradation and semantic features to tackle the issue of spurious correlation. To address the issue stemming from the biased estimation of degradation patterns, CWP-Net leverages a wavelet prompt block to generate the alternative variable for causal deconfounding. Extensive experiments on two all-in-one settings prove the effectiveness and superior performance of our proposed CWP-Net over the state-of-the-art AiOIR methods.
Plug-and-Play Algorithm Convergence Analysis From The Standpoint of Stochastic Differential Equation
Apr 22, 2024



The Plug-and-Play (PnP) algorithm is popular for inverse image problem-solving. However, this algorithm lacks theoretical analysis of its convergence with more advanced plug-in denoisers. We demonstrate that discrete PnP iteration can be described by a continuous stochastic differential equation (SDE). We can also achieve this transformation through Markov process formulation of PnP. Then, we can take a higher standpoint of PnP algorithms from stochastic differential equations, and give a unified framework for the convergence property of PnP according to the solvability condition of its corresponding SDE. We reveal that a much weaker condition, bounded denoiser with Lipschitz continuous measurement function would be enough for its convergence guarantee, instead of previous Lipschitz continuous denoiser condition.
Application-Oriented Co-Design of Motors and Motions for a 6DOF Robot Manipulator
Oct 04, 2023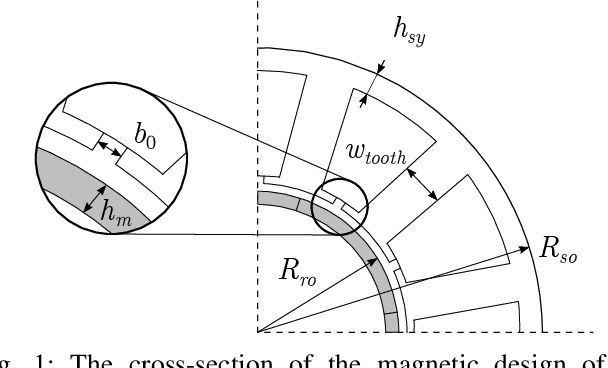
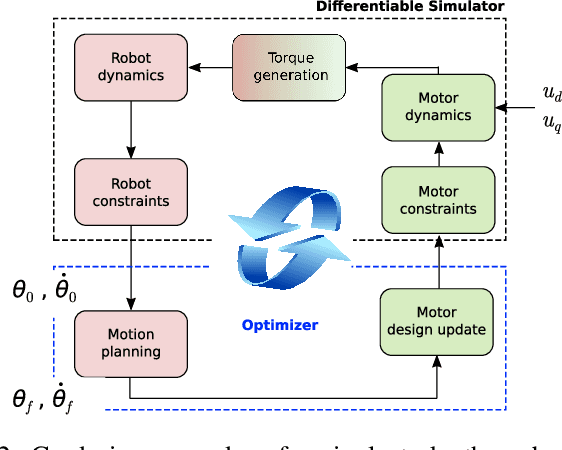
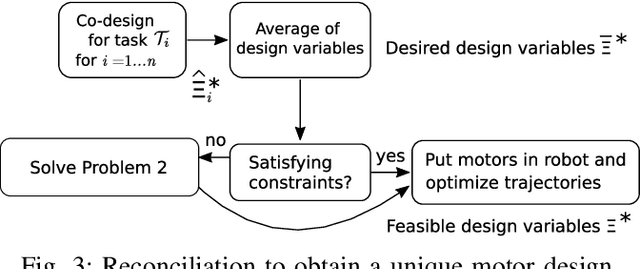
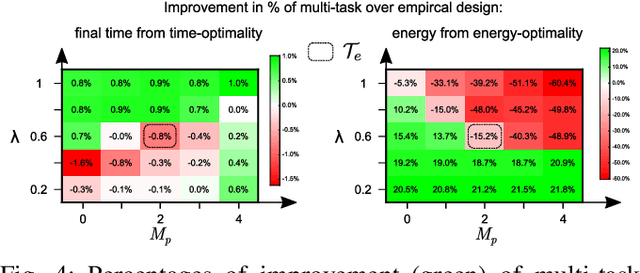
This work investigates an application-driven co-design problem where the motion and motors of a six degrees of freedom robotic manipulator are optimized simultaneously, and the application is characterized by a set of tasks. Unlike the state-of-the-art which selects motors from a product catalogue and performs co-design for a single task, this work designs the motor geometry as well as motion for a specific application. Contributions are made towards solving the proposed co-design problem in a computationally-efficient manner. First, a two-step process is proposed, where multiple motor designs are identified by optimizing motions and motors for multiple tasks one by one, and then are reconciled to determine the final motor design. Second, magnetic equivalent circuit modeling is exploited to establish the analytic mapping from motor design parameters to dynamic models and objective functions to facilitate the subsequent differentiable simulation. Third, a direct-collocation-based differentiable simulator of motor and robotic arm dynamics is developed to balance the computational complexity and numerical stability. Simulation verifies that higher performance for a specific application can be achieved with the multi-task method, compared to several benchmark co-design methods.
Neural Invertible Variable-degree Optical Aberrations Correction
Apr 12, 2023



Optical aberrations of optical systems cause significant degradation of imaging quality. Aberration correction by sophisticated lens designs and special glass materials generally incurs high cost of manufacturing and the increase in the weight of optical systems, thus recent work has shifted to aberration correction with deep learning-based post-processing. Though real-world optical aberrations vary in degree, existing methods cannot eliminate variable-degree aberrations well, especially for the severe degrees of degradation. Also, previous methods use a single feed-forward neural network and suffer from information loss in the output. To address the issues, we propose a novel aberration correction method with an invertible architecture by leveraging its information-lossless property. Within the architecture, we develop conditional invertible blocks to allow the processing of aberrations with variable degrees. Our method is evaluated on both a synthetic dataset from physics-based imaging simulation and a real captured dataset. Quantitative and qualitative experimental results demonstrate that our method outperforms compared methods in correcting variable-degree optical aberrations.
A survey on facial image deblurring
Feb 10, 2023When the facial image is blurred, it has a great impact on high-level vision tasks such as face recognition. The purpose of facial image deblurring is to recover a clear image from a blurry input image, which can improve the recognition accuracy and so on. General deblurring methods can not perform well on facial images. So some face deblurring methods are proposed to improve the performance by adding semantic or structural information as specific priors according to the characteristics of facial images. This paper surveys and summarizes recently published methods for facial image deblurring, most of which are based on deep learning. Firstly, we give a brief introduction to the modeling of image blur. Next, we summarize face deblurring methods into two categories, namely model-based methods and deep learning-based methods. Furthermore, we summarize the datasets, loss functions, and performance evaluation metrics commonly used in the neural network training process. We show the performance of classical methods on these datasets and metrics and give a brief discussion on the differences of model-based and learning-based methods. Finally, we discuss current challenges and possible future research directions.
Few-Shot Bearing Anomaly Detection Based on Model-Agnostic Meta-Learning
Jul 28, 2020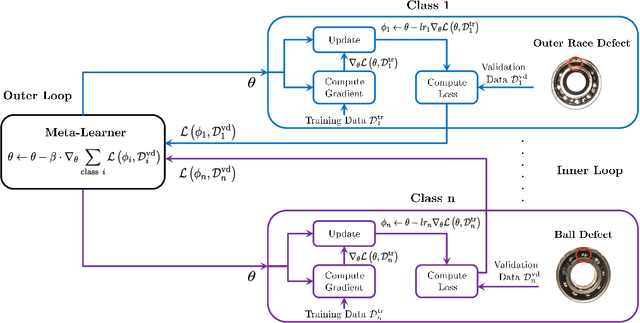
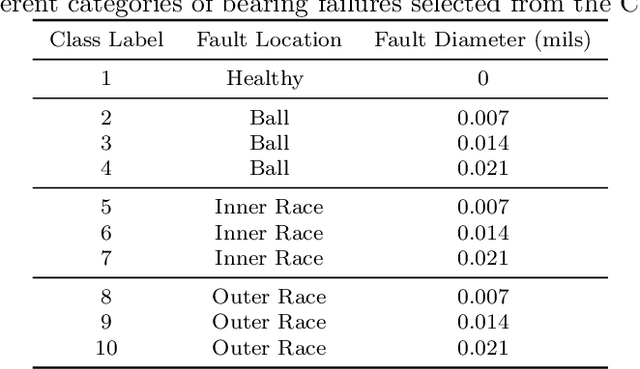

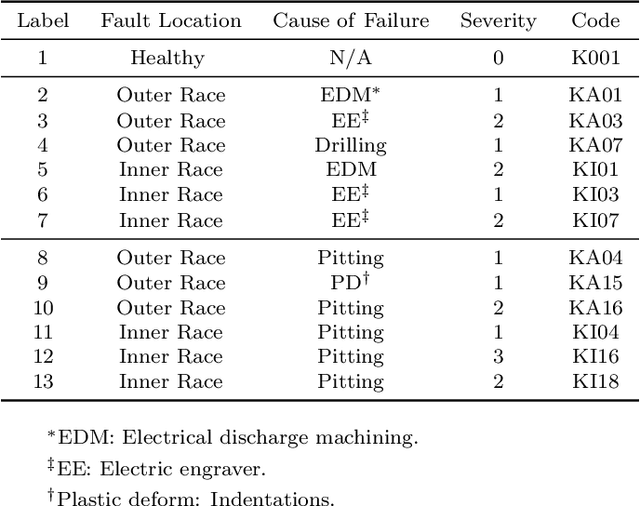
The rapid development of artificial intelligence and deep learning technology has provided many opportunities to further enhance the safety, stability, and accuracy of industrial Cyber-Physical Systems (CPS). As indispensable components to many mission-critical CPS assets and equipment, mechanical bearings need to be monitored to identify any trace of abnormal conditions. Most of the data-driven approaches applied to bearing anomaly detection up-to-date are trained using a large amount of fault data collected a priori. In many practical applications, however, it can be unsafe and time-consuming to collect sufficient data samples for each fault category, making it challenging to train a robust classifier. In this paper, we propose a few-shot learning approach for bearing anomaly detection based on model-agnostic meta-learning (MAML), which targets for training an effective fault classifier using limited data. In addition, it can leverage the training data and learn to identify new fault scenarios more efficiently. Case studies on the generalization to new artificial faults show that the proposed method achieves an overall accuracy up to 25% higher than a Siamese-network-based benchmark study. Finally, the robustness of the generalization capability of MAML is further validated by case studies of applying the algorithm to identify real bearing damages using data from artificial damages.
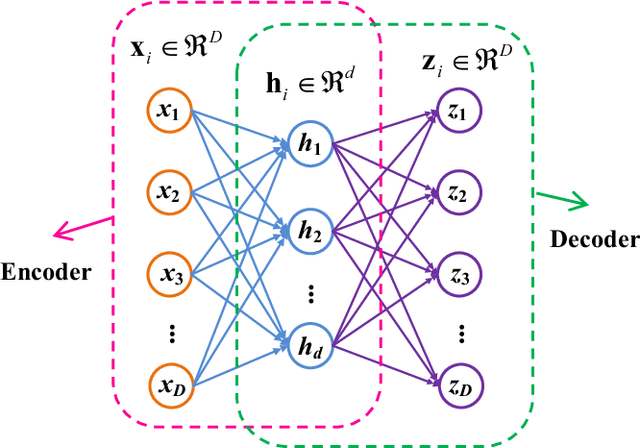
Semi-Supervised Learning of Bearing Anomaly Detection via Deep Variational Autoencoders
Dec 09, 2019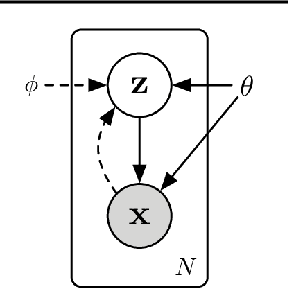
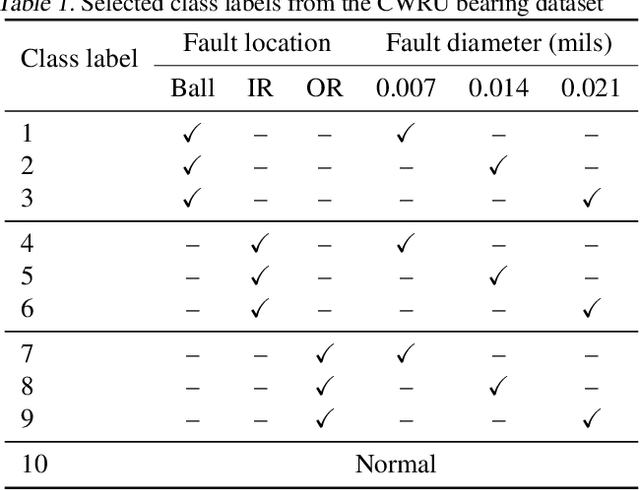
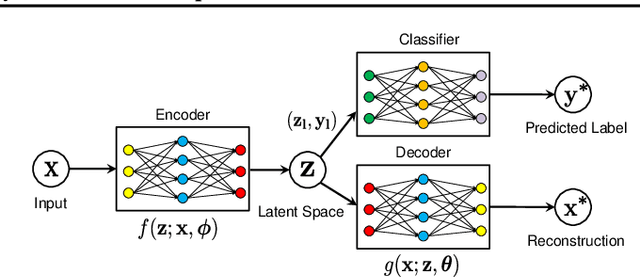
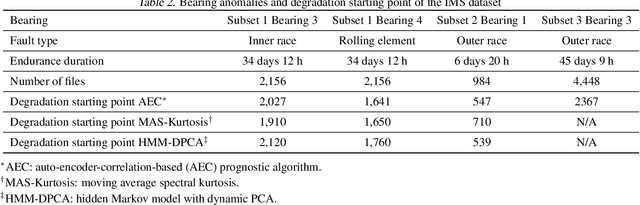
Most of the data-driven approaches applied to bearing fault diagnosis up to date are established in the supervised learning paradigm, which usually requires a large set of labeled data collected a priori. In practical applications, however, obtaining accurate labels based on real-time bearing conditions can be far more challenging than simply collecting a huge amount of unlabeled data using various sensors. In this paper, we thus propose a semi-supervised learning approach for bearing anomaly detection using variational autoencoder (VAE) based deep generative models, which allows for effective utilization of dataset when only a small subset of data have labels. Finally, a series of experiments is performed using both the Case Western Reserve University (CWRU) bearing dataset and the University of Cincinnati's Center for Intelligent Maintenance Systems (IMS) dataset. The experimental results demonstrate that the proposed semi-supervised learning scheme greatly outperforms two mainstream semi-supervised learning approaches and a baseline supervised convolutional neural network approach, with the overall accuracy improvement ranging between 3% to 30% using different proportions of labeled samples.
Machine Learning and Deep Learning Algorithms for Bearing Fault Diagnostics - A Comprehensive Review
Jan 24, 2019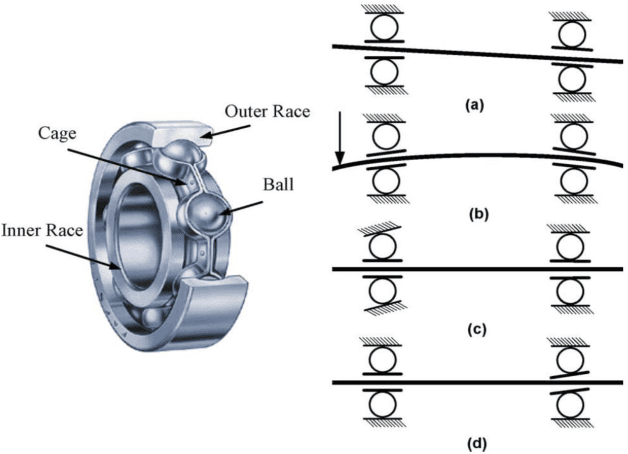
In this survey paper, we systematically summarize the current literature on studies that apply machine learning (ML) and data mining techniques to bearing fault diagnostics. Conventional ML methods, including artificial neural network (ANN), principal component analysis (PCA), support vector machines (SVM), etc., have been successfully applied to detecting and categorizing bearing faults since the last decade, while the application of deep learning (DL) methods has sparked great interest in both the industry and academia in the last five years. In this paper, we will first review the conventional ML methods, before taking a deep dive into the latest developments in DL algorithms for bearing fault applications. Specifically, the superiority of the DL based methods over the conventional ML methods are analyzed in terms of metrics directly related to fault feature extraction and classifier performances; the new functionalities offered by DL techniques that cannot be accomplished before are also summarized. In addition, to obtain a more intuitive insight, a comparative study is performed on the classifier performance and accuracy for a number of papers utilizing the open source Case Western Reserve University (CWRU) bearing data set. Finally, based on the nature of the time-series 1-D data obtained from sensors monitoring the bearing conditions, recommendations and suggestions are provided to applying DL algorithms on bearing fault diagnostics based on specific applications, as well as future research directions to further improve its performance.