Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Approximate Dynamic Programming Via Kernelized Lipschitz Estimation
Jul 03, 2019
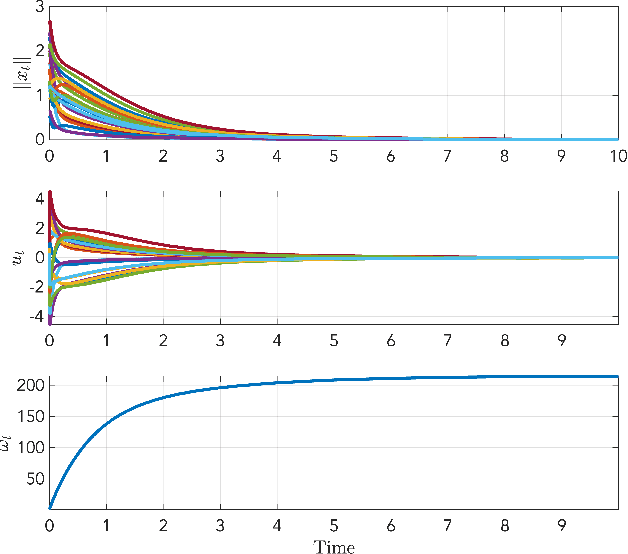


We develop a method for obtaining safe initial policies for reinforcement learning via approximate dynamic programming (ADP) techniques for uncertain systems evolving with discrete-time dynamics. We employ kernelized Lipschitz estimation and semidefinite programming for computing admissible initial control policies with provably high probability. Such admissible controllers enable safe initialization and constraint enforcement while providing exponential stability of the equilibrium of the closed-loop system.
Via